https://github.com/afska/gba-link-connection
🔗 A set of Game Boy Advance (GBA) C++ libraries to interact with the Serial Port. Its main purpose is to provide multiplayer support to homebrew games.
https://github.com/afska/gba-link-connection
adapter cable gameboy-advance gba gpio homebrew homebrew-games link multiboot multiplayer serial serialport spi uart wireless wireless-adapter
Last synced: 5 months ago
JSON representation
🔗 A set of Game Boy Advance (GBA) C++ libraries to interact with the Serial Port. Its main purpose is to provide multiplayer support to homebrew games.
- Host: GitHub
- URL: https://github.com/afska/gba-link-connection
- Owner: afska
- License: mit
- Created: 2020-10-25T15:08:19.000Z (over 5 years ago)
- Default Branch: master
- Last Pushed: 2025-08-18T09:33:52.000Z (10 months ago)
- Last Synced: 2025-08-18T11:28:11.204Z (10 months ago)
- Topics: adapter, cable, gameboy-advance, gba, gpio, homebrew, homebrew-games, link, multiboot, multiplayer, serial, serialport, spi, uart, wireless, wireless-adapter
- Language: C++
- Homepage:
- Size: 9.65 MB
- Stars: 230
- Watchers: 8
- Forks: 6
- Open Issues: 0
-
Metadata Files:
- Readme: README.md
- License: LICENSE
Awesome Lists containing this project
- awesome-gbadev - gba-link-connection
README
# gba-link-connection
A set of Game Boy Advance (GBA) C++ libraries to interact with the Serial Port. Its main purpose is to provide multiplayer support to homebrew games. [C bindings](#c-bindings) are also included for compatibility.
- [👾](#-LinkCable) [LinkCable.hpp](lib/LinkCable.hpp): The classic 16-bit **Multi-Play mode** (up to 4 players) using a GBA Link Cable!
- [💻](#-LinkCableMultiboot) [LinkCableMultiboot.hpp](lib/LinkCableMultiboot.hpp): Send **Multiboot software** (small 256KiB ROMs) to other GBAs with no cartridge!
- [🔧👾](#-LinkRawCable) [LinkRawCable.hpp](lib/LinkRawCable.hpp): A **minimal** low-level API for the 16-bit Multi-Play mode.
- [📻](#-LinkWireless) [LinkWireless.hpp](lib/LinkWireless.hpp): Connect up to 5 consoles with the **Wireless Adapter**!
- [📡](#-LinkWirelessMultiboot) [LinkWirelessMultiboot.hpp](lib/LinkWirelessMultiboot.hpp): Send Multiboot software (small 256KiB ROMs) to other GBAs **over the air**!
- [🔧📻](#-LinkRawWireless) [LinkRawWireless.hpp](lib/LinkRawWireless.hpp): A **minimal** low-level API for the Wireless Adapter.
- [🔧🏛️](#-LinkWirelessOpenSDK) [LinkWirelessOpenSDK.hpp](lib/LinkWirelessOpenSDK.hpp): An abstraction of the **official** software level protocol of the Wireless Adapter.
- [🌎](#-LinkUniversal) [LinkUniversal.hpp](lib/LinkUniversal.hpp): Add multiplayer support to your game, both with 👾 _Link Cables_ and 📻 _Wireless Adapters_, using the **same API**!
- [🔌](#-LinkGPIO) [LinkGPIO.hpp](lib/LinkGPIO.hpp): Use the Link Port however you want to control **any device** (like LEDs, rumble motors, and that kind of stuff)!
- [🔗](#-LinkSPI) [LinkSPI.hpp](lib/LinkSPI.hpp): Connect with a PC (like a **Raspberry Pi**) or another GBA (with a GBC Link Cable) using this mode. Transfer up to 2Mbit/s!
- [⏱️](#%EF%B8%8F-LinkUART) [LinkUART.hpp](lib/LinkUART.hpp): Easily connect to **any PC** using a USB to UART cable!
- [🟪](#-LinkCube) [LinkCube.hpp](lib/LinkCube.hpp): Exchange data with a _Wii_ or a _GameCube_ using the classic **Joybus** protocol!
- [💳](#-LinkCard) [LinkCard.hpp](lib/LinkCard.hpp): Receive **DLCs** in the form of _e-Reader_ cards!
- [📱](#-LinkMobile) [LinkMobile.hpp](lib/LinkMobile.hpp): Connect to **the internet** using the _Mobile Adapter GB_, brought back to life thanks to the [REON](https://github.com/REONTeam) project!
- [📺](#-LinkIR) [LinkIR.hpp](lib/LinkIR.hpp): Turn down the volume of your **neighbor's TV** using the _Infrared Adapter_!
- [🖱️](#%EF%B8%8F-LinkPS2Mouse) [LinkPS2Mouse.hpp](lib/LinkPS2Mouse.hpp): Connect a **PS/2 mouse** to the GBA for extended controls!
- [⌨️](#%EF%B8%8F-LinkPS2Keyboard) [LinkPS2Keyboard.hpp](lib/LinkPS2Keyboard.hpp): Connect a **PS/2 keyboard** to the GBA for extended controls!
_(click on the emojis for documentation)_
>  Created by [[r]labs](https://r-labs.io).
Created by [[r]labs](https://r-labs.io).
> 💬 Check out my other GBA projects: [piuGBA](https://github.com/afska/piugba), [beat-beast](https://github.com/afska/beat-beast), [gba-remote-play](https://github.com/afska/gba-remote-play), [gba-flashcartio](https://github.com/afska/gba-flashcartio).
## Usage
- Copy the contents of the [lib/](lib/) folder into a directory that is part of your project's include path. Then, `#include` the library you need, such as [LinkCable.hpp](lib/LinkCable.hpp), in your project. No external dependencies are required.
- For initial instructions and setup details, refer to the large comment block at the beginning of each file, the documentation included here, and the provided examples.
- Check out the [examples/](examples/) folder.
- **Compiled ROMs are available** in [Releases](https://github.com/afska/gba-link-connection/releases).
- The example code uses [libtonc](https://github.com/gbadev-org/libtonc) (and [libugba](https://github.com/AntonioND/libugba) for interrupts), but any library can be used.
- The examples can be tested on real GBAs or using emulators.
- The [LinkUniversal_real](https://github.com/afska/gba-link-universal-real) ROM tests a more real scenario using an audio player, a background video, text and sprites.
- The `LinkCableMultiboot_demo` and `LinkWirelessMultiboot_demo` examples can bootstrap all other examples, allowing you to test with multiple units even if you only have one flashcart.
