https://github.com/ai4ce/V2X-Sim
[RA-L2022] V2X-Sim Dataset and Benchmark
https://github.com/ai4ce/V2X-Sim
benchmark collaborative-perception computer-vision dataset deep-learning machine-learning multi-robot-systems pytorch simulation v2x vehicle-to-everything
Last synced: over 1 year ago
JSON representation
[RA-L2022] V2X-Sim Dataset and Benchmark
- Host: GitHub
- URL: https://github.com/ai4ce/V2X-Sim
- Owner: ai4ce
- License: apache-2.0
- Created: 2021-08-26T16:45:29.000Z (almost 5 years ago)
- Default Branch: main
- Last Pushed: 2023-09-15T20:27:23.000Z (almost 3 years ago)
- Last Synced: 2024-07-12T11:11:24.520Z (about 2 years ago)
- Topics: benchmark, collaborative-perception, computer-vision, dataset, deep-learning, machine-learning, multi-robot-systems, pytorch, simulation, v2x, vehicle-to-everything
- Homepage: https://ai4ce.github.io/V2X-Sim
- Size: 375 MB
- Stars: 108
- Watchers: 5
- Forks: 15
- Open Issues: 5
-
Metadata Files:
- Readme: README.md
Awesome Lists containing this project
- awesome-datasets-hub - **V2X-Sim Bench** - 4f46e5?style=flat-square) | V2X |  | NYU | (⚡ VLSI (Very Large-Scale Integration) Datasets)
README
# V2X-Sim: Multi-Agent Collaborative Perception Dataset and Benchmark for Autonomous Driving [RA-L 2022]
[Yiming Li](https://scholar.google.com/citations?user=i_aajNoAAAAJ), [Dekun Ma](https://dekun.me), [Ziyan An](https://ziyanan.github.io/), [Zixun Wang](), [Yiqi Zhong](https://www.linkedin.com/in/yiqi-zhong-078548129), [Siheng Chen](https://scholar.google.com/citations?user=W_Q33RMAAAAJ&hl=en), [Chen Feng](https://scholar.google.com/citations?user=YeG8ZM0AAAAJ)
**"A comprehensive multi-agent multi-modal multi-task 3D perception dataset for autonomous driving."**
[](https://ai4ce.github.io/V2X-Sim/)

[](https://gitlab.com/ai4ce/V2X-Sim/issues)
[](https://GitHub.com/ai4ce/V2X-Sim/stargazers/)
## News
**[2022-07]** Our paper is available at [arxiv](https://arxiv.org/pdf/2202.08449.pdf).
**[2022-06]** 🔥 V2X-Sim is accepted at **IEEE Robotics and Automation Letters (RA-L)**.
## Abstract
Vehicle-to-everything (V2X) communication techniques enable the collaboration between a vehicle and any other
entity in its surrounding, which could fundamentally improve
the perception system for autonomous driving. However, the
lack of a public dataset significantly restricts the research
progress of collaborative perception. To fill this gap, we present
V2X-Sim, a comprehensive simulated multi-agent perception
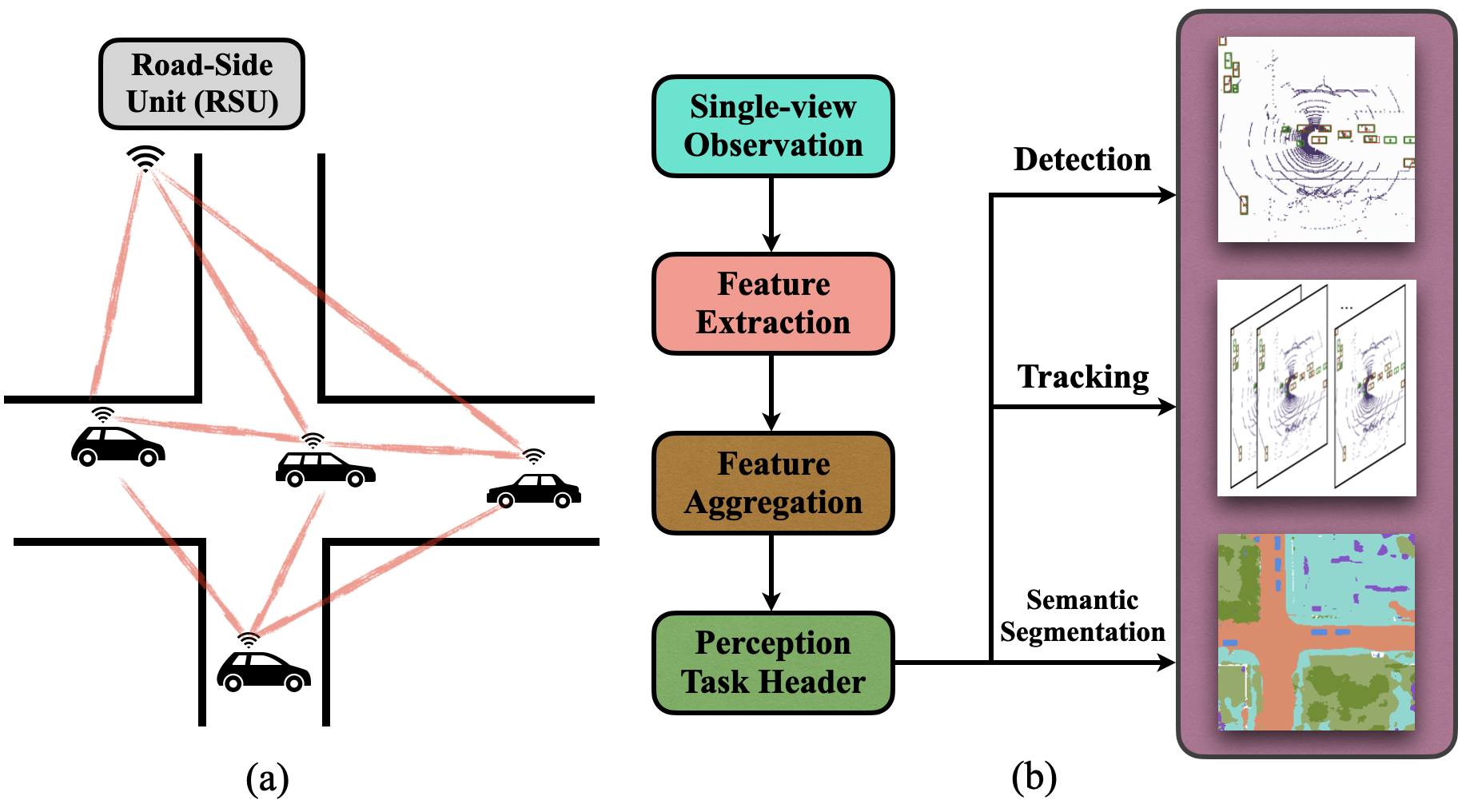
dataset for V2X-aided autonomous driving. V2X-Sim provides:
(1) multi-agent sensor recordings from the road-side unit (RSU)
and multiple vehicles that enable collaborative perception, (2)
multi-modality sensor streams that facilitate multi-modality
perception, and (3) diverse ground truths that support various
perception tasks. Meanwhile, we build an open-source testbed
and provide a benchmark for the state-of-the-art collaborative
perception algorithms on three tasks, including detection, tracking and segmentation. V2X-Sim seeks to stimulate collaborative
perception research for autonomous driving before realistic
