https://github.com/PRBonn/MapMOS
Building Volumetric Beliefs for Dynamic Environments Exploiting Map-Based Moving Object Segmentation (RAL 2023)
https://github.com/PRBonn/MapMOS
cloud deep-learning map minkowski-engine minkowskiengine mos moving object point point-cloud segmentation static
Last synced: 9 months ago
JSON representation
Building Volumetric Beliefs for Dynamic Environments Exploiting Map-Based Moving Object Segmentation (RAL 2023)
- Host: GitHub
- URL: https://github.com/PRBonn/MapMOS
- Owner: PRBonn
- License: mit
- Created: 2023-08-03T09:20:46.000Z (almost 3 years ago)
- Default Branch: main
- Last Pushed: 2025-08-26T08:24:46.000Z (11 months ago)
- Last Synced: 2025-09-05T08:53:02.618Z (11 months ago)
- Topics: cloud, deep-learning, map, minkowski-engine, minkowskiengine, mos, moving, object, point, point-cloud, segmentation, static
- Language: Python
- Homepage: https://www.ipb.uni-bonn.de/pdfs/mersch2023ral.pdf
- Size: 126 KB
- Stars: 169
- Watchers: 8
- Forks: 10
- Open Issues: 0
-
Metadata Files:
- Readme: README.md
- License: LICENSE
- Citation: CITATION.cff
Awesome Lists containing this project
README
Building Volumetric Beliefs for Dynamic Environments Exploiting Map-Based Moving Object Segmentation




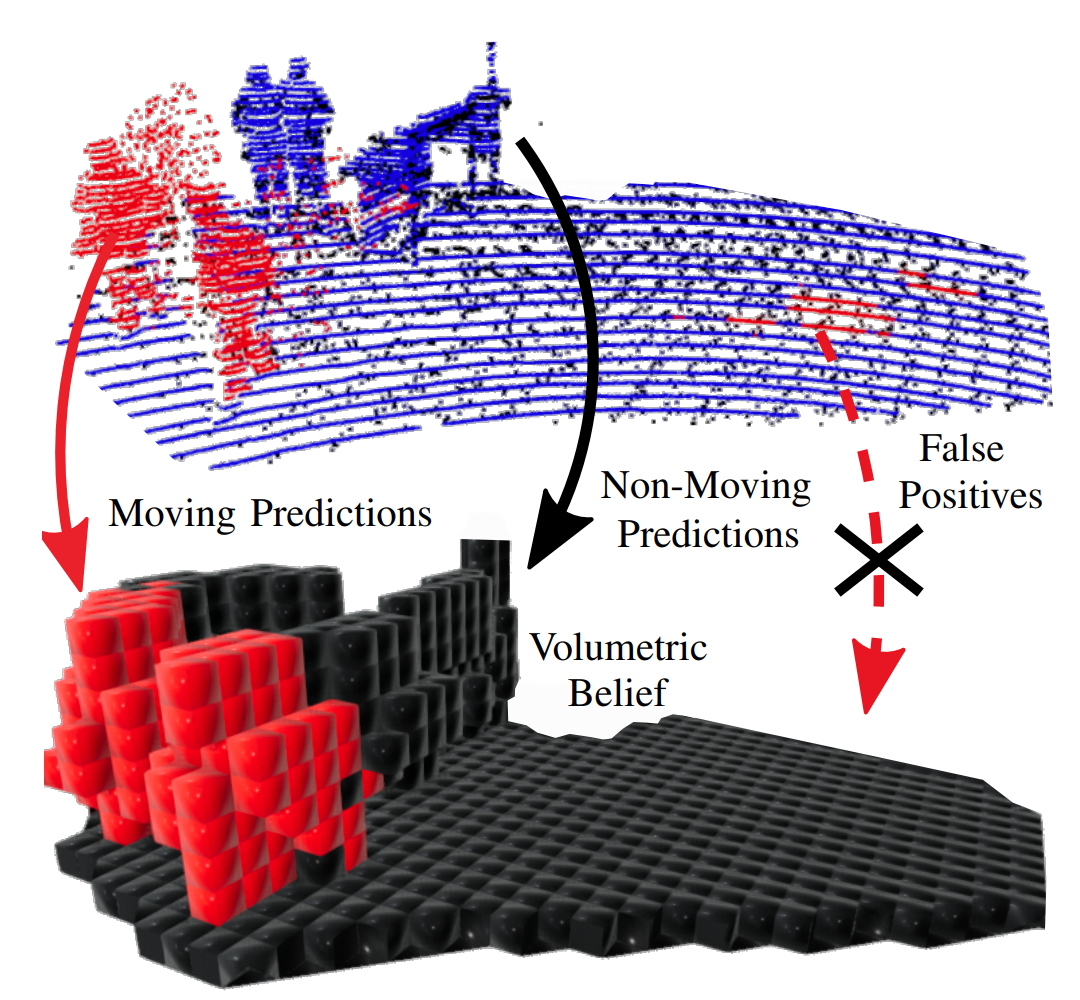
Our approach identifies moving objects in the current scan (blue points) and the local map (black points) of the environment and maintains a volumetric belief map representing the dynamic environment.
