https://github.com/bgoonz/recursion-practice-website
Recursion Prompts With Solutions and Dependency-Free Live Mocha Spec Updates.... rendered to the webpage
https://github.com/bgoonz/recursion-practice-website
algorithm algorithms javascript recursion website
Last synced: over 1 year ago
JSON representation
Recursion Prompts With Solutions and Dependency-Free Live Mocha Spec Updates.... rendered to the webpage
- Host: GitHub
- URL: https://github.com/bgoonz/recursion-practice-website
- Owner: bgoonz
- Created: 2021-02-23T18:33:10.000Z (over 5 years ago)
- Default Branch: master
- Last Pushed: 2021-10-14T19:31:52.000Z (almost 5 years ago)
- Last Synced: 2025-01-31T13:16:32.898Z (over 1 year ago)
- Topics: algorithm, algorithms, javascript, recursion, website
- Language: JavaScript
- Homepage: https://bgoonz.github.io/Recursion-Practice-Website
- Size: 45.8 MB
- Stars: 2
- Watchers: 0
- Forks: 1
- Open Issues: 2
-
Metadata Files:
- Readme: README.html
Awesome Lists containing this project
README
Document
Clarify the concept of recursion
What's the difference and connections between recursion, divide-and-conquer algorithm, dynamic programming, and
greedy algorithm? If you haven't made it clear. Doesn't matter! I would give you a brief introduction to kick
off this section.
Recursion is a programming technique. It's a way of thinking about solving problems. There're two algorithmic
ideas to solve specific problems: divide-and-conquer algorithm and dynamic programming. They're largely based on
recursive thinking (although the final version of dynamic programming is rarely recursive, the problem-solving
idea is still inseparable from recursion). There's also an algorithmic idea called greedy algorithm which can
efficiently solve some more special problems. And it's a subset of dynamic programming algorithms.
The divide-and-conquer algorithm will be explained in this section. Taking the most classic merge sort as an
example, it continuously divides the unsorted array into smaller sub-problems. This is the origin of the word
divide and conquer. Obviously, the sub-problems decomposed by the ranking problem are
non-repeating. If some of the sub-problems after decomposition are duplicated (the nature of overlapping
sub-problems), then the dynamic programming algorithm is used to solve them!
Recursion in detail
Before introducing divide and conquer algorithm, we must first understand the concept of recursion.
The basic idea of recursion is that a function calls itself directly or indirectly, which transforms the solution
of the original problem into many smaller sub-problems of the same nature. All we need is to focus on how to
divide the original problem into qualified sub-problems, rather than study how this sub-problem is solved. The
difference between recursion and enumeration is that enumeration divides the problem horizontally and then
solves the sub-problems one by one, but recursion divides the problem vertically and then solves the
sub-problems hierarchily.
The following illustrates my understanding of recursion. If you don't want to read, please just remember
how to answer these questions:
- How to sort a bunch of numbers? Answer: Divided into two halves, first align the left half, then the right
half, and finally merge. As for how to arrange the left and right half, please read this sentence again.
- How many hairs does Monkey King have? Answer: One plus the rest.
- How old are you this year? Answer: One year plus my age of last year, I was born in 1999.
Two of the most important characteristics of recursive code: end conditions and self-invocation.
Self-invocation is aimed at solving sub-problems, and the end condition defines the answer to the simplest
sub-problem.
int func(How old are you this year) {
// simplest sub-problem, end condition
if (this year equals 1999) return my age 0;
// self-calling to decompose problem
return func(How old are you last year) + 1;
}
Actually think about it, what is the most successful application of recursion? I think it's mathematical
induction. Most of us learned mathematical induction in high school. The usage scenario is
probably: we can't figure out a summation formula, but we tried a few small numbers which seemed containing a
kinda law, and then we compiled a formula. We ourselves think it shall be the correct answer. However,
mathematics is very rigorous. Even if you've tried 10,000 cases which are correct, can you guarantee the 10001th
correct? This requires mathematical induction to exert its power. Assuming that the formula we compiled is true
at the kth number, furthermore if it is proved correct at the k + 1th, then the formula we have compiled is
verified correct.
So what is the connection between mathematical induction and recursion? We just said that the recursive code must
have an end condition. If not, it will fall into endless self-calling hell until the memory exhausted. The
difficulty of mathematical proof is that you can try to have a finite number of cases, but it is difficult to
extend your conclusion to infinity. Here you can see the connection-infinite.
