Ecosyste.ms: Awesome
An open API service indexing awesome lists of open source software.
https://github.com/dvlab-research/VoxelNeXt
VoxelNeXt: Fully Sparse VoxelNet for 3D Object Detection and Tracking (CVPR 2023)
https://github.com/dvlab-research/VoxelNeXt
3d-multi-object-tracking 3d-object-detection argoverse autonomous-driving lidar nuscenes waymo-open-dataset
Last synced: 10 days ago
JSON representation
VoxelNeXt: Fully Sparse VoxelNet for 3D Object Detection and Tracking (CVPR 2023)
- Host: GitHub
- URL: https://github.com/dvlab-research/VoxelNeXt
- Owner: dvlab-research
- License: apache-2.0
- Created: 2023-03-16T08:55:59.000Z (over 1 year ago)
- Default Branch: master
- Last Pushed: 2023-06-03T07:08:08.000Z (about 1 year ago)
- Last Synced: 2024-03-13T00:35:21.325Z (4 months ago)
- Topics: 3d-multi-object-tracking, 3d-object-detection, argoverse, autonomous-driving, lidar, nuscenes, waymo-open-dataset
- Language: Python
- Homepage: https://arxiv.org/abs/2303.11301
- Size: 7.63 MB
- Stars: 620
- Watchers: 8
- Forks: 49
- Open Issues: 27
-
Metadata Files:
- Readme: README.md
- License: LICENSE
Lists
- awesome-stars - dvlab-research/VoxelNeXt - VoxelNeXt: Fully Sparse VoxelNet for 3D Object Detection and Tracking (CVPR 2023) (Python)
README
[](https://paperswithcode.com/sota/3d-object-detection-on-argoverse2?p=voxelnext-fully-sparse-voxelnet-for-3d-object-1)
[](https://paperswithcode.com/sota/3d-multi-object-tracking-on-nuscenes-lidar?p=voxelnext-fully-sparse-voxelnet-for-3d-object-1)
# VoxelNeXt: Fully Sparse VoxelNet for 3D Object Detection and Tracking (CVPR 2023)
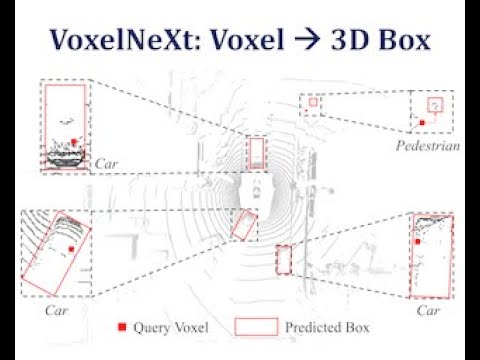
This is the official implementation of ***VoxelNeXt*** (CVPR 2023). VoxelNeXt is a clean, simple, and fully-sparse 3D object detector. The core idea is to predict objects directly upon sparse voxel features. No sparse-to-dense conversion, anchors, or center proxies are needed anymore.
For more details, please refer to:
**VoxelNeXt: Fully Sparse VoxelNet for 3D Object Detection and Tracking [[Paper](https://arxiv.org/abs/2303.11301)]**
[Yukang Chen](https://scholar.google.com/citations?user=6p0ygKUAAAAJ&hl=en), [Jianhui Liu](https://scholar.google.com/citations?user=n1JW-jYAAAAJ&hl=en), [Xiangyu Zhang](https://scholar.google.com/citations?user=yuB-cfoAAAAJ&hl=zh-CN), [Xiaojuan Qi](https://scholar.google.com/citations?user=bGn0uacAAAAJ&hl=en), [Jiaya Jia](https://scholar.google.com/citations?user=XPAkzTEAAAAJ&hl=en)

## News
- [2023-04-23] We update the [Argoverse2 dataset code](https://github.com/dvlab-research/VoxelNeXt/blob/master/pcdet/datasets/argo2/argo2_dataset.py). For Argoverse2, [document](https://github.com/dvlab-research/VoxelNeXt/blob/master/docs/GETTING_STARTED.md#argoverse2-dataset) and the [pre-train weight](https://drive.google.com/file/d/1YP2UOz-yO-cWfYQkIqILEu6bodvCBVrR/view?usp=share_link) are updated.
- [2023-04-19] We merged VoxelNeXt into [Grounded-Segment-Anything](https://github.com/IDEA-Research/Grounded-Segment-Anything).
