Ecosyste.ms: Awesome
An open API service indexing awesome lists of open source software.
https://github.com/PiotrMachowski/Home-Assistant-custom-components-Xiaomi-Cloud-Map-Extractor
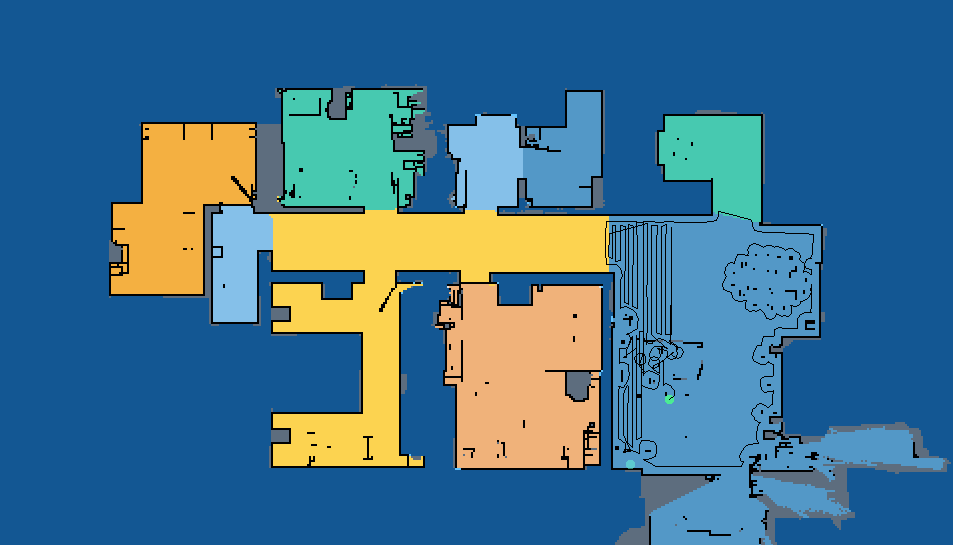
This custom integration provides a way to present a live view of a map for Xiaomi (Roborock/Viomi/Roidmi/Dreame) vacuums without a need for rooting.
https://github.com/PiotrMachowski/Home-Assistant-custom-components-Xiaomi-Cloud-Map-Extractor
cloud custom-component dreame hacs home-assistant map roborock robot roidmi vacuum vacuum-map viomi xiaomi xiaomi-smart-home xiaomi-vacuum
Last synced: 2 months ago
JSON representation
This custom integration provides a way to present a live view of a map for Xiaomi (Roborock/Viomi/Roidmi/Dreame) vacuums without a need for rooting.
- Host: GitHub
- URL: https://github.com/PiotrMachowski/Home-Assistant-custom-components-Xiaomi-Cloud-Map-Extractor
- Owner: PiotrMachowski
- License: mit
- Created: 2020-09-29T22:35:24.000Z (over 3 years ago)
- Default Branch: master
- Last Pushed: 2024-01-24T21:33:35.000Z (5 months ago)
- Last Synced: 2024-01-29T22:58:53.715Z (5 months ago)
- Topics: cloud, custom-component, dreame, hacs, home-assistant, map, roborock, robot, roidmi, vacuum, vacuum-map, viomi, xiaomi, xiaomi-smart-home, xiaomi-vacuum
- Language: Python
- Homepage:
- Size: 553 KB
- Stars: 1,052
- Watchers: 37
- Forks: 112
- Open Issues: 71
-
Metadata Files:
- Readme: README.md
- Funding: .github/FUNDING.yml
- License: LICENSE
Lists
- awesome-home-assistant - Xiaomi Cloud Map Extractor - Presents a live view of a map for Xiaomi (Roborock/Viomi/Roidmi/Dreame) vacuums without a need for rooting. (Custom Integrations / Alternative Dashboards)
- Self-Hosting-Guide - Xiaomi Cloud Map Extractor - Presents a live view of a map for Xiaomi (Roborock/Viomi/Roidmi/Dreame) vacuums without a need for rooting. (Install from Source / Smart Home Automation)
README
[![HACS Default][hacs_shield]][hacs]
[![GitHub Latest Release][releases_shield]][latest_release]
[![GitHub All Releases][downloads_total_shield]][releases]
[![Community Forum][community_forum_shield]][community_forum]
[![Ko-Fi][ko_fi_shield]][ko_fi]
[![buycoffee.to][buycoffee_to_shield]][buycoffee_to]
[![PayPal.Me][paypal_me_shield]][paypal_me]
[![Revolut.Me][revolut_me_shield]][revolut_me]
[hacs_shield]: https://img.shields.io/static/v1.svg?label=HACS&message=Default&style=popout&color=green&labelColor=41bdf5&logo=HomeAssistantCommunityStore&logoColor=white
[hacs]: https://hacs.xyz/docs/default_repositories
[latest_release]: https://github.com/PiotrMachowski/Home-Assistant-custom-components-Xiaomi-Cloud-Map-Extractor/releases/latest
[releases_shield]: https://img.shields.io/github/release/PiotrMachowski/Home-Assistant-custom-components-Xiaomi-Cloud-Map-Extractor.svg?style=popout