- Check out the [FAQ](https://github.com/afska/gba-link-connection/wiki#-faq).
> The files use some compiler extensions, so using **GCC** is required.
> The example ROMs were compiled with [devkitARM](https://devkitpro.org), using GCC `14.1.0` with `-std=c++17` as the standard and `-Ofast` as the optimization level.
> To learn implementation details, you might also want to check out the [docs/](docs/) folder, which contains important documentation.
### Compiling the examples
Running `./compile.sh` builds all the examples with the right configuration.
The project must be in a path without spaces; _devkitARM_ and some \*nix commands are required.
All the projects understand these Makefile actions:
```bash
make [ clean | build | start | rebuild | restart ]
```
Alternatively, you can compile the examples using Docker:
```bash
cd examples
./compile.sh docker
```
### C bindings
- To use the libraries in a C project, include the files from the [lib/c_bindings/](lib/c_bindings/) directory.
- For documentation, use this `README.md` file or comments inside the main C++ files.
- Some libraries may not be available in C.
- Some methods/overloads may not be available in the C implementations.
- Unlike the main libraries, C bindings depend on _libtonc_.
```cpp
// Instantiating
LinkSomething* linkSomething = new LinkSomething(a, b); // C++
LinkSomethingHandle cLinkSomething = C_LinkSomething_create(a, b); // C
// Calling methods
linkSomething->method(a, b); // C++
C_LinkSomething_method(cLinkSomething, a, b); // C
// Destroying
delete linkSomething; // C++
C_LinkSomething_destroy(cLinkSomething); // C
```
# 👾 LinkCable
_(aka Multi-Play Mode)_
[⬆️](#gba-link-connection) This is the Link Port mode that games use for multiplayer.
The library uses message queues to send/receive data and transmits when it's possible. As it uses CPU interrupts, the connection is alive even if a console drops a frame or gets stuck in a long iteration loop. After such an event, all nodes end up receiving all the pending messages.

## Constructor
`new LinkCable(...)` accepts these **optional** parameters:
| Name | Type | Default | Description |
| ------------- | -------------- | ----------------------- | ------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------ |
| `baudRate` | **BaudRate** | `BaudRate::BAUD_RATE_1` | Sets a specific baud rate. |
| `timeout` | **u32** | `3` | Maximum number of _frames_ without receiving data from other player before marking them as disconnected or resetting the connection. |
| `interval` | **u16** | `50` | Number of _1024-cycle ticks_ (61.04μs) between transfers _(50 = 3.052ms)_. It's the interval of Timer #`sendTimerId`.
Lower values will transfer faster but also consume more CPU. You can use `Link::perFrame(...)` to convert from _transfers per frame_ to _interval values_. |
| `sendTimerId` | **u8** _(0~3)_ | `3` | GBA Timer to use for sending. |
You can update these values at any time without creating a new instance:
- Call `deactivate()`.
- Mutate the `config` property.
- Call `activate()`.
## Methods
| Name | Return type | Description |
| --------------------------- | -------------- | ----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- |
| `isActive()` | **bool** | Returns whether the library is active or not. |
| `activate()` | - | Activates the library. |
| `deactivate()` | - | Deactivates the library. |
| `isConnected()` | **bool** | Returns `true` if there are at least 2 connected players. |
| `playerCount()` | **u8** _(1~4)_ | Returns the number of connected players. |
| `currentPlayerId()` | **u8** _(0~3)_ | Returns the current player ID. |
| `sync()` | - | Collects available messages from interrupts for later processing with `read(...)`. Call this method whenever you need to fetch new data, and always process all the messages before calling it again. |
| `waitFor(playerId)` | **bool** | Waits for data from player #`playerId`. Returns `true` on success, or `false` on disconnection. |
| `waitFor(playerId, cancel)` | **bool** | Like `waitFor(playerId)`, but accepts a `cancel()` function. The library will continuously invoke it, and abort the wait if it returns `true`. |
| `canRead(playerId)` | **bool** | Returns `true` if there are pending messages from player #`playerId`.
Keep in mind that if this returns `false`, it will keep doing so until you _fetch new data_ with `sync()`. |
| `read(playerId)` | **u16** | Dequeues and returns the next message from player #`playerId`. If there's no data from that player, a `0` will be returned. |
| `peek(playerId)` | **u16** | Returns the next message from player #`playerId` without dequeuing it. If there's no data from that player, a `0` will be returned. |
| `canSend()` | **bool** | Returns whether a `send(...)` call would fail due to the queue being full or not. |
| `send(data)` | **bool** | Sends `data` to all connected players. If `data` is invalid or the send queue is full, a `false` will be returned. |
| `didQueueOverflow([clear])` | **bool** | Returns whether the internal queue lost messages at some point due to being full. This can happen if your queue size is too low, if you receive too much data without calling `sync(...)` enough times, or if you don't `read(...)` enough messages before the next `sync()` call.
After this call, the overflow flag is cleared if `clear` is `true` (default behavior). |
| `resetTimeout()` | - | Resets other players' timeout count to `0`. Call this before reducing `config.timeout`. |
| `resetTimer()` | - | Restarts the send timer without disconnecting. Call this if you changed `config.interval` |
⚠️ `0xFFFF` and `0x0` are reserved values, so don't send them!
## Compile-time constants
- `LINK_CABLE_QUEUE_SIZE`: to set a custom buffer size (how many incoming and outgoing messages the queues can store at max **per player**). The default value is `15`, which seems fine for most games.
- This affects how much memory is allocated. With the default value, it's around `390` bytes. There's a double-buffered pending queue (to avoid data races), `1` incoming queue and `1` outgoing queue.
- You can approximate the memory usage with:
- `(LINK_CABLE_QUEUE_SIZE * sizeof(u16) * LINK_CABLE_MAX_PLAYERS) * 3 + LINK_CABLE_QUEUE_SIZE * sizeof(u16)` <=> `LINK_CABLE_QUEUE_SIZE * 26`
# 💻 LinkCableMultiboot
_(aka Multiboot through Multi-Play Mode)_
[⬆️](#gba-link-connection) This tool allows sending Multiboot ROMs (small 256KiB programs that fit in EWRAM) from one GBA to up to 3 slaves, using a single cartridge.
Its demo (`LinkCableMultiboot_demo`) has all the other gba-link-connection ROMs bundled with it, so it can be used to quickly test the library.

