https://github.com/arl/go-rquad
:pushpin: State of the art point location and neighbour finding algorithms for region quadtrees, in Go
https://github.com/arl/go-rquad
go quadtree
Last synced: 9 months ago
JSON representation
:pushpin: State of the art point location and neighbour finding algorithms for region quadtrees, in Go
- Host: GitHub
- URL: https://github.com/arl/go-rquad
- Owner: arl
- License: mit
- Created: 2016-09-12T21:46:37.000Z (almost 10 years ago)
- Default Branch: master
- Last Pushed: 2022-06-22T22:06:28.000Z (about 4 years ago)
- Last Synced: 2025-09-07T03:06:08.487Z (10 months ago)
- Topics: go, quadtree
- Language: Go
- Homepage:
- Size: 4.25 MB
- Stars: 139
- Watchers: 5
- Forks: 9
- Open Issues: 1
-
Metadata Files:
- Readme: README.md
- License: LICENSE
Awesome Lists containing this project
- awesome-go-extra - go-rquad - 09-12T21:46:37Z|2022-06-22T22:06:28Z| (Generators / Miscellaneous Data Structures and Algorithms)
- awesome-go-info - go-rquad
README
# Region quadtrees in Go
[](https://travis-ci.org/arl/go-rquad) [](https://coveralls.io/github/arl/go-rquad?branch=master)
[](https://goreportcard.com/report/github.com/arl/go-rquad)
[](http://godoc.org/github.com/arl/go-rquad)
**Region quadtrees and efficient neighbour finding techniques in Go**
**Go-rquad** proposes various implementations of **region quadtrees**.
A region quadtree is a special kind of quadtree that recursively
subdivides a 2 dimensional space into 4 smaller and generally equal
rectangular regions, until the wanted quadtree resolution has been reached,
or no further subdivisions can be performed.
Region quadtrees can be used for image processing; in this case a leaf node
represents a rectangular region of an image in which all colors are equal or
the color difference is under a given threshold.
Region quadtrees may also be used to represent data fields with variable
resolution. For example, the temperatures in an area may be stored as a
quadtree where each leaf node stores the average temperature over the
subregion it represents.
In this package, quadtrees implement the [`imgscan.Scanner`](https://github.com/arl/imgtools/tree/master/imgscan) interface,
this provides a way to scan (i.e extract) the pixels in order to perform the subdivisions.
## API Overview
### `Node` interface
```go
type Node interface {
Parent() Node
Child(Quadrant) Node
Bounds() image.Rectangle
Color() Color
Location() Quadrant
}
```
### `Quadtree` interface
A `Quadtree` represents a hierarchical collection of `Node`s, its API is
simple: access to the root Node and a way to iterate over all the leaves.
```go
type Quadtree interface {
ForEachLeaf(Color, func(Node))
Root() Node
}
```
### Functions
`Locate` returns the leaf node of `q` that contains `pt`, or nil if `q` doesn't contain `pt`.
```go
func Locate(q Quadtree, pt image.Point) Node
```
`ForEachNeighbour` calls `fn` for each neighbour of `n`.
```go
func ForEachNeighbour(n Node, fn func(Node))
```
### Basic implementation: `BasicTree` and `basicNode`
`BasicTree` is in many ways the standard implementation of `Quadtree`, it just does the job.