[releases]: https://github.com/PiotrMachowski/Home-Assistant-custom-components-Xiaomi-Cloud-Map-Extractor/releases
[downloads_total_shield]: https://img.shields.io/github/downloads/PiotrMachowski/Home-Assistant-custom-components-Xiaomi-Cloud-Map-Extractor/total
[community_forum_shield]: https://img.shields.io/static/v1.svg?label=%20&message=Forum&style=popout&color=41bdf5&logo=HomeAssistant&logoColor=white
[community_forum]: https://community.home-assistant.io/t/xiaomi-cloud-vacuum-map-extractor/231292
# Xiaomi Cloud Map Extractor
This custom integration provides a way to present a live view of a map for Xiaomi, Roborock, Viomi, Roidmi and Dreame vacuums.
([Supported devices](#supported-devices))

## Installation
### Using [HACS](https://hacs.xyz/) (recommended)
This integration can be installed using HACS.
To do it search for `Xiaomi Cloud Map Extractor` in *Integrations* section.
### Manual
To install this integration manually you have to download [*xiaomi_cloud_map_extractor.zip*](https://github.com/PiotrMachowski/Home-Assistant-custom-components-Xiaomi-Cloud-Map-Extractor/releases/latest/download/xiaomi_cloud_map_extractor.zip) and extract its contents to `config/custom_components/xiaomi_cloud_map_extractor` directory:
```bash
mkdir -p custom_components/xiaomi_cloud_map_extractor
cd custom_components/xiaomi_cloud_map_extractor
wget https://github.com/PiotrMachowski/Home-Assistant-custom-components-Xiaomi-Cloud-Map-Extractor/releases/latest/download/xiaomi_cloud_map_extractor.zip
unzip xiaomi_cloud_map_extractor.zip
rm xiaomi_cloud_map_extractor.zip
```
## Configuration
After installation of the custom component, it needs to be configured in `configuration.yaml` file.
To do so, add a camera entry to your configuration with at least a [basic](#basic) or [recommended](#recommended) configuration.
Vacuum token can be extracted by following [this guide](https://www.home-assistant.io/integrations/xiaomi_miio/#retrieving-the-access-token) (ignore "not recommended" message, as it applies only to built-in Xiaomi Miio integration).
You also need to enter your Xiaomi Cloud username and password.
These are the credentials used for the Xiaomi Home app (_not ones from Roborock app_).
After installation and a reboot of your Home Assistant instance, you should get a camera entity which shows the vacuum map.
This might take a few minutes after a first restart.
If you have a problem with configuration validation you have to remove camera from `configuration.yaml`, restart Home Assistant, add camera config and restart HA again.
After modification of camera's configuration you can reload its settings in [Configuration](https://my.home-assistant.io/redirect/config/) or using `xiaomi_cloud_map_extractor.reload` service.