## Sync version
This version is simpler and blocks the system thread until completion. It doesn't require interrupt service routines.
### Methods
| Name | Return type | Description |
| --------------------------------------- | ----------- | -------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- |
| `sendRom(rom, romSize, cancel, [mode])` | **Result** | Sends the `rom` (must be 4-byte aligned). During the handshake process, the library will continuously invoke `cancel`, and abort the transfer if it returns `true`.
The `romSize` must be a number between `448` and `262144`, and a multiple of `16`.
The `mode` can be either `LinkCableMultiboot::TransferMode::MULTI_PLAY` for GBA cable (default value) or `LinkCableMultiboot::TransferMode::SPI` for GBC cable.
Once completed, the return value should be `LinkCableMultiboot::Result::SUCCESS`. |
⚠️ stop DMA before sending the ROM! _(you might need to stop your audio player)_
⚠️ this restriction only applies to the sync version!
### Compile-time constants
- `LINK_CABLE_MULTIBOOT_PALETTE_DATA`: to control how the logo is displayed.
- Format: `0b1CCCDSS1`, where `C`=color, `D`=direction, `S`=speed.
- Default: `0b10010011`.
## Async version
This version (`LinkCableMultiboot::Async`) allows more advanced use cases like playing animations and/or audio during the transfers, displaying the number of connected players and send percentage, and marking the transfer as 'ready' to start. It requires adding the provided interrupt service routines. The class is polymorphic with `LinkWirelessMultiboot::Async`.
### Constructor
`new LinkCableMultiboot::Async(...)` accepts these **optional** parameters:
| Name | Type | Default | Description |
| -------------------- | ---------------- | -------------------------- | --------------------------------------------------------------------------------------------------------------------------------------------- |
| `waitForReadySignal` | **bool** | `false` | Whether the code should wait for a `markReady()` call to start the actual transfer. |
| `mode` | **TransferMode** | `TransferMode::MULTI_PLAY` | Either `LinkCableMultiboot::TransferMode::MULTI_PLAY` for GBA cable (default value) or `LinkCableMultiboot::TransferMode::SPI` for GBC cable. |
You can update these values at any time without creating a new instance by mutating the `config` property. Keep in mind that the changes won't be applied after the next `sendRom(...)` call.
### Methods
| Name | Return type | Description |
| ---------------------------- | ----------------- | ------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------ |
| `sendRom(rom, romSize)` | **bool** | Sends the `rom` (must be 4-byte aligned).
The `romSize` must be a number between `448` and `262144`, and a multiple of `16`.
Once completed, `getState()` should return `LinkCableMultiboot::Async::State::STOPPED` and `getResult()` should return `LinkCableMultiboot::Async::GeneralResult::SUCCESS`.
Returns `false` if there's a pending transfer or the data is invalid. |
| `reset()` | **bool** | Deactivates the library, canceling the in-progress transfer, if any. |
| `isSending()` | **bool** | Returns whether there's an active transfer or not. |
| `getState()` | **State** | Returns the current state. |
| `getResult([clear])` | **GeneralResult** | Returns the result of the last operation.
After this call, the result is cleared if `clear` is `true` (default behavior). |
| `getDetailedResult([clear])` | **Result** | Returns the detailed result of the last operation.
After this call, the result is cleared if `clear` is `true` (default behavior). |
| `playerCount()` | **u8** _(1~4)_ | Returns the number of connected players. |
| `getPercentage()` | **u32** _(0~100)_ | Returns the completion percentage. |
| `isReady()` | **bool** | Returns whether the ready mark is active or not.
This is only useful when using the `waitForReadySignal` parameter. |
| `markReady()` | **bool** | Marks the transfer as ready.
This is only useful when using the `waitForReadySignal` parameter. |
⚠️ never call `reset()` inside an interrupt handler!
### Compile-time constants
- `LINK_CABLE_MULTIBOOT_ASYNC_DISABLE_NESTED_IRQ`: to disable nested IRQs. In the async version, SERIAL IRQs can be interrupted (once they clear their time-critical needs) by default, which helps prevent issues with audio engines. However, if something goes wrong, you can disable this behavior.
# 🔧👾 LinkRawCable
[⬆️](#gba-link-connection)
- This is a minimal hardware wrapper designed for the _Multi-Play mode_.
- It doesn't include any of the features of [👾 LinkCable](#-LinkCable), so it's not well suited for games.
- Its demo (`LinkRawCable_demo`) can help emulator developers in enhancing accuracy.
## Methods
| Name | Return type | Description |
| ---------------------------------- | -------------- | --------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- |
| `isActive()` | **bool** | Returns whether the library is active or not. |
| `activate(baudRate = BAUD_RATE_3)` | - | Activates the library in a specific `baudRate` (`LinkRawCable::BaudRate`). |
| `deactivate()` | - | Deactivates the library. |
| `transfer(data)` | **Response** | Exchanges `data` with the connected consoles. Returns the received data, including the assigned player ID. |
| `transfer(data, cancel)` | **Response** | Like `transfer(data)`, but accepts a `cancel()` function. The library will continuously invoke it, and abort the transfer if it returns `true`. |
| `transferAsync(data)` | - | Schedules a `data` transfer and returns. After this, call `getAsyncState()` and `getAsyncData()`.
Note that until you retrieve the async data, normal `transfer(...)`s won't do anything! |
| `getAsyncState()` | **AsyncState** | Returns the state of the last async transfer (one of `LinkRawCable::AsyncState::IDLE`, `LinkRawCable::AsyncState::WAITING`, or `LinkRawCable::AsyncState::READY`). |
| `getAsyncData()` | **Response** | If the async state is `READY`, returns the remote data and switches the state back to `IDLE`. If not, returns an empty response. |
| `getBaudRate()` | **BaudRate** | Returns the current `baudRate`. |
| `isMaster()` | **bool** | Returns whether the console is connected as master or not. Returns garbage when the cable is not properly connected. |
| `isReady()` | **bool** | Returns whether all connected consoles have entered the multiplayer mode. Returns garbage when the cable is not properly connected. |
⚠️ advanced usage only; if you're building a game, use `LinkCable`!
⚠️ don't send `0xFFFF`, it's a reserved value that means _disconnected client_!
⚠️ only `transfer(...)` if `isReady()`!
# 📻 LinkWireless
_(aka GBA Wireless Adapter)_
[⬆️](#gba-link-connection) This is a driver for an accessory that enables wireless games up to 5 players. The inner workings of the adapter are highly unknown, but [this blog post](docs/wireless_adapter.md) is very helpful. I've updated it to add more details about the things I learned by means of ~~reverse engineering~~ brute force and trial&error.