Click here for qualitative results!
[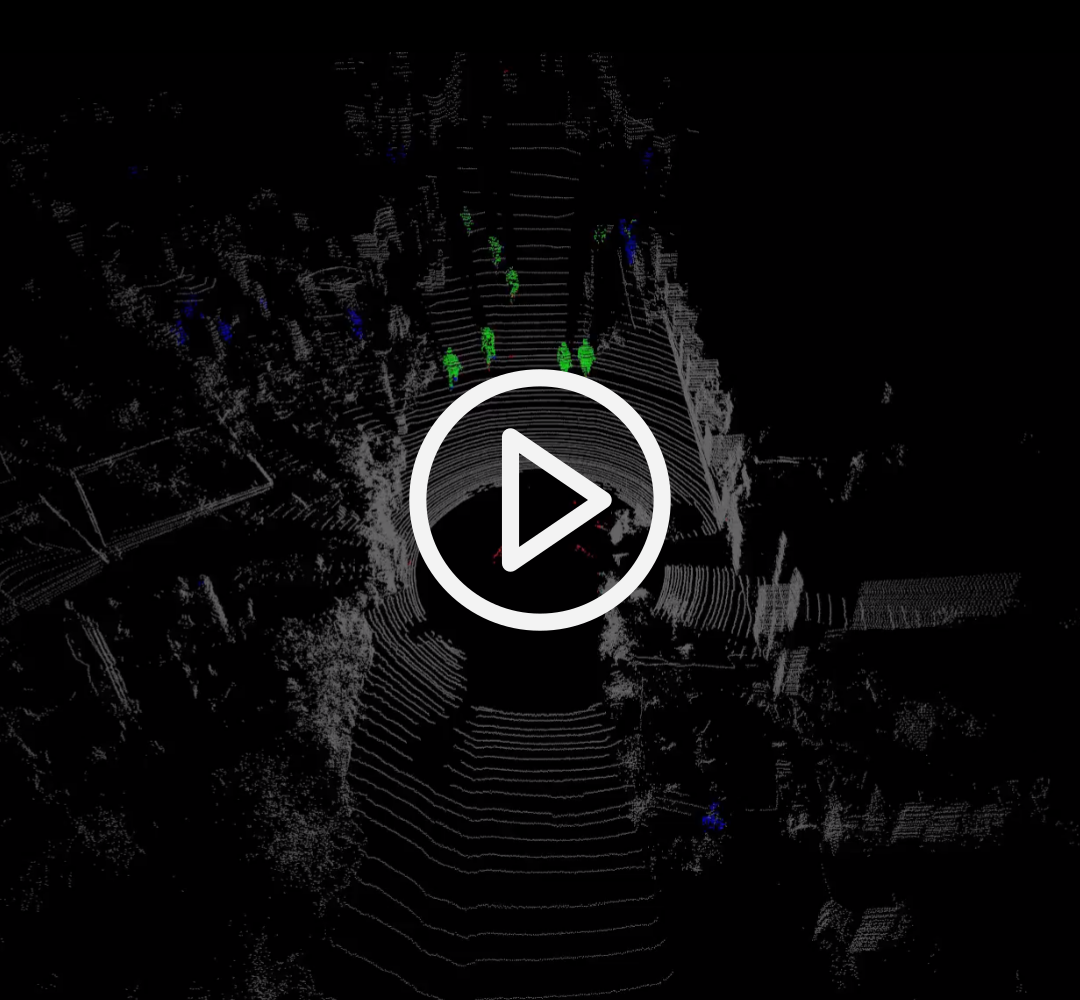](https://github.com/PRBonn/MapMOS/assets/38326482/04c7e5a2-dd44-431a-95b0-c42d5605078a)
Our predictions for the KITTI Tracking sequence 19 with true positives (green), false positives (red), and false negatives (blue).