### Examples
#### Basic
```yaml
camera:
- platform: xiaomi_cloud_map_extractor
host: !secret xiaomi_vacuum_host
token: !secret xiaomi_vacuum_token
username: !secret xiaomi_cloud_username
password: !secret xiaomi_cloud_password
```
#### Recommended
```yaml
camera:
- platform: xiaomi_cloud_map_extractor
host: !secret xiaomi_vacuum_host
token: !secret xiaomi_vacuum_token
username: !secret xiaomi_cloud_username
password: !secret xiaomi_cloud_password
draw: ['all']
attributes:
- calibration_points
```
#### Full
| This configuration's purpose is to show all available options, do not use it unless you know what you are doing. |
| --- |
I know what I'm doing and I will not recklessly copy this config to my setup
```yaml
camera:
- platform: xiaomi_cloud_map_extractor
host: !secret xiaomi_vacuum_host
token: !secret xiaomi_vacuum_token
username: !secret xiaomi_cloud_username
password: !secret xiaomi_cloud_password
country: "de"
name: "My Vacuum Camera"
colors:
color_map_inside: [32, 115, 185]
color_map_outside: [19, 87, 148]
color_map_wall: [100, 196, 254]
color_map_wall_v2: [93, 109, 126]
color_grey_wall: [93, 109, 126]
color_ignored_obstacle: [0, 0, 0, 127]
color_ignored_obstacle_with_photo: [0, 0, 0, 127]
color_obstacle: [0, 0, 0, 127]
color_obstacle_with_photo: [0, 0, 0, 127]
color_path: [147, 194, 238]
color_goto_path: [0, 255, 0]
color_predicted_path: [255, 255, 0, 0]
color_cleaned_area: [127, 127, 127, 127]
color_zones: [0xAD, 0xD8, 0xFF, 0x8F]
color_zones_outline: [0xAD, 0xD8, 0xFF]
color_virtual_walls: [255, 0, 0]
color_new_discovered_area: [64, 64, 64]
color_no_go_zones: [255, 33, 55, 127]
color_no_go_zones_outline: [255, 0, 0]
color_no_mop_zones: [163, 130, 211, 127]
color_no_mop_zones_outline: [163, 130, 211]
color_charger: [0x66, 0xfe, 0xda, 0x7f]
color_robo: [75, 235, 149]
color_room_names: [0, 0, 0]
color_unknown: [0, 0, 0]
color_scan: [0xDF, 0xDF, 0xDF]
room_colors:
1: [240, 178, 122]
2: [133, 193, 233]
3: [217, 136, 128]
4: [52, 152, 219]
5: [205, 97, 85]
6: [243, 156, 18]
7: [88, 214, 141]
8: [245, 176, 65]
9: [252, 212, 81]
10: [72, 201, 176]
11: [84, 153, 199]
12: [133, 193, 233]
13: [245, 176, 65]
14: [82, 190, 128]
15: [72, 201, 176]
16: [165, 105, 18]
draw:
- charger
- cleaned_area
- goto_path
- ignored_obstacles
- ignored_obstacles_with_photo
- no_go_zones
- no_mopping_zones
- obstacles
- obstacles_with_photo
- path
- predicted_path
- room_names
- vacuum_position
- virtual_walls
- zones
texts:
- text: "Room 1"
x: 25
y: 25
color: [125, 20, 213]
- text: "Room 2"
x: 25
y: 75
color: [125, 20, 213, 127]
font: "FreeSans.ttf"
font_size: 25
map_transformation:
scale: 2
rotate: 180
trim:
top: 10
bottom: 20
left: 30
right: 40
sizes:
charger_radius: 4
vacuum_radius: 6.5
path_width: 1
obstacle_radius: 3
ignored_obstacle_radius: 3
obstacle_with_photo_radius: 3
ignored_obstacle_with_photo_radius: 3
attributes:
- calibration_points
- charger
- cleaned_rooms
- country
- goto
- goto_path
- goto_predicted_path
- image
- is_empty
- map_name
- no_go_areas
- no_mopping_areas
- obstacles
- ignored_obstacles
- obstacles_with_photo
- ignored_obstacles_with_photo
- path
- room_numbers
- rooms
- vacuum_position
- vacuum_room
- vacuum_room_name
- walls
- zones
scan_interval:
seconds: 10
auto_update: true
store_map_raw: false
store_map_image: true
store_map_path: "/tmp"
force_api: xiaomi
```
### Available configuration parameters
| Key | Type | Required | Value | Description |
|---|---|---|---|---|
| `platform` | string | true | `xiaomi_cloud_map_extractor` | Name of a platform |
| `host` | string | true | `192.168.0.123` | IP address of a vacuum |
| `token` | string | true | `ghjhca3ykg8o2zyyj7xb5adamhgsypel` | Token of a vacuum |
| `username` | string | true | `[email protected]` | Username (email or user ID) used to connect to Xiaomi cloud (the account used in the Xiaomi Home app) |