datasets become widely available.
## Dataset
Download links:
- Original dataset (you are going to parse this dataset yourself with `create_data.py` scripts for specific tasks): [Google Drive (US)](https://huggingface.co/datasets/ai4ce/V2X-Sim-2.0)
- preprocessed datasets for detection and segmentation tasks and model checkpoints: [Google Drive (US)](https://drive.google.com/drive/folders/1NMag-yZSflhNw4y22i8CHTX5l8KDXnNd?usp=sharing)
You could find more detailed documents on our [website](https://ai4ce.github.io/V2X-Sim/index.html)!
V2X-Sim follows the same file structure as the [Nuscenes dataset](https://www.nuscenes.org/):
```
V2X-Sim
├── maps # images for the map of one of the towns
├── sweeps # sensor data
| ├── LIDAR_TOP_id_0 # top lidar data for the top camera, agent 0 (RSU)
| ├── LIDAR_TOP_id_1 # top lidar data for the top camera, agent 1
| ├── LIDAR_TOP_id_2 # top lidar data for the top camera, agent 2
| ...
├── v1.0-mini # metadata
| ├── scene.json # metadata for all the scenes
| ├── sample.json # metadata for each sample, organized like linked-list
| ├── sample_annotation.json # sample annotation metadata for each scene
| ...
```
For parsed detection and segmentation dataset, the file structure will be:
```
V2X-Sim-det / V2X-Sim-seg
├── train # training data
| ├── agent0 # data for RSU
| | ├── 0_0 # scene 0, frame 0
| | ├── 0_1 # scene 0, frame 1
| | | ...
| ├── agent1 # data for agent 1
| ...
| ├── agent5 # data for agent 5
├── val # validation data
├── test # test data
```
https://user-images.githubusercontent.com/53892579/180342204-1697f102-5f69-45d1-a62e-9460f4628fb8.mp4
https://user-images.githubusercontent.com/53892579/180342351-ef58e302-9bcb-47fa-a80f-1fe49ee80152.mp4
https://user-images.githubusercontent.com/53892579/180341986-1389ba9a-2bab-427f-8873-7cd7cba38fbe.mp4
## Requirements
Tested with:
- Python 3.7
- PyTorch 1.8.0
- Torchvision 0.9.0
- CUDA 11.2
## Benchmark
We implement when2com, who2com, V2VNet, lowerbound and upperbound benchmark experiments on our datasets. You are welcome to go to `README` files in [detection](https://github.com/coperception/coperception/tree/master/tools/det), [segmentation](https://github.com/coperception/coperception/tree/master/tools/seg) and [tracking](https://github.com/coperception/coperception/tree/master/tools/track) to find them.
## Acknowledgement
We are very grateful to multiple great opensourced codebases, without which this project would not have been possible:
- [NuSenes-devkit](https://github.com/nutonomy/nuscenes-devkit)
- [sort](https://github.com/abewley/sort)
- [TrackEval](https://github.com/JonathonLuiten/TrackEval)
- [coperception](https://github.com/coperception/coperception)
## Citation
If you find V2XSIM useful in your research, please cite:
```bibtex
@article{li2022v2x,
title={V2X-Sim: Multi-Agent Collaborative Perception Dataset and Benchmark for Autonomous Driving},
author={Li, Yiming and Ma, Dekun and An, Ziyan and Wang, Zixun and Zhong, Yiqi and Chen, Siheng and Feng, Chen},
journal={IEEE Robotics and Automation Letters},
volume={7},
number={4},
pages={10914--10921},
year={2022},
publisher={IEEE}
}
```