The essence of recursive code is to call itself to solve smaller sub-problems until the end condition is reached.
The reason why mathematical induction is useful is to continuously increase our guess by one, and expand the
size of the conclusion, without end condition. So by extending the conclusion to infinity, the proof of the
correctness of the guess is completed.
Why learn recursion
First to train the ability to think reversely. Recursive thinking is the thinking of normal people, always
looking at the problems in front of them and thinking about solutions, and the solution is the future tense;
Recursive thinking forces us to think reversely, see the end of the problem, and treat the problem-solving
process as the past tense.
Second, practice analyzing the structure of the problem. When the problem can be broken down into sub problems of
the same structure, you can acutely find this feature, and then solve it efficiently.
Third, go beyond the details and look at the problem as a whole. Let's talk about merge and sort. In fact, you
can divide the left and right areas without recursion, but the cost is that the code is extremely difficult to
understand. Take a look at the code below (merge sorting will be described later. You can understand the meaning
here, and appreciate the beauty of recursion).
void sort(Comparable[] a){
int N = a.length;
// So complicated! It shows disrespect for sorting. I refuse to study such code.
for (int sz = 1; sz < N; sz = sz + sz)
for (int lo = 0; lo < N - sz; lo += sz + sz)
merge(a, lo, lo + sz - 1, Math.min(lo + sz + sz - 1, N - 1));
}
/* I prefer recursion, simple and beautiful */
void sort(Comparable[] a, int lo, int hi) {
if (lo >= hi) return;
int mid = lo + (hi - lo) / 2;
sort(a, lo, mid); // soft left part
sort(a, mid + 1, hi); // soft right part
merge(a, lo, mid, hi); // merge the two sides
}
Looks simple and beautiful is one aspect, the key is very interpretable: sort the left half,
sort the right half, and finally merge the two sides. The non-recursive version looks unintelligible, full of
various incomprehensible boundary calculation details, is particularly prone to bugs and difficult to debug.
Life is short, i prefer the recursive version.
Obviously, sometimes recursive processing is efficient, such as merge sort, sometimes
inefficient, such as counting the hair of Monkey King, because the stack consumes extra space but
simple inference does not consume space. Example below gives a linked list header and calculate its length:
/* Typical recursive traversal framework requires extra space O(1) */
public int size(Node head) {
int size = 0;
for (Node p = head; p != null; p = p.next) size++;
return size;
}
/* I insist on recursion facing every problem. I need extra space O(N) */
public int size(Node head) {
if (head == null) return 0;
return size(head.next) + 1;
}
Tips for writing recursion
My point of view: Understand what a function does and believe it can accomplish this task. Don't try to
jump into the details. Do not jump into this function to try to explore more details, otherwise you
will fall into infinite details and cannot extricate yourself. The human brain carries tiny sized stack!
Let's start with the simplest example: traversing a binary tree.
void traverse(TreeNode* root) {
if (root == nullptr) return;
traverse(root->left);
traverse(root->right);
}
Above few lines of code are enough to wipe out any binary tree. What I want to say is that for the recursive
function traverse (root) , we just need to believe: give it a root node
root , and it
can traverse the whole tree. Since this function is written for this specific purpose, so we just need to dump
the left and right nodes of this node to this function, because I believe it can surely complete the task. What
about traversing an N-fork tree? It's too simple, exactly the same as a binary tree!
void traverse(TreeNode* root) {
if (root == nullptr) return;
for (child : root->children)
traverse(child);
}
As for pre-order, mid-order, post-order traversal, they are all obvious. For N-fork tree, there is obviously no
in-order traversal.