### State of the art implementation: `CNTree` and `CNNode`
`CNTree` or **Cardinal Neighbour Quadtree** implements state of the art techniques:
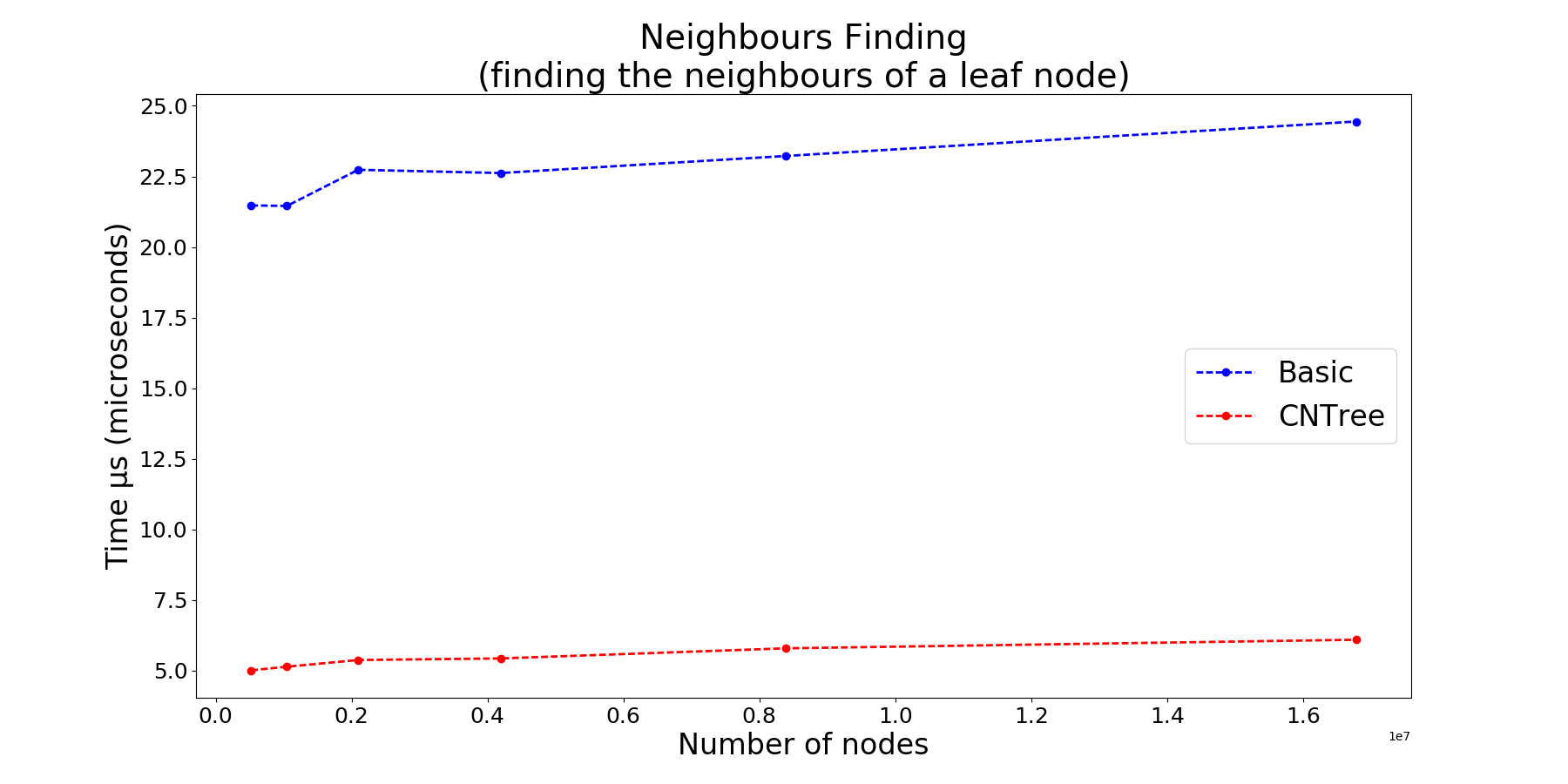
- from any given leaf node, its neighbours (of any size) are accessed in constant time *0(1)* as they implement the *Cardinal Neighbour Quadtree* technique (cf Safwan Qasem 2015). The time complexity reduction is obtained through the addition of only four pointers per leaf node in the quadtree.
