https://github.com/HuangCongQing/linefit_ground_segmentation_details
快速3D点云分割论文代码(带注解):Fast segmentation of 3d point clouds for ground vehicles
https://github.com/HuangCongQing/linefit_ground_segmentation_details
3d-point-clouds ground-segmentation lidar pcl ros ros-melodic
Last synced: 8 months ago
JSON representation
快速3D点云分割论文代码(带注解):Fast segmentation of 3d point clouds for ground vehicles
- Host: GitHub
- URL: https://github.com/HuangCongQing/linefit_ground_segmentation_details
- Owner: HuangCongQing
- License: bsd-3-clause
- Created: 2021-01-28T03:38:56.000Z (almost 5 years ago)
- Default Branch: main
- Last Pushed: 2024-08-29T16:18:40.000Z (about 1 year ago)
- Last Synced: 2025-03-17T15:11:25.967Z (8 months ago)
- Topics: 3d-point-clouds, ground-segmentation, lidar, pcl, ros, ros-melodic
- Language: C++
- Homepage:
- Size: 3 MB
- Stars: 82
- Watchers: 2
- Forks: 10
- Open Issues: 0
-
Metadata Files:
- Readme: README.md
- License: LICENSE
Awesome Lists containing this project
README
# linefit_ground_segmentation_details
快速3D点云分割论文代码(带注解):Fast segmentation of 3d point clouds for ground vehicles
Implementation of the ground segmentation algorithm proposed in
```
@inproceedings{himmelsbach2010fast,
title={Fast segmentation of 3d point clouds for ground vehicles},
author={Himmelsbach, Michael and Hundelshausen, Felix V and Wuensche, H-J},
booktitle={Intelligent Vehicles Symposium (IV), 2010 IEEE},
pages={560--565},
year={2010},
organization={IEEE}
}
```
参考:https://github.com/lorenwel/linefit_ground_segmentation
**相关算法(带中文详细注解):https://github.com/HuangCongQing/plane_fit_ground_filter**
@[双愚](https://github.com/HuangCongQing/) , 若fork或star请注明来源
### Intro
个人笔记已更新到知识星球:https://t.zsxq.com/0fsic6p29
Plus: 本人创建知识星球 **【自动驾驶感知(PCL/ROS+DL)】** 专注于自动驾驶感知领域,包括传统方法(PCL点云库,ROS)和深度学习(目标检测+语义分割)方法。同时涉及Apollo,Autoware(基于ros2),BEV感知,三维重建,SLAM(视觉+激光雷达) ,模型压缩(蒸馏+剪枝+量化等),自动驾驶模拟仿真,自动驾驶数据集标注&数据闭环等自动驾驶全栈技术,欢迎扫码二维码加入,一起登顶自动驾驶的高峰!
更多自动驾驶相关交流群,欢迎扫码加入:[自动驾驶感知(PCL/ROS+DL):技术交流群汇总(新版)](https://mp.weixin.qq.com/s?__biz=MzI4OTY1MjA3Mg==&mid=2247486575&idx=1&sn=3145b7a5e9dda45595e1b51aa7e45171&chksm=ec2aa068db5d297efec6ba982d6a73d2170ef09a01130b7f44819b01de46b30f13644347dbf2#rd)
### Setup
##### Frameworks and Packages
Make sure you have the following is installed:
- [ROS Kinetic/Melodic](http://wiki.ros.org/melodic)
- [PCL 1.7.2](http://pointclouds.org/downloads/)
##### Dataset bag
数据集已处理好,放在百度网盘上,需要自己下载
* kitti_2011_09_26_drive_0005_synced.bag
* 链接: https://pan.baidu.com/s/1sYWHzF11RpyEW25cQ_iNGA 密码: b6pd
### 编译
将本仓库下的三个文件夹移动到catkin_wp/src下,然后执行下面操作
```shell
// 创建环境变量 src中运行
mkdir -p catkin_wp/src
cd catkin_wp/src
catkin_init_workspace
// 编译(需要回到工作空间catkin_wp)
cd ..
