https://github.com/NVIDIA-ISAAC-ROS/isaac_ros_dnn_inference
NVIDIA-accelerated DNN model inference ROS 2 packages using NVIDIA Triton/TensorRT for both Jetson and x86_64 with CUDA-capable GPU
https://github.com/NVIDIA-ISAAC-ROS/isaac_ros_dnn_inference
ai deep-learning deeplearning dnn gpu jetson nvidia ros ros2 ros2-humble tao tensorrt tensorrt-inference triton triton-inference-server
Last synced: over 1 year ago
JSON representation
NVIDIA-accelerated DNN model inference ROS 2 packages using NVIDIA Triton/TensorRT for both Jetson and x86_64 with CUDA-capable GPU
- Host: GitHub
- URL: https://github.com/NVIDIA-ISAAC-ROS/isaac_ros_dnn_inference
- Owner: NVIDIA-ISAAC-ROS
- License: apache-2.0
- Created: 2021-10-13T23:06:48.000Z (almost 5 years ago)
- Default Branch: main
- Last Pushed: 2025-02-28T01:46:59.000Z (over 1 year ago)
- Last Synced: 2025-02-28T08:14:52.927Z (over 1 year ago)
- Topics: ai, deep-learning, deeplearning, dnn, gpu, jetson, nvidia, ros, ros2, ros2-humble, tao, tensorrt, tensorrt-inference, triton, triton-inference-server
- Language: C++
- Homepage: https://developer.nvidia.com/isaac-ros-gems
- Size: 405 KB
- Stars: 109
- Watchers: 4
- Forks: 16
- Open Issues: 14
-
Metadata Files:
- Readme: README.md
- Contributing: CONTRIBUTING.md
- License: LICENSE
Awesome Lists containing this project
README
# Isaac ROS DNN Inference
NVIDIA-accelerated DNN model inference ROS 2 packages using NVIDIA Triton/TensorRT for both Jetson and x86_64 with CUDA-capable GPU.


## Webinar Available
Learn how to use this package by watching our on-demand webinar:
[Accelerate YOLOv5 and Custom AI Models in ROS with NVIDIA Isaac](https://gateway.on24.com/wcc/experience/elitenvidiabrill/1407606/3998202/isaac-ros-webinar-series)
---
## Overview
Isaac ROS DNN Inference contains ROS 2 packages for performing DNN
inference, providing AI-based perception for robotics applications. DNN
inference uses a pre-trained DNN model to ingest an input Tensor and
output a prediction to an output Tensor.
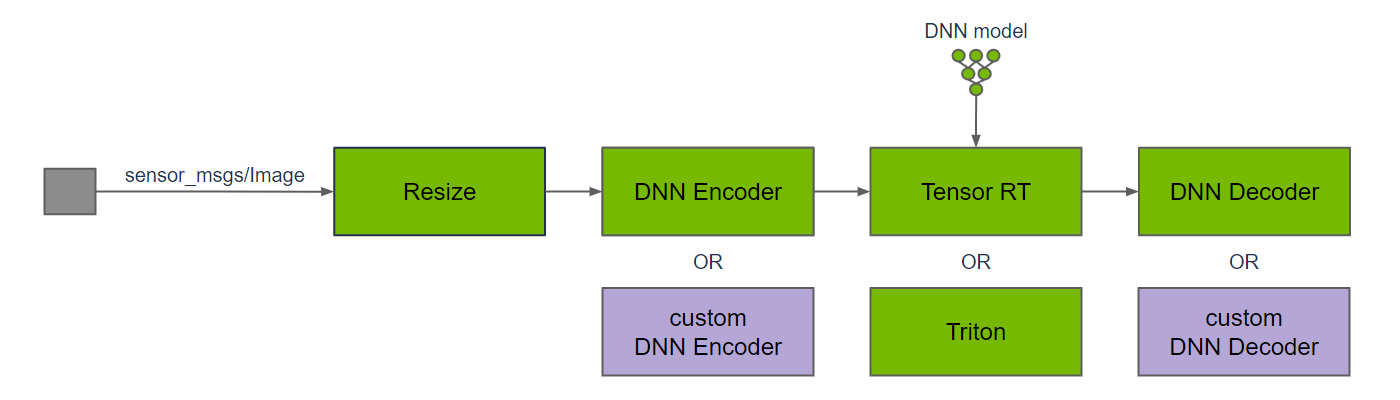
Above is a typical graph of nodes for DNN inference on image data. The
input image is resized to match the input resolution of the DNN; the
image resolution may be reduced to improve DNN inference performance
,which typically scales directly with the number of pixels in the image.
DNN inference requires input Tensors, so a DNN encoder node is used to
convert from an input image to Tensors, including any data
pre-processing that is required for the DNN model. Once DNN inference is
performed, the DNN decoder node is used to convert the output Tensors to
results that can be used by the application.
TensorRT and Triton are two separate ROS nodes to perform DNN inference.
The TensorRT node uses
[TensorRT](https://developer.nvidia.com/tensorrt) to provide
high-performance deep learning inference. TensorRT optimizes the DNN
model for inference on the target hardware, including Jetson and
discrete GPUs. It also supports specific operations that are commonly
used by DNN models. For newer or bespoke DNN models, TensorRT may not
support inference on the model. For these models, use the Triton node.