| `password` | string | true | `aVerySecretPassword` | Password used to connect to Xiaomi cloud (the account used in the Xiaomi Home app) |
| `name` | string | false | | Desired name of camera entity |
| `country` | string | false | One of: `cn`, `de`, `us`, `ru`, `tw`, `sg`, `in`, `i2` | Server used in Xiaomi cloud. Leave empty if you are not sure. |
| `colors` | map | false | | Colors configuration ([see below](#colors-configuration)) |
| `room_colors` | map | false | | Room colors configuration ([see below](#room-colors-configuration)) |
| `draw` | list | false | | List of elements to draw on a map ([see below](#draw-configuration)) |
| `texts` | list | false | | List of texts to draw on a map ([see below](#texts-configuration)) |
| `map_transformation` | map | false | | Parameters of map transformation ([see below](#map-transformation-configuration)) |
| `sizes` | map | false | | Sizes of map's elements ([see below](#sizes-configuration)) |
| `attributes` | list | false | | List of desired entity attributes ([see below](#attributes-configuration)) |
| `scan_interval` | interval | false | default: `5` seconds | Interval between map updates ([documentation](https://www.home-assistant.io/docs/configuration/platform_options/#scan-interval)) |
| `auto_update` | boolean | false | default: `true` | Activation/deactivation of automatic map updates. ([see below](#updates)) |
| `store_map_raw` | boolean | false | default: `false` | Enables storing raw map data in `store_map_path` directory ([more info](#retrieving-map)). Xiaomi map can be opened with [RoboMapViewer](https://github.com/marcelrv/XiaomiRobotVacuumProtocol/tree/master/RRMapFile). |
| `store_map_image` | boolean | false | default: `false` | Enables storing map image in `store_map_path` path with name `map_image_.png` |
| `store_map_path` | string | false | default: `/tmp` | Storing map data directory |
| `force_api` | string | false | One of: `xiaomi`, `viomi`, `roidmi`, `dreame` | Forces usage of specific API. |
#### Colors configuration
Each color is represented by a list of 3 or 4 parameters: `[red, green, blue]` or `[red, green, blue, alpha]`.
Each parameter is a number from a range 0-255 and can be also provided as a HEX value: [0x12, 0xAF, 0xC5] matches #12AFC5.

| Color name | Description |
| --- | --- |
| `color_charger` | Charger fill |
| `color_charger_outline` | Charger outline |
| `color_cleaned_area` | Fill of area that already has been cleaned |
| `color_goto_path` | Path for goto mode |
| `color_grey_wall` | Obstacles (e.g. chairs, table legs) |
| `color_ignored_obstacle_with_photo` | Ignored obstacle with photo mark on a map |
| `color_ignored_obstacle` | Ignored obstacle mark on a map |
| `color_map_inside` | Map inside (for software without rooms support) |
| `color_map_outside` | Map outside |
| `color_map_wall_v2` | Walls (for software with rooms support) |
| `color_map_wall` | Walls (for software without rooms support) |
| `color_new_discovered_area` | Newly discovered areas |
| `color_no_go_zones_outline` | Outline of no-go zones |
| `color_no_go_zones` | Fill of no-go zones |
| `color_no_mop_zones_outline` | Outline of no-mopping zones |
| `color_no_mop_zones` | Fill of no-mopping zones |
| `color_obstacle_with_photo` | Obstacle with photo mark on a map |
| `color_obstacle` | Obstacle mark on a map |
| `color_path` | Path of a vacuum |
| `color_predicted_path` | Predicted path to a point in goto mode |
| `color_robo` | Vacuum fill |
| `color_robo_outline` | Vacuum outline |
| `color_room_names` | Room names (if available) |
| `color_scan` | Areas not assigned to any room (for software with rooms support) |
| `color_unknown` | Other areas |
| `color_virtual_walls` | Virtual walls |
| `color_zones_outline` | Outline of areas selected for zoned cleaning |
| `color_zones` | Fill of areas selected for zoned cleaning |
#### Room colors configuration
This section contains mapping between room numbers and colors.