- [2023-04-16] We released an [example config file](https://github.com/dvlab-research/VoxelNeXt/blob/master/tools/cfgs/kitti_models/voxelnext.yaml) to train VoxelNeXt on KITTI.
- [2023-04-14] We combine VoxelNeXt and [Segment Anything](https://github.com/facebookresearch/segment-anything) in [3D-Box-Segment-Anything](https://github.com/dvlab-research/3D-Box-Segment-Anything). It extends [Segment Anything](https://github.com/facebookresearch/segment-anything) to 3D perception and enables promptable 3D object detection.
- [2023-04-03] VoxelNeXt is merged into the official [OpenPCDet](https://github.com/open-mmlab/OpenPCDet) codebase.
- [2023-01-28] VoxelNeXt achieved the SOTA performance on the Argoverse2 3D object detection.
- [2022-11-11] VoxelNeXt achieved 1st on the nuScenes LiDAR tracking leaderboard.
### Experimental results
| nuScenes Detection | Set | mAP | NDS | Download |
|---------------|:----:|:----:|:----:|:-----------:|
| [VoxelNeXt](tools/cfgs/nuscenes_models/cbgs_voxel0075_voxelnext.yaml) | val | 60.5 | 66.6 | [Pre-trained](https://drive.google.com/file/d/1IV7e7G9X-61KXSjMGtQo579pzDNbhwvf/view?usp=share_link) |
| [VoxelNeXt](tools/cfgs/nuscenes_models/cbgs_voxel0075_voxelnext.yaml) | test | 64.5 | 70.0 | [Submission](https://drive.google.com/file/d/1wNVjxyTuCE3F88GT_TZSgBgdmkA61Fsi/view?usp=share_link) |
| [+double-flip](tools/cfgs/nuscenes_models/cbgs_voxel0075_voxelnext_doubleflip.yaml) | test | 66.2 | 71.4 | [Submission](https://drive.google.com/file/d/1sSkLBrWGm_rMB73cNHojGyQtz-hLBBTH/view?usp=share_link) |
| nuScenes Tracking | Set | AMOTA | AMOTP | Download |
|---------------|:----:|:----:|:----:|:-----------:|
| [VoxelNeXt](tools/cfgs/nuscenes_models/cbgs_voxel0075_voxelnext.yaml) | val | 70.2 | 64.0 | [Results](https://drive.google.com/file/d/1_9maBWKJ3oDdUMBB_ee76Cq34GJoGyBx/view?usp=share_link) |
| [VoxelNeXt](tools/cfgs/nuscenes_models/cbgs_voxel0075_voxelnext.yaml) | test | 69.5 | 56.8 | [Submission](https://drive.google.com/file/d/1gq-vz5ix_aw4IPc0N3To15IS-bLa1b50/view?usp=share_link) |
| [+double-flip](tools/cfgs/nuscenes_models/cbgs_voxel0075_voxelnext_doubleflip.yaml) | test | 71.0 | 51.1 | [Submission](https://drive.google.com/file/d/1wg4Iica6WbPp_NrNoXI3-J1-ggQ2_cW3/view?usp=share_link) |
| Argoverse2 | mAP | Download |
|---------------------------------------------|:----------:|:-------:|
| [VoxelNeXt](tools/cfgs/argo2_models/cbgs_voxel01_voxelnext.yaml) | 30.5 | [Pre-trained](https://drive.google.com/file/d/1YP2UOz-yO-cWfYQkIqILEu6bodvCBVrR/view?usp=share_link) |
| Waymo | Vec_L1 | Vec_L2 | Ped_L1 | Ped_L2 | Cyc_L1 | Cyc_L2 |
|---------------------------------------------|:----------:|:-------:|:-------:|:-------:|:-------:|:-------:|
| [VoxelNeXt-2D](tools/cfgs/waymo_models/voxelnext2d_ioubranch.yaml) | 77.94/77.47 |69.68/69.25 |80.24/73.47 |72.23/65.88 |73.33/72.20 |70.66/69.56 |
| [VoxelNeXt-K3](tools/cfgs/waymo_models/voxelnext_ioubranch_large.yaml) | 78.16/77.70 |69.86/69.42 |81.47/76.30 |73.48/68.63 |76.06/74.90 |73.29/72.18 |
- We cannot release the pre-trained models of VoxelNeXt on Waymo dataset due to the [license of WOD](https://waymo.com/open/terms).
