https://github.com/aitikgupta/e-rotanet
Let the model rotate images according to human-perception, a CV pipeline.
https://github.com/aitikgupta/e-rotanet
computer-vision hacktoberfest human-perception machine-learning rotation
Last synced: 11 months ago
JSON representation
Let the model rotate images according to human-perception, a CV pipeline.
- Host: GitHub
- URL: https://github.com/aitikgupta/e-rotanet
- Owner: aitikgupta
- License: mit
- Created: 2020-06-30T03:56:42.000Z (about 6 years ago)
- Default Branch: master
- Last Pushed: 2021-05-25T03:47:09.000Z (about 5 years ago)
- Last Synced: 2023-05-01T02:50:26.895Z (about 3 years ago)
- Topics: computer-vision, hacktoberfest, human-perception, machine-learning, rotation
- Language: Python
- Homepage: https://aitikgupta.github.io/e-rotanet/
- Size: 51.3 MB
- Stars: 14
- Watchers: 2
- Forks: 2
- Open Issues: 1
-
Metadata Files:
- Readme: README.md
- License: LICENSE
Awesome Lists containing this project
README
# E-RotaNet
### Learning the context of images, and rotating them according to human-perception.
## Demo
### Note: Screenshots at the bottom
#### What is 'E' in E-Rotanet?
'E' stands for the Efficientnet backbone used in the model, to learn the features and the context of the images.
*EfficientNets are a family of image classification models, which achieve state-of-the-art accuracy, yet being an order-of-magnitude smaller and faster than previous models.*
#### About the dataset
The released models are trained on [Google Street View](https://www.crcv.ucf.edu/data/GMCP_Geolocalization/) dataset, which contains ~62k images which contain mostly human-perception viewing angles of streets and buildings.
#### Reproducing Results
Note: I highly recommend using [Anaconda](https://anaconda.org/) to maintain the environments.
```
git clone https://github.com/aitikgupta/E-RotaNet.git
cd E-RotaNet
conda env create -f environment.yml
conda activate e-rotanet
```