Each color is represented by a list of 3 or 4 parameters: `[red, green, blue]` or `[red, green, blue, alpha]`.
Each parameter is a number from a range 0-255 and can be also provided as a HEX value: [0x12, 0xAF, 0xC5] matches #12AFC5.
#### Draw configuration
A list of features to be drawn on a map. If all features should be drawn it can be replaced with:
```yaml
draw: ["all"]
```
Available values:
- `charger`
- `cleaned_area`
- `goto_path`
- `ignored_obstacles_with_photo`
- `ignored_obstacles`
- `no_go_zones`
- `no_mopping_zones`
- `obstacles_with_photo`
- `obstacles`
- `path`
- `predicted_path`
- `room_names`
- `vacuum_position`
- `virtual_walls`
- `zones`
#### Texts configuration
Each list entry must obey a following schema.
You can get a list of available fonts by executing this command:
```bash
fc-list | grep ttf | sed "s/.*\///"| sed "s/ttf.*/ttf/"
```
| Parameter | Type | Required | Default value | Description |
|---|---|---|---|---|
| `text` | string | true | | Text to draw on a map |
| `x` | float | true | | X position of a text (in percents) |
| `y` | float | true | | Y position of a text (in percents) |
| `color` | list | false | black | Desired color of a text, formatted like [here](#colors-configuration) |
| `font` | string | false | | Name of a font to use |
| `font_size` | int | false | | Size of a font |
#### Map transformation configuration
| Parameter | Type | Required | Default value | Description |
|---|---|---|---|---|
| `scale` | float | false | 1 | Scaling factor for a map. |
| `rotate` | integer | false | 0 | Angle of map rotation. Available values: [`0`, `90`, `180`, `270`] |
| `trim` | map | false | 0 | Map trimming configuration. Each trimming direction is in percents: value `25` means trimming of quarter of image size in a given dimension. Available keys: [`left`, `right`, `top`, `bottom`] |
#### Sizes configuration
| Parameter | Type | Required | Default value | Description |
|---|---|---|---|---|
| `charger_radius` | float | false | 6 | Radius of a charger circle. |
| `vacuum_radius` | float | false | 6 | Radius of a vacuum semi-circle. |
| `obstacle_radius` | float | false | 3 | Radius of an obstacle circle. |
| `ignored_obstacle_radius` | float | false | 3 | Radius of an ignored obstacle circle circle. |
| `obstacle_with_photo_radius` | float | false | 3 | Radius of an obstacle with photo circle. |
| `ignored_obstacle_with_photo_radius` | float | false | 3 | Radius of an ignored obstacle with photo circle. |
| `path_width` | float | false | 1 | Width of path line. |
#### Attributes configuration
A list of attributes that an entity should have.
Available values:
- `calibration_points` - Calculated calibration points for [Lovelace Xiaomi Vacuum Map card](https://github.com/PiotrMachowski/lovelace-xiaomi-vacuum-map-card).
- `charger`
- `cleaned_rooms`
- `country`
- `goto_path`
- `goto_predicted_path`
- `goto`
- `ignored_obstacles_with_photo`
- `ignored_obstacles`
- `image`
- `is_empty`
- `map_name`
- `no_go_areas`
- `no_mopping_areas`
- `obstacles_with_photo`
- `obstacles`
- `path`
- `room_numbers`
- `rooms`
- `vacuum_position`
- `vacuum_room_name`
- `vacuum_room`
- `walls`
- `zones`
## Updates
Camera image is updated every 5s by default.
It can be disabled in config using `auto_update` property.
You can also disable and enable automatic updates using services `camera.turn_off`, `camera.turn_on`.
If automatic updates are disabled you can manually trigger update using `homeassistant.update_entity` service.
You can change interval of automatic updates using `scan_interval` setting ([documentation](https://www.home-assistant.io/docs/configuration/platform_options/#scan-interval))
If you want to disable map updates when a vacuum is not running you can use [this blueprint](https://github.com/PiotrMachowski/Home-Assistant-custom-components-Xiaomi-Cloud-Map-Extractor/blob/master/blueprints/automation/disable_vacuum_camera_update_when_docked.yaml).
