https://github.com/akerdogmus/hamer
This repository includes the Halikarnas Modular Educational Robot (HAMER) ROS Melodic packages.
https://github.com/akerdogmus/hamer
cmake gazebo hamer-robot python python3 robot robotics robotics-programming ros ros-melodic ros-noetic
Last synced: 10 months ago
JSON representation
This repository includes the Halikarnas Modular Educational Robot (HAMER) ROS Melodic packages.
- Host: GitHub
- URL: https://github.com/akerdogmus/hamer
- Owner: Akerdogmus
- License: apache-2.0
- Created: 2020-07-04T09:39:05.000Z (almost 6 years ago)
- Default Branch: noetic-devel
- Last Pushed: 2021-12-07T06:28:40.000Z (over 4 years ago)
- Last Synced: 2025-04-05T23:06:13.464Z (about 1 year ago)
- Topics: cmake, gazebo, hamer-robot, python, python3, robot, robotics, robotics-programming, ros, ros-melodic, ros-noetic
- Language: Python
- Homepage:
- Size: 4.16 MB
- Stars: 7
- Watchers: 2
- Forks: 2
- Open Issues: 0
-
Metadata Files:
- Readme: README.md
- License: LICENSE.md
Awesome Lists containing this project
README
# Halikarnas Modular Education Robot (HAMER)
       [](https://www.codefactor.io/repository/github/akerdogmus/hamer)
HAMER is a robotic project that is being developed for robotic education. This repository contains ROS Melodic (branch: melodic-devel) and ROS Noetic (branch: noetic-devel) compatible robot packages of HAMER robot.
This metapackage includes the following subpackages.

- hamer_bringup: It is a subpackage containing hardware control of HAMER robot.
- hamer_description: It is the subpackage containing urdf files of the HAMER robot.
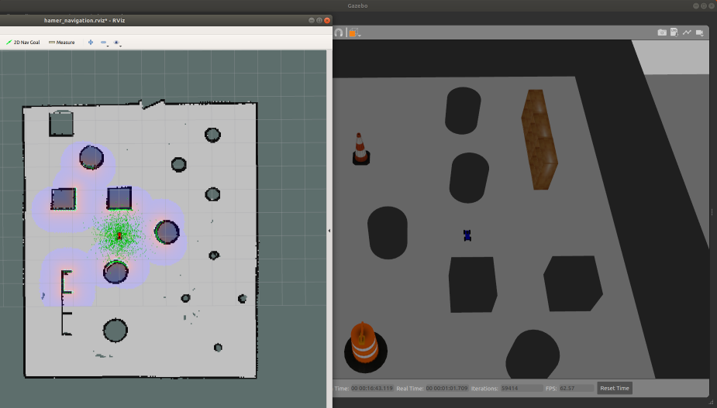
- hamer_navigation: It is the subpackage containing the navigation package files of the HAMER robot.
- hamer_simulation: It is a sub-package containing the package and launch files required for the simulation of the HAMER robot.
- hamer_slam: It is a sub-package containing the package and launch files required for mapping of the HAMER robot.
- hamer_teleop: It is a sub-package containing the codes required to control the HAMER robot from the keyboard in a simulated or hardware environment.
For HAMER_mini model : https://github.com/Akerdogmus/HAMER_mini
HAMER Installation:
-------------------
ROS Melodic version:
```bash
git clone https://github.com/Akerdogmus/hamer -b melodic-devel
```
ROS Noetic version:
```bash
git clone https://github.com/Akerdogmus/hamer -b noetic-devel
```
------------------------------------------------------------------------------
Requirements:
--------------
- In order for the sensors to work properly, "gazebo_ros_pkgs" files must be downloaded to your workspace.
```bash
git clone https://github.com/ros-simulation/gazebo_ros_pkgs.git -b noetic-devel
```
- In order for the SLAM to work, "slam_gmapping" package must be downloaded to your workspace.
```bash
git clone https://github.com/ros-perception/slam_gmapping.git -b melodic-devel
```
- In order for the "joint_state_publisher" to work, "joint_state_publisher_gui" package must be downloaded to your computer.
```bash
sudo apt update && sudo apt install ros-melodic-joint-state-publisher-gui
```
- In order for the navigation package to work, "follow_waypoint" package must be downloaded to your workspace.
(Waypoints package added and the default goal tolerance increased to 0.3 from 0.0 in phyton script to ease robot's movement.)