* #### Using the flask application to test the model
```
python E-RotaNet.py
```
The flask application will run on http://127.0.0.1:5000/
* #### Training the model from scratch
Note: Training the model will consume around 1-1.5 hours of GPU
```
python src/train.py --help
>>usage: train.py
[-h] [--image_dir IMAGE_DIR] [--model_save MODEL_SAVE]
[--resume_training RESUME_TRAINING] [--tb_dir TB_DIR]
[--batch_size BATCH_SIZE] [--n_epochs N_EPOCHS]
[--val_split VAL_SPLIT] [--img_size IMG_SIZE] [--regress]
[--device DEVICE]
optional arguments:
-h, --help show this help message and exit
--image_dir IMAGE_DIR
Path to images directory
--model_save MODEL_SAVE
Model output directory
--resume_training RESUME_TRAINING
Path to model checkpoint to resume training
--tb_dir TB_DIR Tensorboard logs directory
--batch_size BATCH_SIZE
Batch size
--n_epochs N_EPOCHS Number of epochs
--val_split VAL_SPLIT
Validation split for images, eg. (0.2)
--img_size IMG_SIZE Input size of image to the model, eg. (224,224)
--regress Use regression instead of classification
--device DEVICE Use device for inference (gpu/cpu)
```
* #### Evaluating a trained model
Note: 2-ways to proceed:
1. Evaluate an image directory (Images will be randomly rotated)
2. Evaluate a single image (Image will be rotated from 0->360 degrees and mean error will be printed)
```
python src/evaluate.py --help
>>usage: evaluate.py [-h] [--model_dir MODEL_DIR] [--eval_dir EVAL_DIR]
[--eval_single EVAL_SINGLE] [--batch_size BATCH_SIZE]
[--img_size IMG_SIZE] [--regress] [--device DEVICE]
optional arguments:
-h, --help show this help message and exit
--model_dir MODEL_DIR
Path to model
--eval_dir EVAL_DIR Path to images directory (Images will be randomly
rotated)
--eval_single EVAL_SINGLE
Path to the image (Image will be rotated from 0 to 360
degrees)
--batch_size BATCH_SIZE
Batch size
--img_size IMG_SIZE Input size of image to the model
--regress Use regression instead of classification