[](https://my.home-assistant.io/redirect/blueprint_import/?blueprint_url=https%3A%2F%2Fgithub.com%2FPiotrMachowski%2FHome-Assistant-custom-components-Xiaomi-Cloud-Map-Extractor%2Fblob%2Fmaster%2Fblueprints%2Fautomation%2Fdisable_vacuum_camera_update_when_docked.yaml)
## Supported devices
This integration was tested on following vacuums:
- Xiaomi map format:
- `rockrobo.vacuum.v1` (Xiaomi Vacuum Gen 1, Mi Robot Vacuum, SDJQR01RR, SDJQR02RR)
- `roborock.vacuum.m1s` (Xiaomi Mi Robot 1S)
- `roborock.vacuum.s4` (Roborock S4)
- `roborock.vacuum.s5` (Roborock S5)
- `roborock.vacuum.s5e` (Roborock S5 Max)
- `rockrobo.vacuum.s6` (Roborock S6)
- `roborock.vacuum.a08` (Roborock S6 Pure)
- `roborock.vacuum.a10` (Roborock S6 MaxV)
- `roborock.vacuum.a15` (Roborock S7)
- `roborock.vacuum.a19` (Roborocka S4 Max)
- `roborock.vacuum.a27` (Roborock S7 MaxV)
- Viomi map format:
- `viomi.vacuum.v6` (Viomi Vacuum V2 Pro, Xiaomi Mijia STYJ02YM, Mi Robot Vacuum Mop Pro)
- `viomi.vacuum.v7` (Mi Robot Vacuum-Mop Pro)
- `viomi.vacuum.v8` (Mi Robot Vacuum-Mop Pro)
- `viomi.vacuum.v13` (Viomi V3)
- Roidmi map format:
- `roidmi.vacuum.v60` (Roidmi EVE Plus)
- `viomi.vacuum.v18` (Viomi S9)
- `zhimi.vacuum.xa1` (Lydsto R1)
- Dreame map format:
- `dreame.vacuum.mc1808` (Xiaomi Mi Mop/Xiaomi Mijia 1C)
- `dreame.vacuum.p2008` (Dreame F9)
- `dreame.vacuum.p2009` (Dreame D9)
- `dreame.vacuum.p2028` (Dreame Z10 Pro)
- `dreame.vacuum.p2029` (Dreame L10 Pro)
- `dreame.vacuum.p2036` (Trouver LDS Cleaner)
- `dreame.vacuum.p2041o` (Xiaomi Mop 2 Pro+)
- `dreame.vacuum.p2140` (Mijia Robot Vacuum-Mop 2C)
- `dreame.vacuum.p2157` (MOVA L600)
- `dreame.vacuum.p2259` (Dreame D9 Max)
## Retrieving map
When `store_map_raw: true` is added to your config this integration will store a raw map file in `/tmp` directory.
