https://github.com/JenningsL/PointRCNN
PointRCNN+Frustum Pointnet
https://github.com/JenningsL/PointRCNN
3d-object-detection pointcloud
Last synced: over 1 year ago
JSON representation
PointRCNN+Frustum Pointnet
- Host: GitHub
- URL: https://github.com/JenningsL/PointRCNN
- Owner: JenningsL
- Created: 2019-01-10T04:51:30.000Z (over 7 years ago)
- Default Branch: master
- Last Pushed: 2019-05-13T07:12:18.000Z (about 7 years ago)
- Last Synced: 2024-08-01T03:43:54.338Z (almost 2 years ago)
- Topics: 3d-object-detection, pointcloud
- Language: Python
- Homepage:
- Size: 2.02 MB
- Stars: 136
- Watchers: 7
- Forks: 25
- Open Issues: 8
-
Metadata Files:
- Readme: README.md
Awesome Lists containing this project
README
# PointRCNN
This is **not** the official implementation of PointRCNN. We add an image segmentation network to improve recall of point cloud segmentation. The 2-stage network is frustum pointNet. Any pull request is appreciated.
## Introduction
A 3D object detector that takes point cloud and RGB image(optional) as input.
## Results
[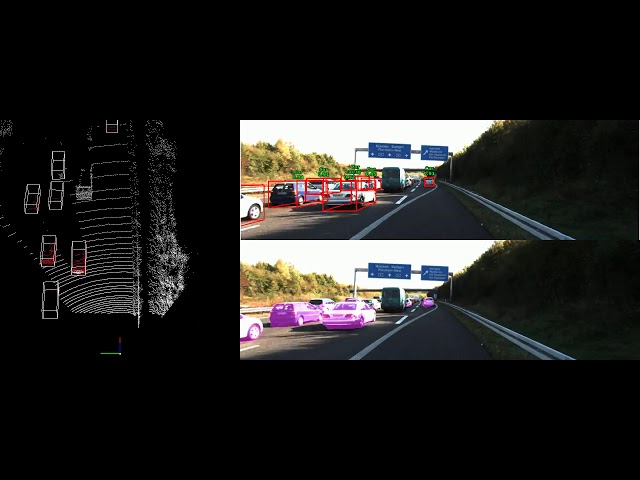](https://youtu.be/T-LzoQpt2N4)
[](https://youtu.be/CVSs2cEkKgk)
## Architecture
1. Perform foreground point segmentation on the whole point cloud
2. Output a 3D proposal box for every foreground point
3. Crop point cloud with proposal boxes and feed into the 2nd-stage classification and box refinement network

## Usage
### Dependencies
+ python2.7
+ tensorflow(1.10.0)
+ shapely
+ mayavi
+ opencv-python
+ Compile tensorflow operators for pointnet following to https://github.com/charlesq34/frustum-pointnets
### Data Preparation
For trainning and validation, download KITTI 3d object detection dataset, and put the folders as
```
dataset/KITTI/object/
training/
calib/
image_2/
label_2/
velodyne/
testing/
calib/
image_2/
velodyne/
```
For testing, download KITTI video sequence and calibration files, and put the folders as
```
2011_10_03/
calib_cam_to_cam.txt
calib_imu_to_velo.txt
calib_velo_to_cam.txt
image_02/
velodyne_points/
```
**[Optional] Scene Augmentation**
Our implementation also supports using augmented scene point cloud for training RPN, please refer to the official implementation of [PointRCNN](https://github.com/sshaoshuai/PointRCNN). After generating the data, just put the `aug_scene/` folder under `dataset/KITTI/object`. If you don't want to use it, just set `use_aug_scene=False` when using `rpn_dataset`.
**Image segmentaion annotation**
Our image segmentation network is DeelabV3+ official implementation. The senmantic segmentation annotation is obtained by the following steps:
+ Pointcloud completion using [ip_basic](https://github.com/kujason/ip_basic)
+ Project 3D points to image plane to get segmentation annotation
Codes for finetuning can be founded at [deeplab_kitti_object](https://github.com/JenningsL/deeplab_kitti_object). Or you can just use your own image segmentation network.
### Train
There are 3 sub-model to be trained.
**Region Proposal Network**
```
sh train_rpn.sh
```
**Frustum Pointnet**
Before training the 2-Stage Network, we need to save the output of RPN and Image Segmentaion Network to the disk first.
**Image Segmentation Network**
For now deeplabv3+ is used and finetune on KITTI 3D object dataset
### Evaluate
**Region Proposal Network**
```
sh test_rpn.sh
```
This will save the output of RPN and Image segmentation network to `./rcnn_data_train` for training the RCNN network.
**Frustum Pointnet**
```
test_frustum.sh
```
### Test
**End to end**
```
sh test.sh
```
## Evaluation
### Point cloud segmentation
| Method | Coverage | Recall | Precision |
| ---------- | -------- | ------ | --------- |
| Point Only | 89.7% | 93.4% | 82.2% |
| Point+Image| 93.5% | 97.0% | 76.6% |
Coverage means the percentage of object that have at least one point being detected.
### Recall of RPN
Setting: IoU >= 0.5, 100 proposal
| Method | 3 Classes Recall | Car moderate | Pedastrian Moderate | Cyclist Moderate |
| ---------- | ------------------- | ------------ | ------------------- | ---------------- |
| Point+Image| 89% | 96% | 77% | 52% |
### AP on Val Set
| Class | 3D mAP(Easy, Moderate, Hard) | BEV mAP(Easy, Moderate, Hard) |
| ---------- | ----------------------------- |--------------------------------|
| Car | 76.56 70.20 64.00 | 86.32 78.42 78.07 |
| Pedestrain | 70.23 63.09 55.77 | 73.34 65.86 57.94 |
| Cyclist | 76.89 50.91 50.28 | 78.27 59.00 51.63 |
## Pretrained Models
| Model | Link |
| ----- | ---- |
| RPN |[log_rpn.zip](https://drive.google.com/open?id=1xeBRkwGeF55O41_aht_ROB3wcwnCThHU)|
| Image SegNet |[log_rpn.zip](https://drive.google.com/open?id=1LhR5p1klFX36IV0hAb54q66pOIsWfTNw)|
| Frustum PointNet |[log_frustum.zip](https://drive.google.com/open?id=1K5cUgxwLvEDOKDkuYMbYPLa3FGbxGKr3)|
## Reference
- [Frustum PointNets for 3D Object Detection from RGB-D Data](https://arxiv.org/abs/1711.08488)
- [PointRCNN: 3D Object Proposal Generation and Detection from Point Cloud](https://arxiv.org/abs/1812.04244)