## Installation
First, make sure the [MinkowskiEngine](https://github.com/NVIDIA/MinkowskiEngine) is installed on your system, see [here](https://github.com/NVIDIA/MinkowskiEngine#installation) for more details.
Next, clone our repository
```bash
git clone git@github.com:PRBonn/MapMOS && cd MapMOS
```
and install with
```bash
make install
```
**or**
```bash
make install-all
```
if you want to install the project with all optional dependencies (needed for the visualizer). In case you want to edit the Python code, install in editable mode:
```bash
make editable
```
## How to Use It
Just type
```bash
mapmos_pipeline --help
```
to see how to run MapMOS.
This is what you should see
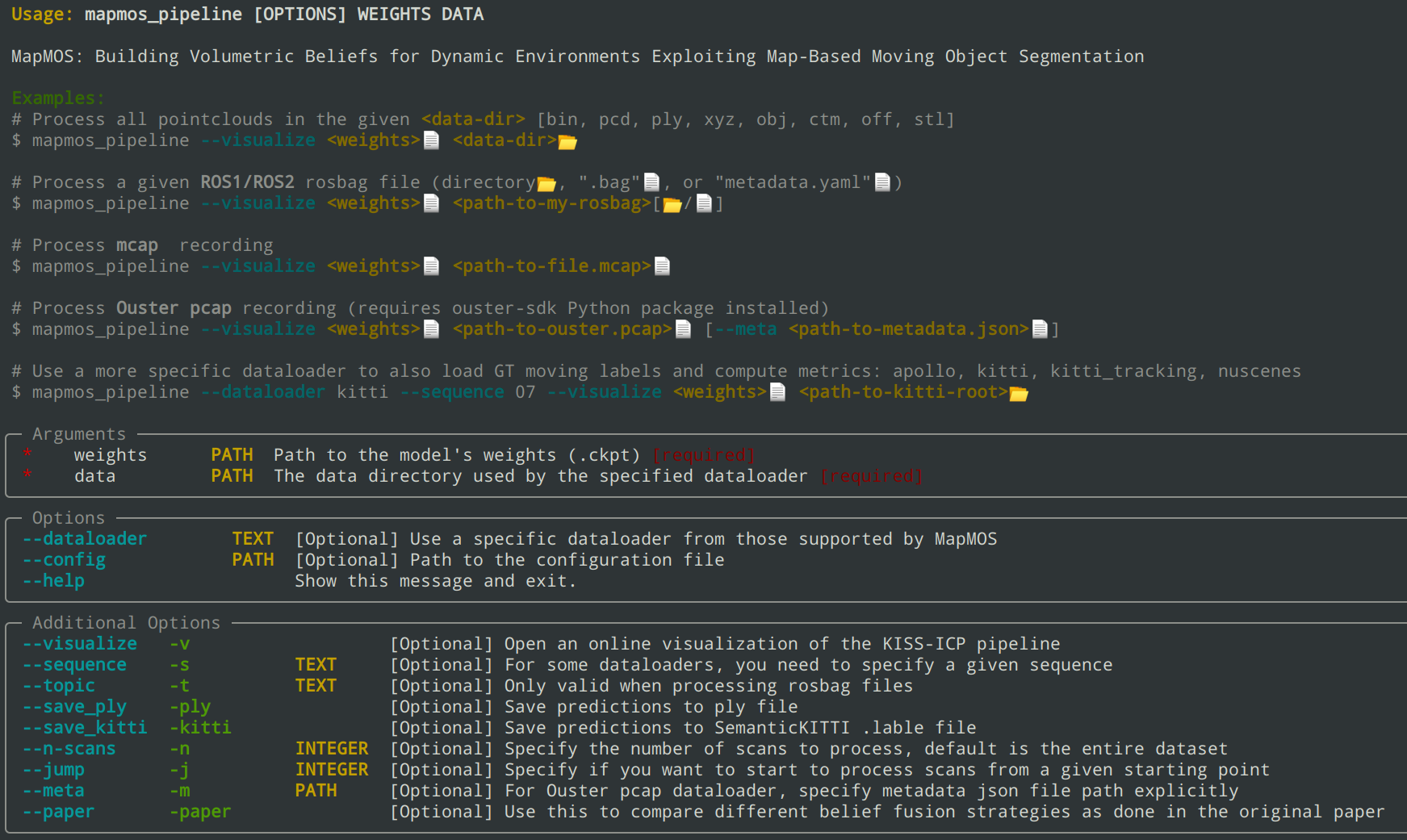
Check the [Download](#downloads) section for a pre-trained model. Like [KISS-ICP](https://github.com/PRBonn/kiss-icp), our pipeline runs on a variety of point cloud data formats like `bin`, `pcd`, `ply`, `xyz`, `rosbags`, and more. To visualize these, just type
```bash
mapmos_pipeline --visualize /path/to/weights.ckpt /path/to/data
```
Want to evaluate with ground truth labels?