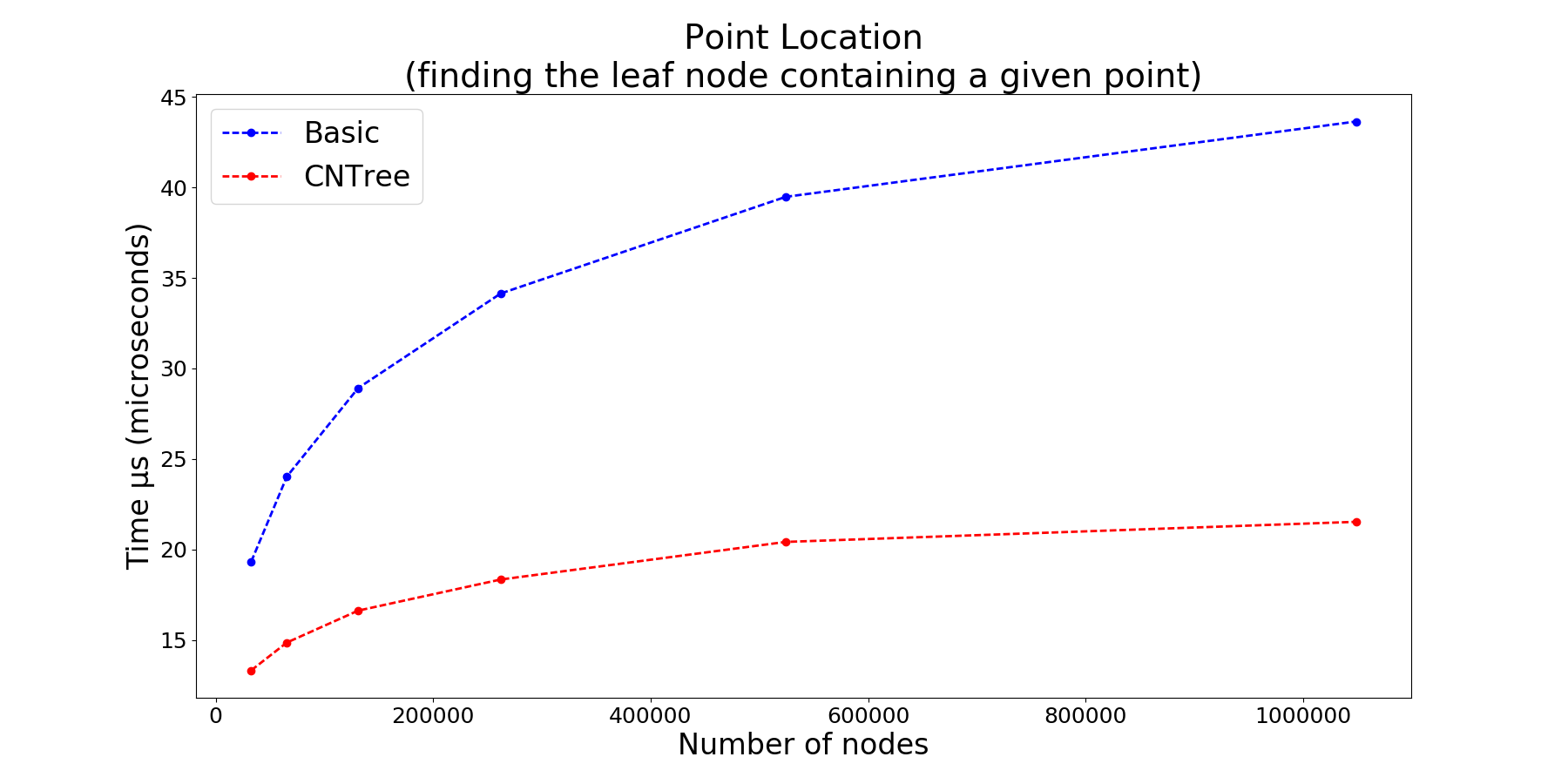
- fast point location queries (locating which leaf node contains a specific point), thanks to the *binary branching method* (cf Frisken Perry 2002). This simple and efficient method is nonrecursive, table free, and reduces the number of comparisons with
poor predictive behavior, that are otherwise required with the standard method.