The library, by default, implements a lightweight protocol (on top of the adapter's message system) that sends packet IDs and checksums. This allows detecting disconnections, forwarding messages to all nodes, and retransmitting to prevent packet loss.
https://github.com/afska/gba-link-connection/assets/1631752/7eeafc49-2dfa-4902-aa78-57b391720564
## Constructor
`new LinkWireless(...)` accepts these **optional** parameters:
| Name | Type | Default | Description |
| ---------------- | -------------- | ------- | -------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- |
| `forwarding` | **bool** | `true` | If `true`, the server forwards all messages to the clients. Otherwise, clients only see messages sent from the server (ignoring other peers). |
| `retransmission` | **bool** | `true` | If `true`, the library handles retransmission for you, so there should be no packet loss. |
| `maxPlayers` | **u8** _(2~5)_ | `5` | Maximum number of allowed players. |
| `timeout` | **u32** | `10` | Maximum number of _frames_ without receiving data from other player before resetting the connection. |
| `interval` | **u16** | `75` | Number of _1024-cycle ticks_ (61.04μs) between transfers _(75 = 4.578ms)_. It's the interval of Timer #`sendTimerId`. Lower values will transfer faster but also consume more CPU. You can use `Link::perFrame(...)` to convert from _transfers per frame_ to _interval values_. |
| `sendTimerId` | **u8** _(0~3)_ | `3` | GBA Timer to use for sending. |
You can update these values at any time without creating a new instance:
- Call `deactivate()`.
- Mutate the `config` property.
- Call `activate()`.
## Methods
- Most of these methods return a boolean, indicating if the action was successful. If not, you can call `getLastError()` to know the reason. Usually, unless it's a trivial error (like buffers being full), the connection with the adapter is reset and the game needs to start again.
- You can check the connection state at any time with `getState()`.
- Until a session starts, all actions are synchronous.
- During sessions (when the state is `SERVING` or `CONNECTED`), the message transfers are IRQ-driven, so `send(...)` and `receive(...)` won't waste extra cycles. Though there are some synchronous methods that can be called during a session:
- `serve(...)`, to update the broadcast data.
- `closeServer()`, to make it the room unavailable for new players.
- `getSignalLevel(...)`, to retrieve signal levels.
| Name | Return type | Description |
| -------------------------------------------- | -------------- | ---------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- |
| `isActive()` | **bool** | Returns whether the library is active or not. |
| `activate()` | **bool** | Activates the library. When an adapter is connected, it changes the state to `AUTHENTICATED`. It can also be used to disconnect or reset the adapter. |
| `restoreExistingConnection()` | **bool** | Restores the state from an existing connection on the Wireless Adapter hardware.
This is useful, for example, after a fresh launch of a Multiboot game, to synchronize the library with the current state and avoid a reconnection.
Returns whether the restoration was successful. On success, the state should be either `SERVING` or `CONNECTED`.
This should be used as a replacement for `activate()`. |
| `deactivate([turnOff])` | **bool** | Puts the adapter into a low consumption mode and then deactivates the library. It returns a boolean indicating whether the transition to low consumption mode was successful.
You can disable the transition and deactivate directly by setting `turnOff` to `true`. |
| `serve([gameName], [userName], [gameId])` | **bool** | Starts broadcasting a server and changes the state to `SERVING`.
You can, optionally, provide a `gameName` (max `14` characters), a `userName` (max `8` characters), and a `gameId` _(0 ~ 0x7FFF)_ that games will be able to read. The strings must be null-terminated character arrays.
If the adapter is already serving, this method only updates the broadcast data. Updating broadcast data while serving can fail if the adapter is busy. In that case, this will return `false` and `getLastError()` will be `BUSY_TRY_AGAIN`. |
| `closeServer()` | **bool** | Closes the server while keeping the session active, to prevent new users from joining the room. This action can fail if the adapter is busy. In that case, this will return `false` and `getLastError()` will be `BUSY_TRY_AGAIN`. |
| `getSignalLevel(response)` | **bool** | Retrieves the signal level of each player (0-255), filling the `response` struct.
For hosts, the array will contain the signal level of each client in indexes 1-4. For clients, it will only include the index corresponding to the `currentPlayerId()`.
For clients, this action can fail if the adapter is busy. In that case, this will return `false` and `getLastError()` will be `BUSY_TRY_AGAIN`. For hosts, you already have this data, so it's free! |
| `getServers(servers, serverCount, [onWait])` | **bool** | Fills the `servers` array with all the currently broadcasting servers. This action takes 1 second to complete, but you can optionally provide an `onWait()` function which will be invoked each time VBlank starts. |
| `getServersAsyncStart()` | **bool** | Starts looking for broadcasting servers and changes the state to `SEARCHING`. After this, call `getServersAsyncEnd(...)` 1 second later. |
| `getServersAsyncEnd(servers, serverCount)` | **bool** | Fills the `servers` array with all the currently broadcasting servers. Changes the state to `AUTHENTICATED` again. |
| `connect(serverId)` | **bool** | Starts a connection with `serverId` and changes the state to `CONNECTING`. |
| `keepConnecting()` | **bool** | When connecting, this needs to be called until the state is `CONNECTED`. It assigns a player ID.
Keep in mind that `isConnected()` and `playerCount()` won't be updated until the first message from the server arrives. |
| `canSend()` | **bool** | Returns whether a `send(...)` call would fail due to the queue being full or not. |
| `send(data)` | **bool** | Enqueues `data` to be sent to other nodes. |
| `receive(messages, receivedCount)` | **bool** | Fills the `messages` array with incoming messages. |
| `getState()` | **State** | Returns the current state (one of `LinkWireless::State::NEEDS_RESET`, `LinkWireless::State::AUTHENTICATED`, `LinkWireless::State::SEARCHING`, `LinkWireless::State::SERVING`, `LinkWireless::State::CONNECTING`, or `LinkWireless::State::CONNECTED`). |
| `isConnected()` | **bool** | Returns `true` if the player count is higher than `1`. |
| `isSessionActive()` | **bool** | Returns `true` if the state is `SERVING` or `CONNECTED`. |
| `isServerClosed()` | **bool** | Returns `true` if the server was closed with `closeServer()`. |
| `playerCount()` | **u8** _(1~5)_ | Returns the number of connected players. |
| `currentPlayerId()` | **u8** _(0~4)_ | Returns the current player ID. |
| `didQueueOverflow([clear])` | **bool** | Returns whether the internal queue lost messages at some point due to being full. This can happen if your queue size is too low, if you receive too much data without calling `receive(...)` enough times, or if excessive `receive(...)` calls prevent the ISR from copying data.