Because these labels come in all shapes, you need to specify a dataloader. This is currently available for SemanticKITTI, NuScenes, HeLiMOS, and our labeled KITTI Tracking sequence 19 and Apollo sequences (see [Downloads](#downloads)).
Want to reproduce the results from the paper?
For reproducing the results of the paper, you need to pass the corresponding config file. They will make sure that the de-skewing option and the maximum range are set properly. To compare different map fusion strategies from our paper, just pass the `--paper` flag to the `mapmos_pipeline`.
## Training
To train our approach, you need to first cache your data. To see how to do that, just `cd` into the `MapMOS` repository and type
```bash
python3 scripts/precache.py --help
```
After this, you can run the training script. Again, `--help` shows you how:
```bash
python3 scripts/train.py --help
```
Want to verify the cached data?
You can inspect the cached training samples by using the script `python3 scripts/cache_to_ply.py --help`.
Want to change the logging directory?
The training log and checkpoints will be saved by default to the current working directory. To change that, export the `export LOGS=/your/path/to/logs` environment variable before running the training script.
## HeLiMOS
We provide additional training and evaluation data for different sensor types in our [HeLiMOS paper](https://www.ipb.uni-bonn.de/pdfs/lim2024iros.pdf). To train on the HeLiMOS data, use the following commands:
```shell
python3 scripts/precache.py /path/to/HeLiMOS helimos /path/to/cache --config config/helimos/*_training.yaml
python3 scripts/train.py /path/to/HeLiMOS helimos /path/to/cache --config config/helimos/*_training.yaml
```
by replacing the paths and the config file names. To evaluate for example on the Velodyne test data, run
```shell
mapmos_pipeline /path/to/weights.ckpt /path/to/HeLiMOS --dataloader helimos -s Velodyne/test.txt --config config/helimos/inference.yaml
```
Note that our sequence `-s` encodes both the sensor type `Velodyne` and split `test.txt`, just replace these with `Ouster`, `Aeva`, or `Avia` and/or `train.txt` or `val.txt` to run MapMOS on different sensors and/or splits.
## Downloads
You can download the post-processed and labeled [Apollo dataset](https://www.ipb.uni-bonn.de/html/projects/apollo_dataset/LiDAR-MOS.zip) and [KITTI Tracking sequence 19](https://www.ipb.uni-bonn.de/html/projects/kitti-tracking/post-processed/kitti-tracking.zip) from our website.
The [weights](https://www.ipb.uni-bonn.de/html/projects/MapMOS/mapmos.ckpt) of our pre-trained model can be downloaded as well.
## Publication
If you use our code in your academic work, please cite the corresponding [paper](https://www.ipb.uni-bonn.de/pdfs/mersch2023ral.pdf):
```bibtex
@article{mersch2023ral,
author = {B. Mersch and T. Guadagnino and X. Chen and I. Vizzo and J. Behley and C. Stachniss},
title = {{Building Volumetric Beliefs for Dynamic Environments Exploiting Map-Based Moving Object Segmentation}},
journal = {IEEE Robotics and Automation Letters (RA-L)},
volume = {8},
number = {8},
pages = {5180--5187},
year = {2023},
issn = {2377-3766},
doi = {10.1109/LRA.2023.3292583},
codeurl = {https://github.com/PRBonn/MapMOS},
}
```
## Acknowledgments
This implementation is heavily inspired by [KISS-ICP](https://github.com/PRBonn/kiss-icp).
## License
This project is free software made available under the MIT License. For details see the LICENSE file.