The following explains a problem from LeetCode in detail: Given a binary tree and a target
value, the values in every node is positive or negative, return the number of paths in the tree that are equal
to the target value, let you write the pathSum function:
/* from LeetCode PathSum III: https://leetcode.com/problems/path-sum-iii/ */
root = [10,5,-3,3,2,null,11,3,-2,null,1],
sum = 8
10
/ \
5 -3
/ \ \
3 2 11
/ \ \
3 -2 1
Return 3. The paths that sum to 8 are:
1. 5 -> 3
2. 5 -> 2 -> 1
3. -3 -> 11
/* It doesn't matter if you don't understand, there is a more detailed analysis version below, which highlights the conciseness and beauty of recursion. */
int pathSum(TreeNode root, int sum) {
if (root == null) return 0;
return count(root, sum) +
pathSum(root.left, sum) + pathSum(root.right, sum);
}
int count(TreeNode node, int sum) {
if (node == null) return 0;
return (node.val == sum) +
count(node.left, sum - node.val) + count(node.right, sum - node.val);
}
The problem may seem complicated, but the code is extremely concise, which is the charm of recursion. Let me
briefly summarize the solution process of this problem:
First of all, it is clear that to solve the problem of recursive tree, you must traverse the entire tree. So the
traversal framework of the binary tree (recursively calling the function itself on the left and right children)
must appear in the main function pathSum. And then, what should they do for each node? They should see how many
eligible paths they and their little children have under their feet. Well, this question is clear.
According to the techniques mentioned earlier, define what each recursive function should do based on the
analysis just now:
PathSum function: Give it a node and a target value. It returns the total number of paths in the tree rooted at
this node and the target value.
Count function: Give it a node and a target value. It returns a tree rooted at this node, and can make up the
total number of paths starting with the node and the target value.
/* With above tips, comment out the code in detail */
int pathSum(TreeNode root, int sum) {
if (root == null) return 0;
int pathImLeading = count(root, sum); // Number of paths beginning with itself
int leftPathSum = pathSum(root.left, sum); // The total number of paths on the left (Believe he can figure it out)
int rightPathSum = pathSum(root.right, sum); // The total number of paths on the right (Believe he can figure it out)
return leftPathSum + rightPathSum + pathImLeading;
}
int count(TreeNode node, int sum) {
if (node == null) return 0;
// Can I stand on my own as a separate path?
int isMe = (node.val == sum) ? 1 : 0;
// Left brother, how many sum-node.val can you put together?
int leftBrother = count(node.left, sum - node.val);
// Right brother, how many sum-node.val can you put together?
int rightBrother = count(node.right, sum - node.val);
return isMe + leftBrother + rightBrother; // all count i can make up
}
Again, understand what each function can do and trust that they can do it.
In summary, the binary tree traversal framework provided by the PathSum function calls the count function for
each node during the traversal. Can you see the pre-order traversal (the order is the same for this question)?
The count function is also a binary tree traversal, used to find the target value path starting with this node.
Understand it deeply!
Divide and conquer algorithm
Merge and sort, typical divide-and-conquer algorithm; divide-and-conquer, typical recursive
structure.
The divide-and-conquer algorithm can go in three steps: decomposition-> solve-> merge
- Decompose the original problem into sub-problems with the same structure.
- After decomposing to an easy-to-solve boundary, perform a recursive solution.
- Combine the solutions of the subproblems into the solutions of the original problem.
To merge and sort, let's call this function merge_sort . According to
what we said above, we must
clarify the responsibility of the function, that is, sort an incoming array. OK, can this
problem be solved? Of course! Sorting an array is just the same to sorting the two halves of the array
separately, and then merging the two halves.
void merge_sort(an array) {
if (some tiny array easy to solve) return;
merge_sort(left half array);
merge_sort(right half array);
merge(left half array, right half array);
}
Well, this algorithm is like this, there is no difficulty at all. Remember what I said before, believe in the
function's ability, and pass it to him half of the array, then the half of the array is already sorted. Have you
found it's a binary tree traversal template? Why it is postorder traversal? Because the routine of our
divide-and-conquer algorithm is decomposition-> solve (bottom)-> merge (backtracking) Ah,
first left and right decomposition, and then processing merge, backtracking is popping stack, which is
equivalent to post-order traversal. As for the merge function,
referring to the merging of two
ordered linked lists, they are exactly the same, and the code is directly posted below.
Let's refer to the Java code in book Algorithm 4 below, which is pretty.