The Triton node uses the [Triton Inference
Server](https://developer.nvidia.com/nvidia-triton-inference-server),
which provides a compatible frontend supporting a combination of
different inference backends (e.g. ONNX Runtime, TensorRT Engine Plan,
TensorFlow, PyTorch). In-house benchmark results measure little
difference between using TensorRT directly or configuring Triton to use
TensorRT as a backend.
Some DNN models may require custom DNN encoders to convert the input
data to the Tensor format needed for the model, and custom DNN decoders
to convert from output Tensors into results that can be used in the
application. Leverage the DNN encoder and DNN decoder node(s) for image
bounding box detection and image segmentation, or your own custom
node(s).
> [!Note]
> DNN inference can be performed on different types of input
> data, including audio, video, text, and various sensor data, such as
> LIDAR, camera, and RADAR. This package provides implementations for
> DNN encode and DNN decode functions for images, which are commonly
> used for perception in robotics. The DNNs operate on Tensors for
> their input, output, and internal transformations, so the input image
> needs to be converted to a Tensor for DNN inferencing.
## Isaac ROS NITROS Acceleration
This package is powered by [NVIDIA Isaac Transport for ROS (NITROS)](https://developer.nvidia.com/blog/improve-perception-performance-for-ros-2-applications-with-nvidia-isaac-transport-for-ros/), which leverages type adaptation and negotiation to optimize message formats and dramatically accelerate communication between participating nodes.
## Performance
| Sample Graph
| Input Size
| AGX Orin
| Orin NX
| Orin Nano Super 8GB
| x86_64 w/ RTX 4090
|
|--------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------|--------------------------|--------------------------------------------------------------------------------------------------------------------------------------------------------------------------|-------------------------------------------------------------------------------------------------------------------------------------------------------------------------|-------------------------------------------------------------------------------------------------------------------------------------------------------------------------|---------------------------------------------------------------------------------------------------------------------------------------------------------------------------|
| [TensorRT Node](https://github.com/NVIDIA-ISAAC-ROS/isaac_ros_benchmark/blob/main/benchmarks/isaac_ros_tensor_rt_benchmark/scripts/isaac_ros_tensor_rt_dope_node.py)
DOPE
| VGA
| [30.8 fps](https://github.com/NVIDIA-ISAAC-ROS/isaac_ros_benchmark/blob/main/results/isaac_ros_tensor_rt_dope_node-agx_orin.json)
37 ms @ 30Hz
| [15.5 fps](https://github.com/NVIDIA-ISAAC-ROS/isaac_ros_benchmark/blob/main/results/isaac_ros_tensor_rt_dope_node-orin_nx.json)
55 ms @ 30Hz
| [20.8 fps](https://github.com/NVIDIA-ISAAC-ROS/isaac_ros_benchmark/blob/main/results/isaac_ros_tensor_rt_dope_node-orin_nano.json)
51 ms @ 30Hz
| [298 fps](https://github.com/NVIDIA-ISAAC-ROS/isaac_ros_benchmark/blob/main/results/isaac_ros_tensor_rt_dope_node-x86-4090.json)
5.3 ms @ 30Hz
|
| [Triton Node](https://github.com/NVIDIA-ISAAC-ROS/isaac_ros_benchmark/blob/main/benchmarks/isaac_ros_triton_benchmark/scripts/isaac_ros_triton_dope_node.py)
DOPE
| VGA
| [31.2 fps](https://github.com/NVIDIA-ISAAC-ROS/isaac_ros_benchmark/blob/main/results/isaac_ros_triton_dope_node-agx_orin.json)
340 ms @ 30Hz
| [15.5 fps](https://github.com/NVIDIA-ISAAC-ROS/isaac_ros_benchmark/blob/main/results/isaac_ros_triton_dope_node-orin_nx.json)
55 ms @ 30Hz
| [22.2 fps](https://github.com/NVIDIA-ISAAC-ROS/isaac_ros_benchmark/blob/main/results/isaac_ros_triton_dope_node-orin_nano.json)
490 ms @ 30Hz
| [277 fps](https://github.com/NVIDIA-ISAAC-ROS/isaac_ros_benchmark/blob/main/results/isaac_ros_triton_dope_node-x86-4090.json)
4.7 ms @ 30Hz
|