catkin_make // 产生build和devel文件夹
//设置环境变量,找到src里的功能包(每个新的shell窗口都要执行以下source devel/setup.bash)
source devel/setup.bash // 不同shell,不同哦.sh .zsh 通过设置gedit ~/.zshrc,不用每次都source
```
详情可参考:https://www.yuque.com/docs/share/e59d5c91-b46d-426a-9957-cd262f5fc241?# 《09.创建工作空间与功能包※※※》
### 修改配置文件
举例:修改输入topic
```bash
cd linefit_ground_segmentation/linefit_ground_segmentation_ros/launch/segmentation.launch
#第8行 修改你的雷达点云话题
```
### Run运行
主要代码路径:
linefit_ground_segmentation/linefit_ground_segmentation/src
* [linefit_ground_segmentation](linefit_ground_segmentation/linefit_ground_segmentation/src)
##### Terminal 1
```
roscore
```
##### Terminal 2
`--loop`循环
```
# kitti官方 注意修改路径path
rosbag play path/kitti_2011_09_26_drive_0005_synced.bag --loop
```
##### Terminal 3
```
rviz
```
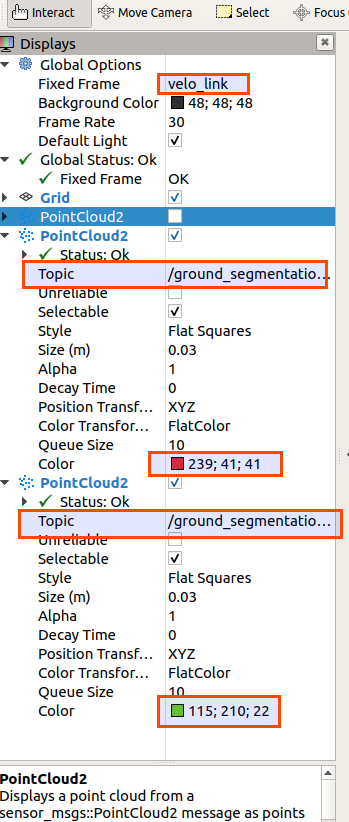
可使用此配置 `config.rviz`
注意:Fixed Frame: **velo_link**
##### Terminal 4
```
# 运行launch
roslaunch linefit_ground_segmentation_ros segmentation.launch
```
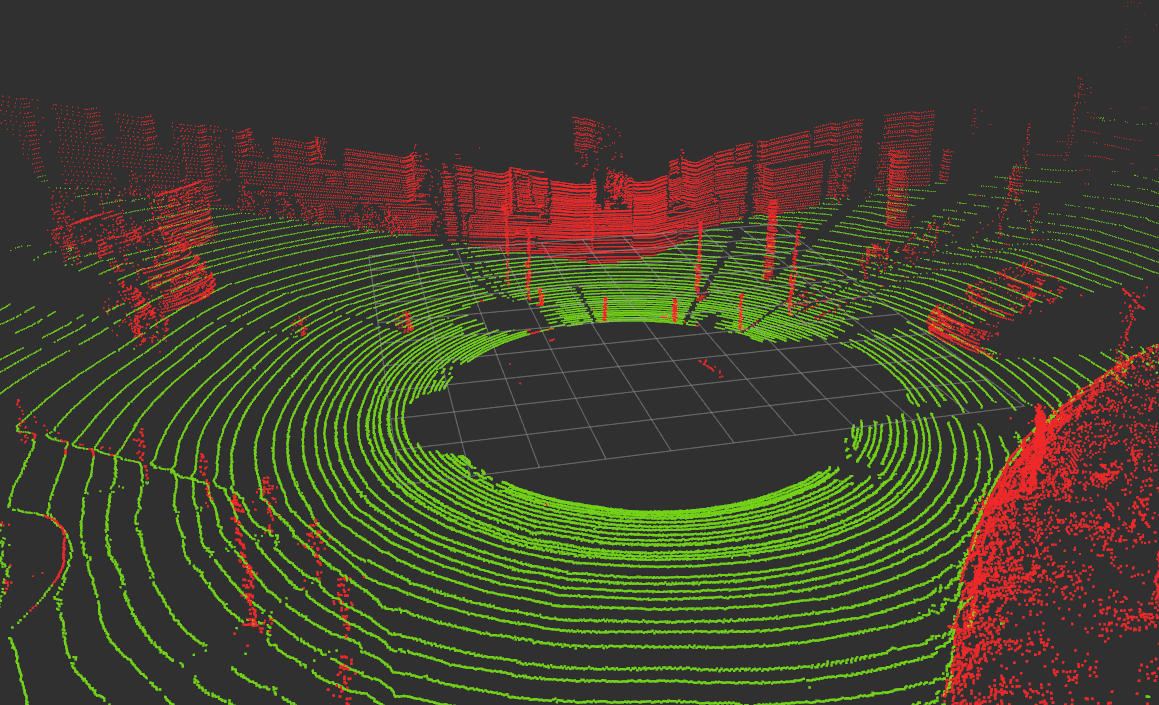
### Result
### Reference
* 项目代码:https://github.com/lorenwel/linefit_ground_segmentation
* 依赖1:git clone https://github.com/catkin/catkin_simple
* 依赖2:https://github.com/google/glog
* 注解:https://github.com/sysuzyc/road_detecting
* 论文:https://ieeexplore.ieee.org/stamp/stamp.jsp?arnumber=5548059&tag=1
### License
Copyright (c) [双愚](https://github.com/HuangCongQing/). All rights reserved.
Licensed under the [BSD 3-Clause License](./LICENSE) License.