After this call, the overflow flag is cleared if `clear` is `true` (default behavior). |
| `resetTimeout()` | - | Resets other players' timeout count to `0`. Call this before reducing `config.timeout`. |
| `resetTimer()` | - | Restarts the send timer without disconnecting. Call this if you changed `config.interval`. |
| `getLastError([clear])` | **Error** | If one of the other methods returns `false`, you can inspect this to know the cause.
After this call, the last error is cleared if `clear` is `true` (default behavior). |
## Compile-time constants
- `LINK_WIRELESS_QUEUE_SIZE`: to set a custom buffer size (how many incoming and outgoing messages the queues can store at max). The default value is `30`, which seems fine for most games.
- This affects how much memory is allocated. With the default value, it's around `480` bytes. There's a double-buffered incoming queue and a double-buffered outgoing queue (to avoid data races).
- You can approximate the memory usage with:
- `LINK_WIRELESS_QUEUE_SIZE * sizeof(Message) * 4` <=> `LINK_WIRELESS_QUEUE_SIZE * 16`
- `LINK_WIRELESS_MAX_SERVER_TRANSFER_LENGTH` and `LINK_WIRELESS_MAX_CLIENT_TRANSFER_LENGTH`: to set the biggest allowed transfer per timer tick. Higher values will use the bandwidth more efficiently but also consume more CPU! These values must be in the range `[6;21]` for servers and `[2;4]` for clients. The default values are `11` and `4`, but you might want to set them a bit lower to reduce CPU usage.
- This is measured in words (1 message = 1 halfword). One word is used as a header, so a max transfer length of 11 could transfer up to 20 messages.
- `LINK_WIRELESS_PUT_ISR_IN_IWRAM`: to put critical functions in IWRAM, which can significantly improve performance due to its faster access. This is disabled by default to conserve IWRAM space, which is limited, but it's enabled in demos to showcase its performance benefits.
- If you enable this, make sure that `lib/iwram_code/LinkWireless.cpp` gets compiled! For example, in a Makefile-based project, verify that the directory is in your `SRCDIRS` list.
- Depending on how much IWRAM you have available, you might want to tweak these knobs:
- `LINK_WIRELESS_PUT_ISR_IN_IWRAM_SERIAL`: (default: `1`) Put the SERIAL ISR in IWRAM (recommended, since this handler runs ~20 times per frame)
- `LINK_WIRELESS_PUT_ISR_IN_IWRAM_TIMER`: (default: `1`) Put the TIMER ISR in IWRAM (not that necessary)
- `LINK_WIRELESS_PUT_ISR_IN_IWRAM_SERIAL_LEVEL`: (default: `"-Ofast"`) Optimization level for the SERIAL ISR
- `LINK_WIRELESS_PUT_ISR_IN_IWRAM_TIMER_LEVEL`: (default: `"-Ofast"`) Optimization level for the TIMER ISR
- `LINK_WIRELESS_ENABLE_NESTED_IRQ`: to allow `LINK_WIRELESS_ISR_*` functions to be interrupted. This can be useful, for example, if your audio engine requires calling a VBlank handler with precise timing.
# 💻 LinkWirelessMultiboot
_(aka Multiboot through Wireless Adapter)_
[⬆️](#gba-link-connection) This tool allows sending Multiboot ROMs (small 256KiB programs that fit in EWRAM) from one GBA to up to 4 slaves, wirelessly, using a single cartridge.
Its demo (`LinkWirelessMultiboot_demo`) has all the other gba-link-connection ROMs bundled with it, so it can be used to quickly test the library.
https://github.com/afska/gba-link-connection/assets/1631752/9a648bff-b14f-4a85-92d4-ccf366adce2d
## Sync version
This version is simpler and blocks the system thread until completion. It doesn't require interrupt service routines.
### Methods
| Name | Return type | Description |
| --------------------------------------------------------------------------------------------- | ----------- | --------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- |
| `sendRom(rom, romSize, gameName, userName, gameId, players, listener, [keepConnectionAlive])` | **Result** | Sends the `rom`.
The `players` must be the number of consoles that will download the ROM. Once this number of players is reached, the code will start transmitting the ROM bytes.
During the process, the library will continuously invoke `listener` (passing a `LinkWirelessMultiboot::MultibootProgress` object as argument), and abort the transfer if it returns `true`.
The `romSize` must be a number between `448` and `262144`. It's recommended to use a ROM size that is a multiple of `16`, since this also ensures compatibility with Multiboot via Link Cable.
Once completed, the return value should be `LinkWirelessMultiboot::Result::SUCCESS`.
You can start the transfer before the player count is reached by running `*progress.ready = true;` in the `listener` callback.
If `keepConnectionAlive` is `true`, the adapter won't be reset after a successful transfer, so users can continue the session using `LinkWireless::restoreExistingConnection()`. |
| `reset()` | **bool** | Turns off the adapter and deactivates the library. It returns a boolean indicating whether the transition to low consumption mode was successful. |
### Compile-time constants
- `LINK_WIRELESS_MULTIBOOT_ENABLE_LOGGING`: to enable logging. Set `linkWirelessMultiboot->logger` and it will be called to report the detailed state of the library. Note that this option `#include`s `std::string`!
## Async version
This version (`LinkWirelessMultiboot::Async`) allows more advanced use cases like playing animations and/or audio during the transfers, displaying the number of connected players and send percentage, and marking the transfer as 'ready' to start. It requires adding the provided interrupt service routines. The class is polymorphic with `LinkCableMultiboot::Async`.
### Constructor
`new LinkWirelessMultiboot::Async(...)` accepts these **optional** parameters:
| Name | Type | Default | Description |
| --------------------- | ---------------------- | -------- | ----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- |
| `gameName` | **const char\*** | `""` | Game name. Maximum `14` characters + null terminator. |
| `userName` | **const char\*** | `""` | User name. Maximum `8` characters + null terminator. |
| `gameId` | **u16** _(0 ~ 0x7FFF)_ | `0x7FFF` | The Game ID to be broadcasted. |
| `players` | **u32** _(2~5)_ | `5` | The number of consoles that will download the ROM. Once this number of players is reached, the code will start transmitting the ROM bytes, unless `waitForReadySignal` is `true`. |
| `waitForReadySignal` | **bool** | `false` | Whether the code should wait for a `markReady()` call to start the actual transfer. |
| `keepConnectionAlive` | **bool** | `false` | If `true`, the adapter won't be reset after a successful transfer, so users can continue the session using `LinkWireless::restoreExistingConnection()`. |
| `interval` | **u16** | `50` | Number of _1024-cycle ticks_ (61.04μs) between transfers _(50 = 3.052ms)_. It's the interval of Timer #`timerId`.