```bash
git clone https://github.com/danielsnider/follow_waypoints
```
---------------------------------------------------------------------------------
Some HAMER ROS Commands:
---------------------
Rviz Launching:
```bash
roslaunch hamer_simulation hamer_rviz.launch
```
Solo-Rviz Launching (v1.3 Update):
```bash
roslaunch hamer_simulation hamer_rviz_standalone.launch
```
Gazebo Launching:
```bash
roslaunch hamer_simulation hamer_gazebo.launch
```
or
```bash
roslaunch hamer_simulation hamer_gazebo_emptyworld.launch
```
or
```bash
roslaunch hamer_simulation hamer_gazebo_maze.launch
```
SLAM Launching:
```bash
roslaunch hamer_slam hamer_slam.launch
```
Teleop Launching:
```bash
rosrun hamer_teleop hamer_teleop.py
```
Navigation Launching (Added v1.1):
```bash
roslaunch hamer_navigation hamer_navigation.launch
```
NOTE: Before running keyboard code, run on terminal this codes:
```bash
cd ~/hamer_teleop/scripts && chmod +x hamer_teleop.py
```
---------------------------------------------------------------------------------
Changelog:
----------
Update v1.0 - 02.08.20
------------------------
- First version
Update v1.1 - 21.08.20
------------------------
- Added Gazebo Sonar Plugins (Now Sonar Sensors available)
- Added hamer_navigation subpackage (Now navigation tools and 2d nav goal available)
- Added new Gazebo maps and launch files
Update v1.2 - 08.09.20
----------------------
"hamer_navigation" Package Changes:
- base_local_planner parameters changed.
- costmap_common_parameters new parameters added and existing upgraded.
- Added new parameters for global_costmap and local costmap.
- costmap_converter, teb_local_planner in param folder and cfg folder in navigation package removed.
- navigation launch file: The param teb_local_planner is removed. Instead, TrajectoryPlannerRos used.
- Rviz starting added to launch file.
Update v1.3 - 07.03.21
----------------------
- HAMER is now ROS Noetic compatible.
- "hamer_rviz_standalone.launch" file added (For using HAMER Rviz without Gazebo working)
"hamer_teleop" Package Changes:
- for teleop operation Launch file added so only launch file is enough to use keyboard.
Update v1.3.1 - 16.03.21
------------------------
- Some bug and file fixes.
---------------------------------------------------------------------------------
Roadmap:
--------
* [x] Hamer Navigation subpackage
* [x] New Gazebo Maps
* [x] Hamer ROS Noetic version
* [ ] Hamer ROS2 version
* [ ] New Hamer robot model
* [ ] All Hamer subpackage rework
Extras:
--------
- If you want to control the robot with the help of an interface, not a terminal, you can install Robotic Controller Interface in your workspace.
```bash
git clone https://github.com/Akerdogmus/Robotic_Controller_Interface
```
- HAMER Robots YouTube Channel: https://www.youtube.com/channel/UCJIAVXEoZ3Qzcn72Dd_9upg/featured?disable_polymer=1
----------------------------------------------------------------------------------
Maintainer
--------------
- Alim Kerem Erdoğmuş - https://www.linkedin.com/in/alim-kerem-erdogmus/
Contributors
------------
- Enes YAZ - Navigation Subpackage Designer - https://www.linkedin.com/in/enes-yaz/
- Harun ÇOŞKUN - HAMER Robot Model Designer - https://www.linkedin.com/in/harun-%C3%A7o%C5%9Fkun-91a579159/
- Berkay YAŞAR -Test Maps Designer - https://www.linkedin.com/in/efecan-berkay-yasar/
- Samet AYDOĞAN - http://www.linkedin.com/in/samet-aydogan
- Muhammed KOCAOĞLU - Navigation Subpackage Designer - https://www.linkedin.com/in/muhammed-kocaoğlu-2b661b178/
- Fatih VATANSEVER - https://www.linkedin.com/in/fatihvatansever/
- Yağız UMUR - https://www.linkedin.com/in/yagizumur/
- Berkay YARIŞ - https://www.linkedin.com/in/berkayyaris/
Supervisor
------------
- Muhammed Oğuz TAŞ - https://www.linkedin.com/in/moguztas/
## License
See the [LICENSE](LICENSE.md) file for license rights and limitations (Apache-2.0 License).