--device DEVICE Use device for inference (gpu/cpu)
```
#### Individual files can be run to view intermediate steps in the whole pipeline. Example:
* To look at how the loss function works:
```
python src/loss.py
>>Total Error: 0.7847222089767456
Absolute differences between angles:
Truth: 60.0, Pred: 355.0 ; Diff: 65.0
Truth: 90.0, Pred: 360.0 ; Diff: 90.0
```
*
```
python src/preprocess.py
>>[, (1024, 1280, 3)]
```
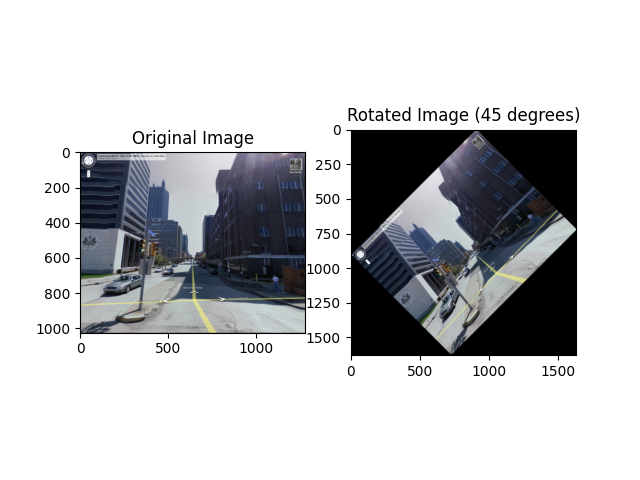
Note: The black corners are just for demonstration purpose, they're cropped in the actual pipeline
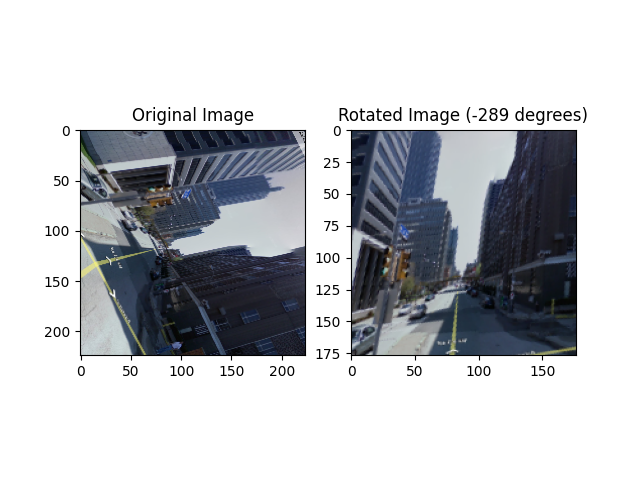
* Output from the model
```
python src/predict.py \
--image_path images/000001_0.jpg \
--model_path release/model.h5 \
--rotation -1 \
--device cpu
>>[, , 163]
```
## Screenshots
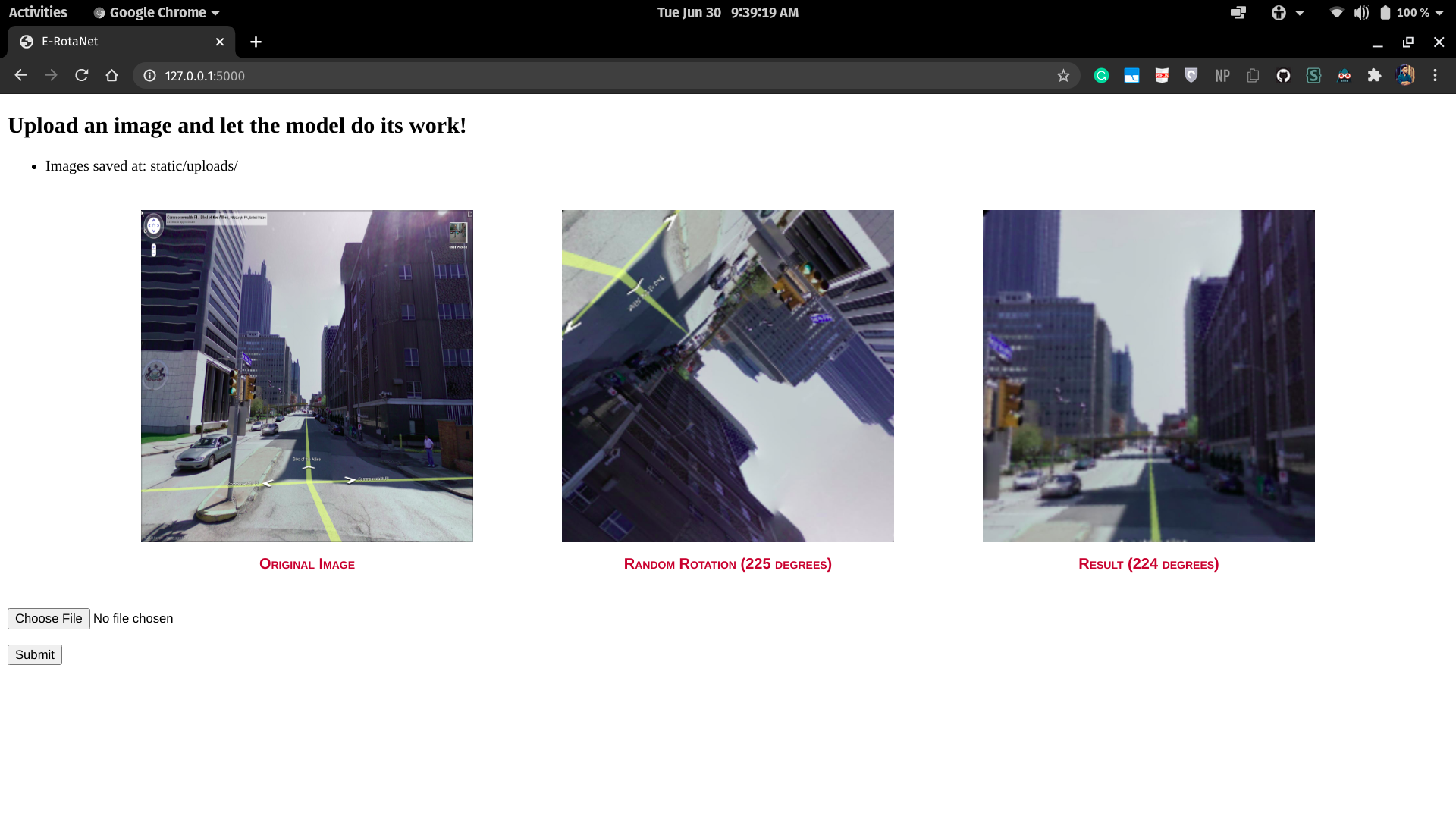
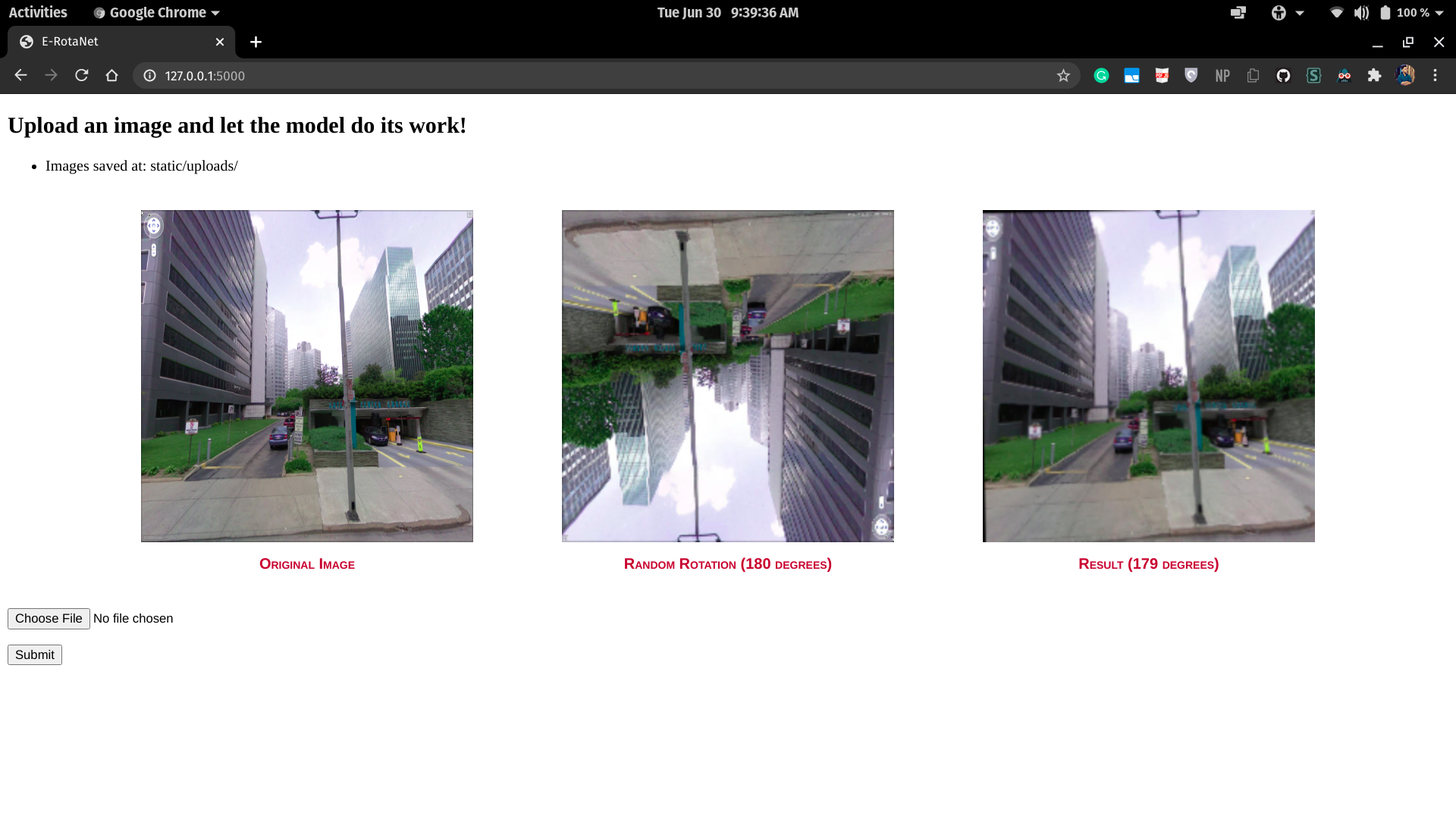
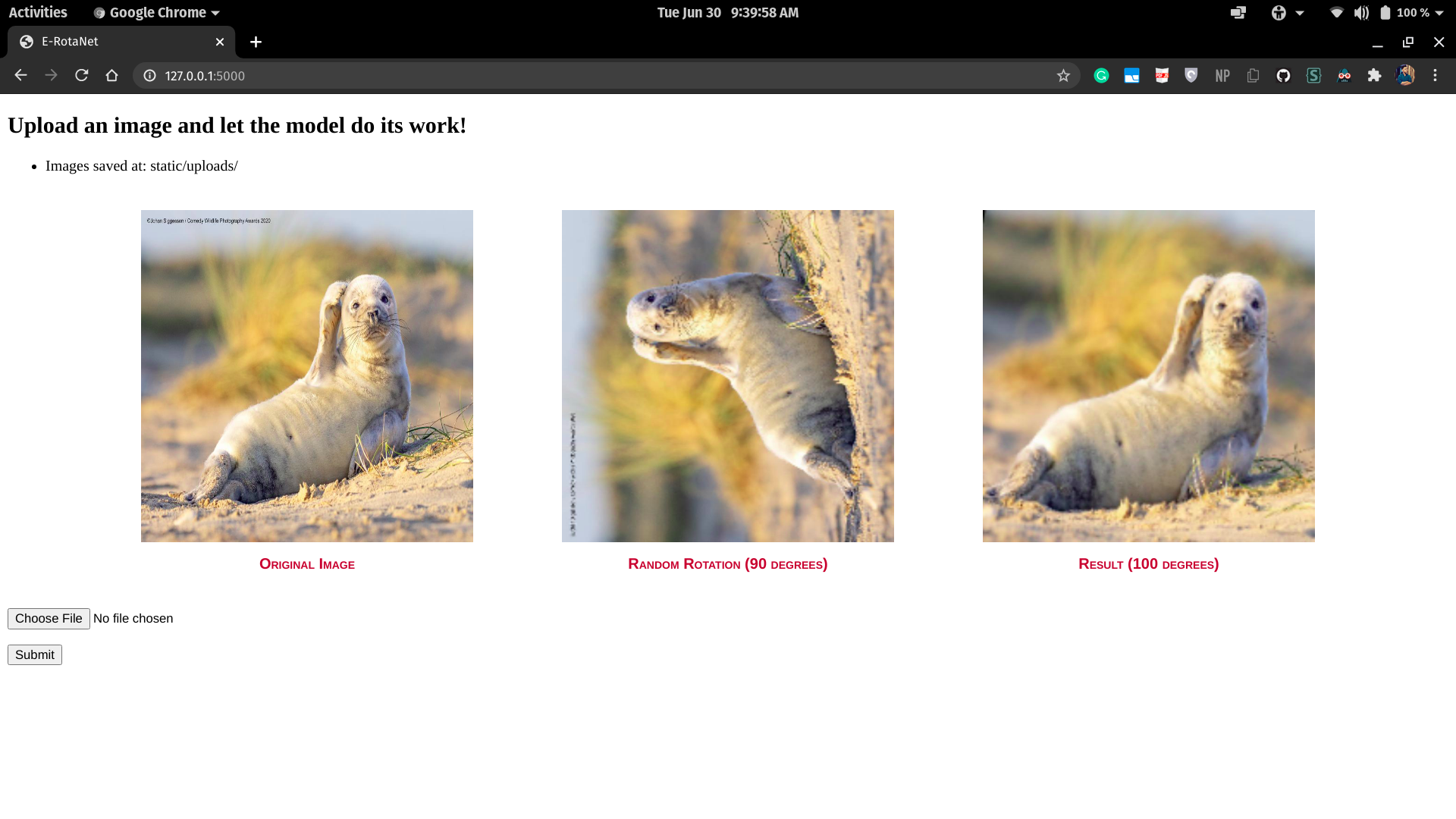
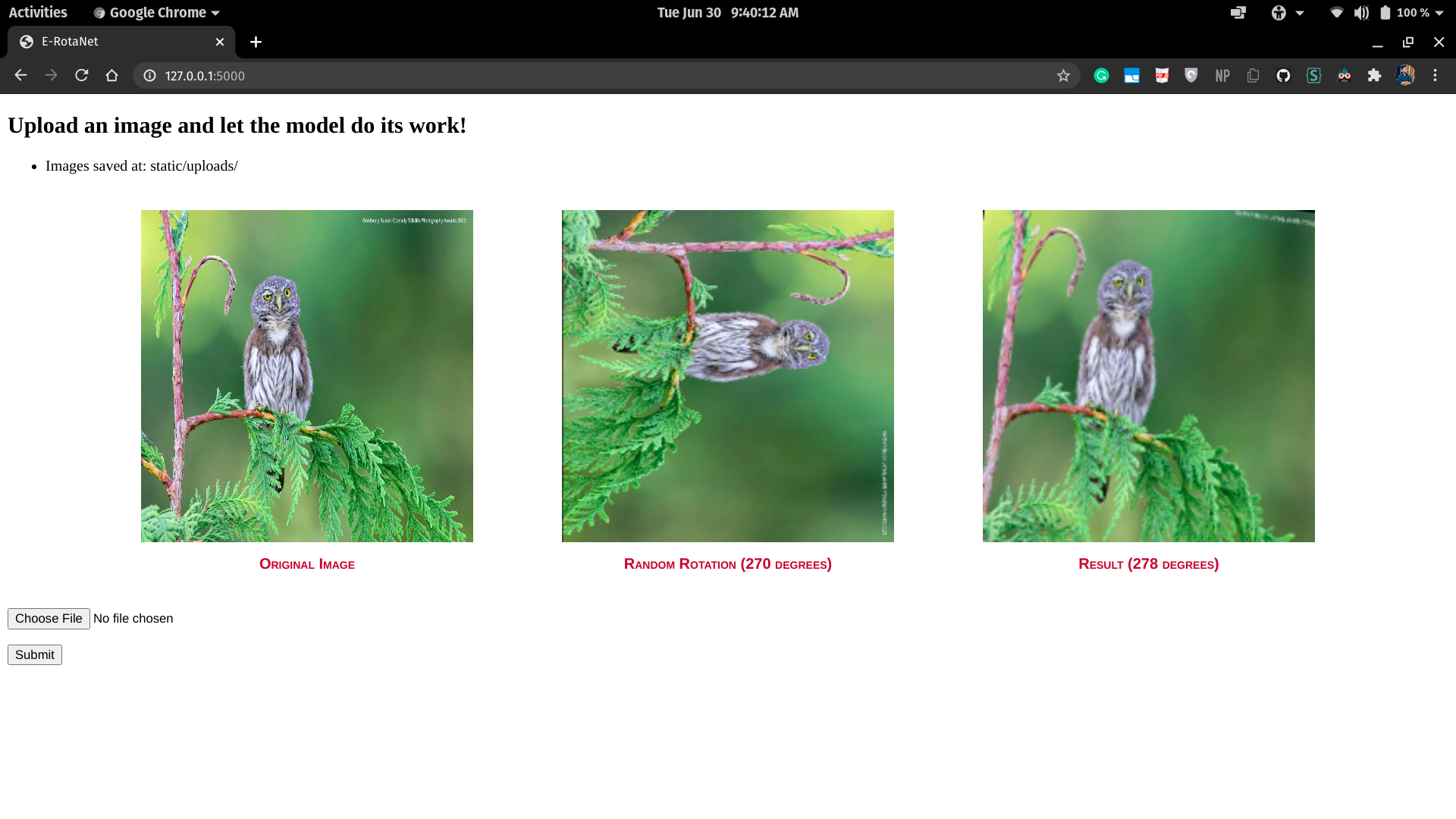
#### Note: Model is still under development