Lower values will transfer faster but also consume more CPU. Some audio players require precise interrupt timing to avoid crashes! Use a minimum of 30. |
| `timerId` | **u8** _(0~3)_ | `3` | GBA Timer to use for sending. |
You can update these values at any time without creating a new instance by mutating the `config` property. Keep in mind that the changes won't be applied after the next `sendRom(...)` call.
### Methods
| Name | Return type | Description |
| ---------------------------- | ----------------- | --------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- |
| `sendRom(rom, romSize)` | **bool** | Sends the `rom`.
The `romSize` must be a number between `448` and `262144`. It's recommended to use a ROM size that is a multiple of `16`, since this also ensures compatibility with Multiboot via Link Cable.
Once completed, `isSending()` should return `false` and `getResult()` should return `LinkWirelessMultiboot::Async::GeneralResult::SUCCESS`.
Returns `false` if there's a pending transfer or the data is invalid. |
| `reset()` | **bool** | Turns off the adapter and deactivates the library, canceling the in-progress transfer, if any. It returns a boolean indicating whether the transition to low consumption mode was successful. |
| `isSending()` | **bool** | Returns whether there's an active transfer or not. |
| `getState()` | **State** | Returns the current state. |
| `getResult([clear])` | **GeneralResult** | Returns the result of the last operation.
After this call, the result is cleared if `clear` is `true` (default behavior). |
| `getDetailedResult([clear])` | **Result** | Returns the detailed result of the last operation.
After this call, the result is cleared if `clear` is `true` (default behavior). |
| `playerCount()` | **u8** _(1~5)_ | Returns the number of connected players. |
| `getPercentage()` | **u32** _(0~100)_ | Returns the completion percentage. |
| `isReady()` | **bool** | Returns whether the ready mark is active or not. |
| `markReady()` | **bool** | Marks the transfer as ready. |
⚠️ never call `reset()` inside an interrupt handler!
### Compile-time constants
- `LINK_WIRELESS_MULTIBOOT_ENABLE_LOGGING`: to enable logging. Set `linkWirelessMultibootAsync->logger` and it will be called to report the detailed state of the library. Note that this option `#include`s `std::string`!
- `LINK_WIRELESS_MULTIBOOT_ASYNC_DISABLE_NESTED_IRQ`: to disable nested IRQs. In the async version, SERIAL IRQs can be interrupted (once they clear their time-critical needs) by default, which helps prevent issues with audio engines. However, if something goes wrong, you can disable this behavior.
# 🔧📻 LinkRawWireless
[⬆️](#gba-link-connection)
- This is a minimal hardware wrapper designed for the _Wireless Adapter_.
- It doesn't include any of the features of [📻 LinkWireless](#-LinkWireless), so it's not well suited for games.
- Its demo (`LinkRawWireless_demo`) can help emulator developers in enhancing accuracy.
## Methods
- There's one method for every supported Wireless Adapter command:
- `setup` = `0x17`
- `getSystemStatus` = `0x13`
- `broadcast` = `0x16`
- `startHost` = `0x19`
- `getSignalLevel` = `0x11`
- `getSlotStatus` = `0x14`
- `pollConnections` = `0x1A`
- `endHost` = `0x1B`
- `broadcastReadStart` = `0x1C`
- `broadcastReadPoll` = `0x1D`
- `broadcastReadEnd` = `0x1E`
- `connect` = `0x1F`
- `keepConnecting` = `0x20`
- `finishConnection` = `0x21`
- `sendData` = `0x24`
- `sendDataAndWait` = `0x25`
- `receiveData` = `0x26`
- `wait` = `0x27`
- `disconnectClient` = `0x30`
- `bye` = `0x3D`
- Use `sendCommand(...)` to send arbitrary commands.
- Use `sendCommandAsync(...)` to send arbitrary commands asynchronously.
- This requires setting `LINK_RAW_WIRELESS_ISR_SERIAL` as the `SERIAL` interrupt handler.
- After calling this method, call `getAsyncState()` and `getAsyncCommandResult()`.
- Do not call any other methods until the async state is `IDLE` again, or the adapter will desync!
- When sending arbitrary commands, the responses are not parsed. The exceptions are `SendData` and `ReceiveData`, which have these helpers:
- `getSendDataHeaderFor(...)`
- `getReceiveDataResponse(...)`
⚠️ advanced usage only; if you're building a game, use `LinkWireless`!
### Compile-time constants
- `LINK_RAW_WIRELESS_ENABLE_LOGGING`: to enable logging. Set `linkRawWireless->logger` and it will be called to report the detailed state of the library. Note that this option `#include`s `std::string`!
# 🔧🏛 LinkWirelessOpenSDK
[⬆️](#gba-link-connection) All first-party games, including the Multiboot 'bootloader' sent by the adapter, use an official software-level protocol. This class provides methods for creating and reading packets that adhere to this protocol. It's supposed to be used in conjunction with [🔧📻 LinkRawWireless](#-LinkRawWireless).
Additionally, there's a `LinkWirelessOpenSDK::MultiTransfer` class for file transfers, used by multiboot.
## Methods
| Name | Return type | Description |
| ------------------------------------------------------------------------------------- | ------------------------------- | -------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- |
| `getChildrenData(response)` | **ChildrenData** | Parses the `response` and returns a struct containing all the received packets from the connected clients. |
| `getParentData(response)` | **ParentData** | Parses the `response` and returns a struct containing all the received packets from the host. |
| `createServerBuffer(fullPayload, fullPayloadSize, sequence, [targetSlots], [offset])` | **SendBuffer** | Creates a buffer for the host to send a `fullPayload` with a valid header.
If `fullPayloadSize` is higher than `84` (the maximum payload size), the buffer will only contain the **first** `84` bytes (unless an `offset` > 0 is used).
A `sequence` number must be created by using `LinkWirelessOpenSDK::SequenceNumber::fromPacketId(...)`.