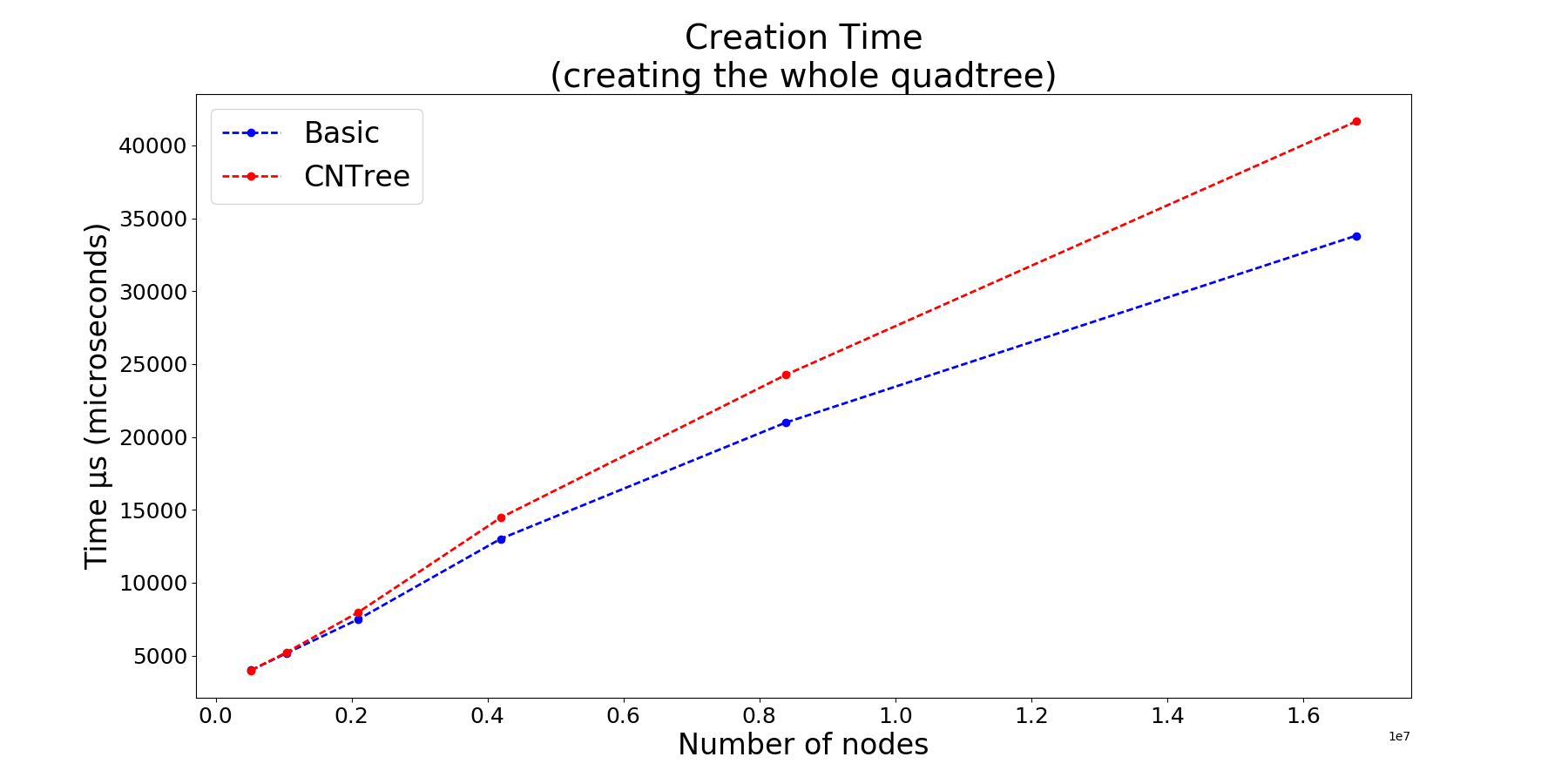
## Benchmarks
## Research papers
- Bottom-up neighour finding technique. cf Hanan Samet 1981,
*Neighbor Finding Techniques for Images Represented by Quadtrees*, [paper](https://raw.githubusercontent.com/arl/go-rquad/readme-docs/papers/a090240.pdf)
- Cardinal Neighbor Quadtree. cf Safwan Qasem 2015,
*Cardinal Neighbor Quadtree: a New Quadtree-based Structure for Constant-Time Neighbor Finding*, [paper](https://raw.githubusercontent.com/arl/go-rquad/readme-docs/papers/qasem-2015-ijca-907501.pdf)
- Fast point location using binary branching method. cf Frisken, Perry 2002
*Simple and Efficient Traversal Methods for Quadtrees and Octrees*, [paper](https://raw.githubusercontent.com/arl/go-rquad/readme-docs/papers/Simple.and.Efficient.Traversal.Methods.for.Quadtrees.TR2002-41.pdf)
## License
go-rquad is open source software distributed in accordance with the MIT
License, which says:
Copyright (c) 2016 Aurélien Rainone
Permission is hereby granted, free of charge, to any person obtaining a copy
of this software and associated documentation files (the "Software"), to deal
in the Software without restriction, including without limitation the rights
to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
copies of the Software, and to permit persons to whom the Software is
furnished to do so, subject to the following conditions:
The above copyright notice and this permission notice shall be included in
all copies or substantial portions of the Software.
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN
THE SOFTWARE.