If you don't use Core installation ([installation types](https://www.home-assistant.io/installation/#compare-installation-methods)) you can retrieve this file in the following way:
- In [SSH & Terminal add-on](https://github.com/hassio-addons/addon-ssh) enable protected access
- Open terminal and use the following command to copy file:
```
docker exec homeassistant bash -c "mkdir -p /config/tmp/ && cp /tmp/map_* /config/tmp/"
```
- Map file will appear in `tmp` folder in your `config` folder
## Enabling debug logging
To enable debug logging add following section to your `configuration.yaml`
```yaml
logger:
default: info
logs:
custom_components.xiaomi_cloud_map_extractor: debug
```
## Special thanks
This integration wouldn't exist without following projects:
- [openHAB miIO add-on](https://github.com/openhab/openhab-addons/tree/main/bundles/org.openhab.binding.miio/src/main/java/org/openhab/binding/miio) by [@marcelrv](https://github.com/marcelrv)
- [valeCLOUDo](https://github.com/Xento/valeCLOUDo) by [@Xento](https://github.com/Xento)
- [Xiaomi Robot Vacuum Protocol](https://github.com/marcelrv/XiaomiRobotVacuumProtocol) by [@marcelrv](https://github.com/marcelrv)
- [Valetudo](https://github.com/Hypfer/Valetudo) by [@Hypfer](https://github.com/Hypfer)
## Support
If you want to support my work with a donation you can use one of the following platforms:
Platform
Payment methods
Link
Comment
Ko-fi

buycoffee.to

PayPal
Revolut

[ko_fi_shield]: https://img.shields.io/static/v1.svg?label=%20&message=Ko-Fi&color=F16061&logo=ko-fi&logoColor=white
[ko_fi]: https://ko-fi.com/piotrmachowski
[buycoffee_to_shield]: https://shields.io/badge/buycoffee.to-white?style=flat&labelColor=white&logo=data:image/png;base64,iVBORw0KGgoAAAANSUhEUgAAABAAAAAQCAYAAAAf8/9hAAABhmlDQ1BJQ0MgcHJvZmlsZQAAKJF9kT1Iw1AUhU9TpaIVh1YQcchQnayIijhKFYtgobQVWnUweemP0KQhSXFxFFwLDv4sVh1cnHV1cBUEwR8QVxcnRRcp8b6k0CLGC4/3cd49h/fuA4R6malmxzigapaRisfEbG5FDLzChxB6MIZ+iZl6Ir2QgWd93VM31V2UZ3n3/Vm9St5kgE8knmW6YRGvE09vWjrnfeIwK0kK8TnxqEEXJH7kuuzyG+eiwwLPDBuZ1BxxmFgstrHcxqxkqMRTxBFF1ShfyLqscN7irJarrHlP/sJgXltOc53WEOJYRAJJiJBRxQbKsBClXSPFRIrOYx7+QcefJJdMrg0wcsyjAhWS4wf/g9+zNQuTE25SMAZ0vtj2xzAQ2AUaNdv+PrbtxgngfwautJa/UgdmPkmvtbTIEdC3DVxctzR5D7jcAQaedMmQHMlPSygUgPcz+qYcELoFulfduTXPcfoAZGhWSzfAwSEwUqTsNY93d7XP7d+e5vx+AIahcq//o+yoAAAABmJLR0QA/wD/AP+gvaeTAAAACXBIWXMAAAsTAAALEwEAmpwYAAAAB3RJTUUH5wETCy4vFNqLzwAAAVpJREFUOMvd0rFLVXEYxvHPOedKJnKJhrDLuUFREULE7YDCMYj+AydpsCWiaKu29hZxiP4Al4aWwC1EdFI4Q3hqEmkIBI8ZChWXKNLLvS0/Qcza84V3enm/7/s878t/HxGkeTaIGziP+EB918nawu7Dq1d0e1+2J2bepnk2jFEUVVF+qKV51o9neBCaugfge70keoxxUbSWjrQ+4SUyzKZ5NlnDZdzGG7w4DIh+dtZEFntDA98l8S0MYwctNGrYz9WqKJePFLq80g5Sr+EHlnATp+NA+4qLaZ7FfzMrzbMBjGEdq8GrJMZnvAvFC/8wfAwjWMQ8XmMzaW9sdevNRgd3MFhvNpbaG1u/Dk2/hOc4gadVUa7Um425qii/7Z+xH9O4jwW8Cqv24Tru4hyeVEU588cfBMgpPMI9nMFe0BkFzVOYrYqycyQgQJLwTC2cDZCPeF8V5Y7jGb8BUpRicy7OU5MAAAAASUVORK5CYII=
[buycoffee_to]: https://buycoffee.to/piotrmachowski
[buy_me_a_coffee_shield]: https://img.shields.io/static/v1.svg?label=%20&message=Buy%20me%20a%20coffee&color=6f4e37&logo=buy%20me%20a%20coffee&logoColor=white
[buy_me_a_coffee]: https://www.buymeacoffee.com/PiotrMachowski
[paypal_me_shield]: https://img.shields.io/static/v1.svg?label=%20&message=PayPal.Me&logo=paypal
[paypal_me]: https://paypal.me/PiMachowski
[revolut_me_shield]: https://img.shields.io/static/v1.svg?label=%20&message=Revolut&logo=revolut
[revolut_me]: https://revolut.me/314ma