Optionally, a `targetSlots` bit array can be used to exclude some clients from the transmissions (the default is `0b1111`). |
| `createServerACKBuffer(clientHeader, clientNumber)` | **SendBuffer** | Creates a buffer for the host to acknowledge a header received from a certain `clientNumber`. |
| `createClientBuffer(fullPayload, fullPayloadSize, sequence, [offset])` | **SendBuffer** | Creates a buffer for the client to send a `fullPayload` with a valid header.
If `fullPayloadSize` is higher than `14` (the maximum payload size), the buffer will only contain the **first** `14` bytes (unless an `offset` > 0 is used).
A `sequence` number must be created by using `LinkWirelessOpenSDK::SequenceNumber::fromPacketId(...)`. |
| `createClientACKBuffer(serverHeader)` | **SendBuffer** | Creates a buffer for the client to acknowledge a header received from the host. |
⚠️ advanced usage only; you only need this if you want to interact with N software!
# 🌎 LinkUniversal
[⬆️](#gba-link-connection) A multiuse library that doesn't care whether you plug a Link Cable or a Wireless Adapter. It continuously switches between both and tries to connect to other peers, supporting the hot swapping of cables and adapters and all the features from [👾 LinkCable](#-LinkCable) and [📻 LinkWireless](#-LinkWireless).
https://github.com/afska/gba-link-connection/assets/1631752/d1f49a48-6b17-4954-99d6-d0b7586f5730
## Constructor
`new LinkUniversal(...)` accepts these **optional** parameters:
| Name | Type | Default | Description |
| ----------------- | ------------------- | ---------------------- | ------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- |
| `protocol` | **Protocol** | `AUTODETECT` | Specifies what protocol should be used (one of `LinkUniversal::Protocol::AUTODETECT`, `LinkUniversal::Protocol::CABLE`, `LinkUniversal::Protocol::WIRELESS_AUTO`, `LinkUniversal::Protocol::WIRELESS_SERVER`, `LinkUniversal::Protocol::WIRELESS_CLIENT`, or `LinkUniversal::Protocol::WIRELESS_RESTORE_EXISTING`). |
| `gameName` | **const char\*** | `""` | The game name that will be broadcasted in wireless sessions (max `14` characters). The string must be a null-terminated character array. The library uses this to only connect to servers from the same game. |
| `cableOptions` | **CableOptions** | _same as LinkCable_ | All the [👾 LinkCable](#-LinkCable) constructor parameters in one _struct_. |
| `wirelessOptions` | **WirelessOptions** | _same as LinkWireless_ | All the [📻 LinkWireless](#-LinkWireless) constructor parameters in one _struct_. |
## Methods
The interface is the same as [👾 LinkCable](#-LinkCable). Additionally, it supports these methods:
| Name | Return type | Description |
| ----------------------- | ----------------------- | -------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- |
| `getState()` | **State** | Returns the current state (one of `LinkUniversal::State::INITIALIZING`, `LinkUniversal::State::WAITING`, or `LinkUniversal::State::CONNECTED`). |
| `getMode()` | **Mode** | Returns the active mode (one of `LinkUniversal::Mode::LINK_CABLE`, or `LinkUniversal::Mode::LINK_WIRELESS`). |
| `getProtocol()` | **Protocol** | Returns the active protocol (one of `LinkUniversal::Protocol::AUTODETECT`, `LinkUniversal::Protocol::CABLE`, `LinkUniversal::Protocol::WIRELESS_AUTO`, `LinkUniversal::Protocol::WIRELESS_SERVER`, `LinkUniversal::Protocol::WIRELESS_CLIENT`, or `LinkUniversal::Protocol::WIRELESS_RESTORE_EXISTING`). |
| `setProtocol(protocol)` | - | Sets the active `protocol`. |
| `getWirelessState()` | **LinkWireless::State** | Returns the wireless state (same as [📻 LinkWireless](#-LinkWireless)'s `getState()`). |
| `isConnectedNow()` | **bool** | Like `isConnected()`, but returns whether there's an active connection right now, meaning that it can change between `sync()` calls. |
| `getLinkCable()` | **LinkCable\*** | Returns the internal `LinkCable` instance (for advanced usage). |
| `getLinkWireless()` | **LinkWireless\*** | Returns the internal `LinkWireless` instance (for advanced usage). |
## Compile-time constants
- `LINK_UNIVERSAL_MAX_PLAYERS`: to set a maximum number of players. The default value is `5`, but since LinkCable's limit is `4`, you might want to decrease it.
- `LINK_UNIVERSAL_GAME_ID_FILTER`: to restrict wireless connections to rooms with a specific game ID (`0x0000` ~ `0x7FFF`). The default value (`0`) connects to any game ID and uses `0x7FFF` when serving.
# 🔌 LinkGPIO
_(aka General Purpose Mode)_
[⬆️](#gba-link-connection) This is the default Link Port mode, and it allows users to manipulate pins `SI`, `SO`, `SD` and `SC` directly.

## Methods
| Name | Return type | Description |
| ---------------------------- | ------------- | --------------------------------------------------------------------------------------------------------------- |
| `reset()` | - | Resets communication mode to General Purpose (same as `Link::reset()`). **Required to initialize the library!** |
| `setMode(pin, direction)` | - | Configures a `pin` to use a `direction` (input or output). |
| `getMode(pin)` | **Direction** | Returns the direction set at `pin`. |
| `readPin(pin)` | **bool** | Returns whether a `pin` is _HIGH_ or not (when set as an input). |
| `writePin(pin, isHigh)` | - | Sets a `pin` to be high or not (when set as an output). |
| `setSIInterrupts(isEnabled)` | - | If it `isEnabled`, an IRQ will be generated when `SI` changes from _HIGH_ to _LOW_. |
| `getSIInterrupts()` | **bool** | Returns whether SI-falling interrupts are enabled or not. |
⚠️ always set the `SI` terminal to an input!
⚠️ call `reset()` when you finish doing GPIO stuff! (for compatibility with the other libraries)
# 🔗 LinkSPI
_(aka Normal Mode)_
[⬆️](#gba-link-connection) This is the GBA's implementation of SPI. You can use this to interact with other GBAs or computers that know SPI.