| [TensorRT Node](https://github.com/NVIDIA-ISAAC-ROS/isaac_ros_benchmark/blob/main/benchmarks/isaac_ros_tensor_rt_benchmark/scripts/isaac_ros_tensor_rt_ps_node.py)
PeopleSemSegNet
| 544p
| [489 fps](https://github.com/NVIDIA-ISAAC-ROS/isaac_ros_benchmark/blob/main/results/isaac_ros_tensor_rt_ps_node-agx_orin.json)
4.6 ms @ 30Hz
| [258 fps](https://github.com/NVIDIA-ISAAC-ROS/isaac_ros_benchmark/blob/main/results/isaac_ros_tensor_rt_ps_node-orin_nx.json)
7.1 ms @ 30Hz
| [269 fps](https://github.com/NVIDIA-ISAAC-ROS/isaac_ros_benchmark/blob/main/results/isaac_ros_tensor_rt_ps_node-orin_nano.json)
6.2 ms @ 30Hz
| [619 fps](https://github.com/NVIDIA-ISAAC-ROS/isaac_ros_benchmark/blob/main/results/isaac_ros_tensor_rt_ps_node-x86-4090.json)
2.2 ms @ 30Hz
|
| [Triton Node](https://github.com/NVIDIA-ISAAC-ROS/isaac_ros_benchmark/blob/main/benchmarks/isaac_ros_triton_benchmark/scripts/isaac_ros_triton_ps_node.py)
PeopleSemSegNet
| 544p
| [216 fps](https://github.com/NVIDIA-ISAAC-ROS/isaac_ros_benchmark/blob/main/results/isaac_ros_triton_ps_node-agx_orin.json)
5.5 ms @ 30Hz
| [143 fps](https://github.com/NVIDIA-ISAAC-ROS/isaac_ros_benchmark/blob/main/results/isaac_ros_triton_ps_node-orin_nx.json)
8.2 ms @ 30Hz
| –
| [585 fps](https://github.com/NVIDIA-ISAAC-ROS/isaac_ros_benchmark/blob/main/results/isaac_ros_triton_ps_node-x86-4090.json)
2.5 ms @ 30Hz
|
| [DNN Image Encoder Node](https://github.com/NVIDIA-ISAAC-ROS/isaac_ros_benchmark/blob/main/benchmarks/isaac_ros_dnn_image_encoder_benchmark/scripts/isaac_ros_dnn_image_encoder_node.py)
| VGA
| [339 fps](https://github.com/NVIDIA-ISAAC-ROS/isaac_ros_benchmark/blob/main/results/isaac_ros_dnn_image_encoder_node-agx_orin.json)
13 ms @ 30Hz
| [375 fps](https://github.com/NVIDIA-ISAAC-ROS/isaac_ros_benchmark/blob/main/results/isaac_ros_dnn_image_encoder_node-orin_nx.json)
12 ms @ 30Hz
| –
| [480 fps](https://github.com/NVIDIA-ISAAC-ROS/isaac_ros_benchmark/blob/main/results/isaac_ros_dnn_image_encoder_node-x86-4090.json)
6.0 ms @ 30Hz
|
---
## Documentation
Please visit the [Isaac ROS Documentation](https://nvidia-isaac-ros.github.io/repositories_and_packages/isaac_ros_dnn_inference/index.html) to learn how to use this repository.
---
## Packages
* [`isaac_ros_dnn_image_encoder`](https://nvidia-isaac-ros.github.io/repositories_and_packages/isaac_ros_dnn_inference/isaac_ros_dnn_image_encoder/index.html)
* [Migration Guide](https://nvidia-isaac-ros.github.io/repositories_and_packages/isaac_ros_dnn_inference/isaac_ros_dnn_image_encoder/index.html#migration-guide)
* [API](https://nvidia-isaac-ros.github.io/repositories_and_packages/isaac_ros_dnn_inference/isaac_ros_dnn_image_encoder/index.html#api)
* [`isaac_ros_tensor_proc`](https://nvidia-isaac-ros.github.io/repositories_and_packages/isaac_ros_dnn_inference/isaac_ros_tensor_proc/index.html)
* [API](https://nvidia-isaac-ros.github.io/repositories_and_packages/isaac_ros_dnn_inference/isaac_ros_tensor_proc/index.html#api)
* [`isaac_ros_tensor_rt`](https://nvidia-isaac-ros.github.io/repositories_and_packages/isaac_ros_dnn_inference/isaac_ros_tensor_rt/index.html)
* [Quickstart](https://nvidia-isaac-ros.github.io/repositories_and_packages/isaac_ros_dnn_inference/isaac_ros_tensor_rt/index.html#quickstart)
* [Troubleshooting](https://nvidia-isaac-ros.github.io/repositories_and_packages/isaac_ros_dnn_inference/isaac_ros_tensor_rt/index.html#troubleshooting)
* [API](https://nvidia-isaac-ros.github.io/repositories_and_packages/isaac_ros_dnn_inference/isaac_ros_tensor_rt/index.html#api)
* [`isaac_ros_triton`](https://nvidia-isaac-ros.github.io/repositories_and_packages/isaac_ros_dnn_inference/isaac_ros_triton/index.html)
* [Quickstart](https://nvidia-isaac-ros.github.io/repositories_and_packages/isaac_ros_dnn_inference/isaac_ros_triton/index.html#quickstart)
* [Troubleshooting](https://nvidia-isaac-ros.github.io/repositories_and_packages/isaac_ros_dnn_inference/isaac_ros_triton/index.html#troubleshooting)
* [API](https://nvidia-isaac-ros.github.io/repositories_and_packages/isaac_ros_dnn_inference/isaac_ros_triton/index.html#api)
## Latest
Update 2024-12-10: Update to be compatible with JetPack 6.1