- For Waymo dataset, VoxelNeXt-K3 is an enhanced version of VoxelNeXt with larger model size.
- During inference, VoxelNeXt can work either with [sparse-max-pooling](tools/cfgs/nuscenes_models/cbgs_voxel0075_voxelnext_maxpool.yaml) or NMS post-processing. Please install our implemented [spconv-plus](https://github.com/dvlab-research/spconv-plus), if you want to use the sparse-max-pooling inference. Otherwise, please use NMS post-processing by default.

## Getting Started
### Installation
#### a. Clone this repository
```shell
https://github.com/dvlab-research/VoxelNeXt && cd VoxelNeXt
```
#### b. Install the environment
Following the install documents for [OpenPCDet](docs/INSTALL.md).
#### c. Prepare the datasets.
For nuScenes, Waymo, and Argoverse2 datasets, please follow the [document](https://github.com/open-mmlab/OpenPCDet/blob/master/docs/GETTING_STARTED.md) in OpenPCDet.
### Evaluation
We provide the trained weight file so you can just run with that. You can also use the model you trained.
```shell
cd tools
bash scripts/dist_test.sh NUM_GPUS --cfg_file PATH_TO_CONFIG_FILE --ckpt PATH_TO_MODEL
#For example,
bash scripts/dist_test.sh 8 --cfg_file PATH_TO_CONFIG_FILE --ckpt PATH_TO_MODEL
```
### Training
```shell
bash scripts/dist_train.sh NUM_GPUS --cfg_file PATH_TO_CONFIG_FILE
#For example,
bash scripts/dist_train.sh 8 --cfg_file PATH_TO_CONFIG_FILE
```
## Citation
If you find this project useful in your research, please consider citing:
```
@inproceedings{chen2023voxenext,
title={VoxelNeXt: Fully Sparse VoxelNet for 3D Object Detection and Tracking},
author={Yukang Chen and Jianhui Liu and Xiangyu Zhang and Xiaojuan Qi and Jiaya Jia},
booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition},
year={2023}
}
```
An introduction video on YouTube can be found here.
[]([VoxelNeXt](https://www.youtube.com/watch?v=sXw71BCGWEo) "VoxelNeXt: Fully Sparse VoxelNet for 3D Object Detection and Tracking (CVPR 2023)")
## Acknowledgement
- This work is built upon the [OpenPCDet](https://github.com/open-mmlab/OpenPCDet) and [spconv](https://github.com/traveller59/spconv).
- This work is motivated by [FSD](https://arxiv.org/abs/2207.10035). And we follow FSD for the Argoverse2 data processing.
## Our Works in LiDAR-based Autonumous Driving
- **VoxelNeXt (CVPR 2023)** [[Paper]](https://arxiv.org/abs/2303.11301) [[Code]](https://github.com/dvlab-research/VoxelNeXt) Fully Sparse VoxelNet for 3D Object Detection and Tracking.
- **Focal Sparse Conv (CVPR 2022 Oral)** [[Paper]](https://arxiv.org/abs/2204.12463) [[Code]](https://github.com/dvlab-research/FocalsConv) Dynamic sparse convolution for high performance.
- **Spatial Pruned Conv (NeurIPS 2022)** [[Paper]](https://arxiv.org/abs/2209.14201) [[Code]](https://github.com/CVMI-Lab/SPS-Conv) 50% FLOPs saving for efficient 3D object detection.
- **LargeKernel3D (CVPR 2023)** [[Paper]](https://arxiv.org/abs/2206.10555) [[Code]](https://github.com/dvlab-research/LargeKernel3D) Large-kernel 3D sparse CNN backbone.
- **SphereFormer (CVPR 2023)** [[Paper]](https://arxiv.org/abs/2303.12766) [[Code]](https://github.com/dvlab-research/SphereFormer) Spherical window 3D transformer backbone.
- [spconv-plus](https://github.com/dvlab-research/spconv-plus) A library where we combine our works into [spconv](https://github.com/traveller59/spconv).
- [SparseTransformer](https://github.com/dvlab-research/SparseTransformer) A library that includes high-efficiency transformer implementations for sparse point cloud or voxel data.
## License
This project is released under the [Apache 2.0 license](LICENSE).