## Methods
| Name | Return type | Description |
| ------------------------------- | -------------- | ------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------ |
| `isActive()` | **bool** | Returns whether the library is active or not. |
| `activate(mode, [dataSize])` | - | Activates the library in a specific `mode` (one of `LinkSPI::Mode::SLAVE`, `LinkSPI::Mode::MASTER_256KBPS`, or `LinkSPI::Mode::MASTER_2MBPS`). By default, the `dataSize` is 32-bit, but can be changed to `LinkSPI::DataSize::SIZE_8BIT`. |
| `deactivate()` | - | Deactivates the library. |
| `transfer(data)` | **u32** | Exchanges `data` with the other end. Returns the received data. |
| `transfer(data, cancel)` | **u32** | Like `transfer(data)`, but accepts a `cancel()` function. The library will continuously invoke it, and abort the transfer if it returns `true`. |
| `transferAsync(data, [cancel])` | - | Schedules a `data` transfer and returns. After this, call `getAsyncState()` and `getAsyncData()`.
Note that until you retrieve the async data, normal `transfer(...)`s won't do anything! |
| `getAsyncState()` | **AsyncState** | Returns the state of the last async transfer (one of `LinkSPI::AsyncState::IDLE`, `LinkSPI::AsyncState::WAITING`, or `LinkSPI::AsyncState::READY`). |
| `getAsyncData()` | **u32** | If the async state is `READY`, returns the remote data and switches the state back to `IDLE`. If not, returns an empty response. |
| `getMode()` | **Mode** | Returns the current `mode`. |
| `getDataSize()` | **DataSize** | Returns the current `dataSize`. |
| `setWaitModeActive(isActive)` | - | Enables or disables `waitMode` (\*). |
| `isWaitModeActive()` | **bool** | Returns whether `waitMode` (\*) is active or not. |
> (\*) `waitMode`: The GBA adds an extra feature over SPI. When working as master, it can check whether the other terminal is ready to receive (ready: `MISO=LOW`), and wait if it's not (not ready: `MISO=HIGH`). That makes the connection more reliable, but it's not always supported on other hardware units (e.g. the Wireless Adapter), so it must be disabled in those cases.
>
> `waitMode` is disabled by default.
>
> `MISO` means `SO` on the slave side and `SI` on the master side.
⚠️ when using Normal Mode between two GBAs, use a GBC Link Cable!
⚠️ only use the 2Mbps mode with custom hardware (very short wires)!
⚠️ returns `0xFFFFFFFF` (or `0xFF`) on misuse or cancelled transfers!
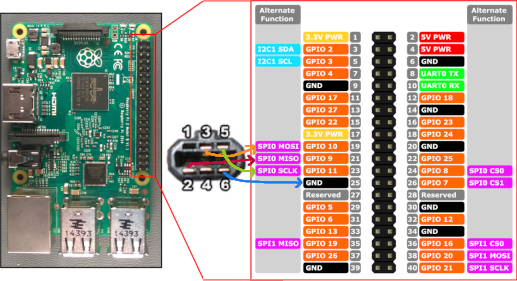
## SPI Configuration
The GBA operates using **SPI mode 3** (`CPOL=1, CPHA=1`). Here's a connection diagram that illustrates how to connect a Link Cable to a Raspberry Pi 3's SPI pins:
# ⏱️ LinkUART
_(aka UART Mode)_
[⬆️](#gba-link-connection) This is the GBA's implementation of UART. You can use this to interact with a PC using a _USB to UART cable_.

## Methods
| Name | Return type | Description |
| ---------------------------------------------- | ----------- | -------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- |
| `isActive()` | **bool** | Returns whether the library is active or not. |
| `activate(baudRate, dataSize, parity, useCTS)` | - | Activates the library using a specific UART mode. _Defaults: 9600bps, 8-bit data, no parity bit, no CTS_. |
| `deactivate()` | - | Deactivates the library. |
| `sendLine(string)` | - | Takes a null-terminated `string`, and sends it followed by a `'\n'` character. The null character is not sent. |
| `sendLine(data, cancel)` | - | Like `sendLine(string)`, but accepts a `cancel()` function. The library will continuously invoke it, and abort the transfer if it returns `true`. |
| `readLine(string, [limit])` | **bool** | Reads characters into `string` until finding a `'\n'` character or a character `limit` is reached. A null terminator is added at the end.
Returns `false` if the limit has been reached without finding a newline character. |
| `readLine(string, cancel, [limit])` | **bool** | Like `readLine(string, [limit])`, but accepts a `cancel()` function. The library will continuously invoke it, and abort the transfer if it returns `true`. |
| `send(buffer, size, offset)` | - | Sends `size` bytes from `buffer`, starting at byte `offset`. |
| `read(buffer, size, offset)` | **u32** | Tries to read `size` bytes into `(u8*)(buffer + offset)`. Returns the number of read bytes. |
| `canRead()` | **bool** | Returns whether there are bytes to read or not. |
| `canSend()` | **bool** | Returns whether there is room to send new messages or not. |
| `availableForRead()` | **u32** | Returns the number of bytes available for read. |
| `availableForSend()` | **u32** | Returns the number of bytes available for send (buffer size - queued bytes). |
| `read()` | **u8** | Reads a byte. Returns 0 if nothing is found. |
| `send(data)` | - | Sends a `data` byte. |
## Compile-time constants
- `LINK_UART_QUEUE_SIZE`: to set the buffer size.
## UART Configuration
The GBA operates using `1` stop bit, but everything else can be configured. By default, the library uses `8N1`, which means 8-bit data and no parity bit. RTS/CTS is disabled by default.

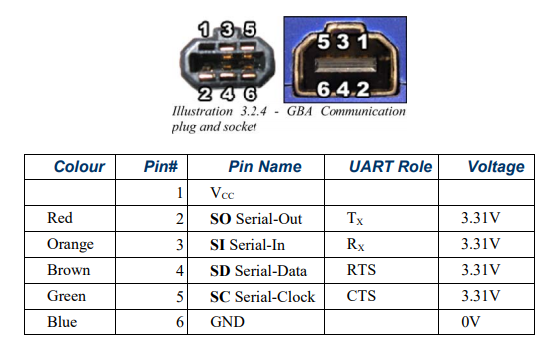
- Black wire (`GND`) -> GBA `GND`.
- Green wire (`TX`) -> GBA `SI`.
- White wire (`RX`) -> GBA `SO`.
# 🟪 LinkCube
_(aka JOYBUS Mode)_
[⬆️](#gba-link-connection) This is the GBA's implementation of JOYBUS, in which users connect the console to a _GameCube_ (or _Wii_ with GC ports) using an official adapter. The library can be tested using _Dolphin/mGBA_ and [gba-joybus-tester](https://github.com/afska/gba-joybus-tester).

## Methods
| Name | Return type | Description |
| --------------------------- | ----------- | ------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------