This shows that not only
algorithmic thinking is important, but coding skills are also very important! Think more and imitate more.
public class Merge {
// Do not construct new arrays in the merge function, because the merge function will be called multiple times, affecting performance.Construct a large enough array directly at once, concise and efficient.
private static Comparable[] aux;
public static void sort(Comparable[] a) {
aux = new Comparable[a.length];
sort(a, 0, a.length - 1);
}
private static void sort(Comparable[] a, int lo, int hi) {
if (lo >= hi) return;
int mid = lo + (hi - lo) / 2;
sort(a, lo, mid);
sort(a, mid + 1, hi);
merge(a, lo, mid, hi);
}
private static void merge(Comparable[] a, int lo, int mid, int hi) {
int i = lo, j = mid + 1;
for (int k = lo; k <= hi; k++)
aux[k] = a[k];
for (int k = lo; k <= hi; k++) {
if (i > mid) { a[k] = aux[j++]; }
else if (j > hi) { a[k] = aux[i++]; }
else if (less(aux[j], aux[i])) { a[k] = aux[j++]; }
else { a[k] = aux[i++]; }
}
}
private static boolean less(Comparable v, Comparable w) {
return v.compareTo(w) < 0;
}
}
LeetCode has a special exercise of the divide-and-conquer algorithm. Copy the link below to web browser and have
a try:
https://leetcode.com/tag/divide-and-conquer/
Prompt: write a function that will reverse a string:
var reverse = function(string){
if(string.length < 2){
return string;
}
var first = string[0]
var last = string[string.length-1]; return last +reverse(string.slice(1, string.length-1)) + first; };
reverse('abcdef'); //returns 'fedcba'
//explain what a recursive function is
A function that calls itself is a recursive function.
If a function calls itself… then that function calls itself… then that function calls itself… well… then we
have
fallen into an infinite loop (a very unproductive place to be). To benefit from recursive calls, we need to
be
careful to include to give our interpreter a way to break out of the cycle of recursive function calls; we
call
this a base case.
The base case in the solution code above is as simple as testing that the length of the argument is less than
2…
and if it is, returning the the value of that argument.
Notice how each time we recursively call the reverse function, we are passing it a shorter string argument…
so
each recursive call is getting us closer to hitting our base case.
//visualize the interpreter's path through recursive function calls

Image for post
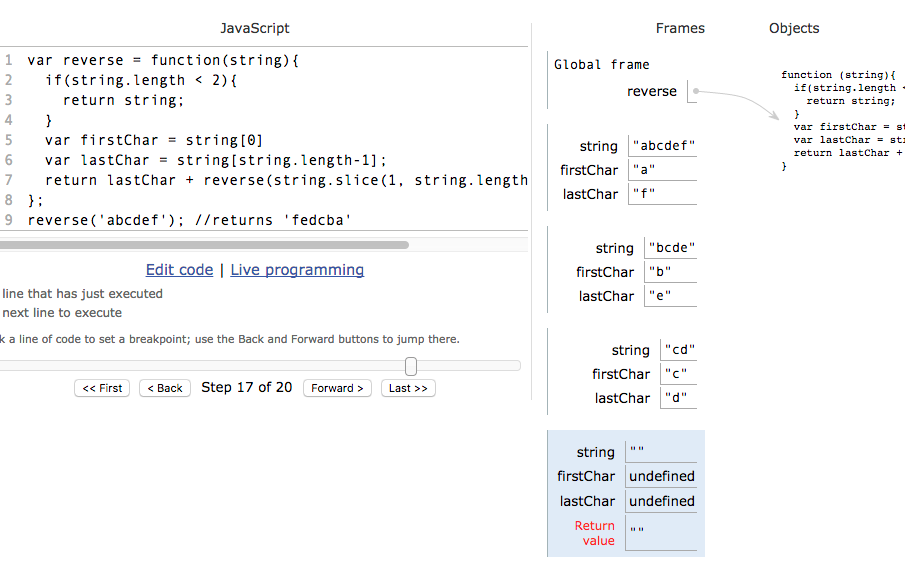
Image for post
Slow down and follow the interpreter through its execution of your algorithm (thanks to PythonTutor.com)
Python Tutor is an excellent resource for learning to visualize and trace variable values through the
multiple
execution contexts of a recursive function's invocation.
Try it now with these simple steps:
- copy the solution code from above
-
go over to http://pythontutor.com/javascript.html#mode=edit
- paste the solution code into the editor
- click the "Visualize Execution" button
- progress through the execution with the "forward" button
//when can a recursive function help me?
So if I hope that at this point that you are thinking: there is a better way to
reverse
a function, or there is a simpler way to reverse a string…
First off… simpler is better. Writing good code isn't about being clever or fancy;
good
code is about writing code that works, that makes sense to as many other minds as possible, that is time
efficient, and that is memory efficient (in order of importance). As new programers, the first of these
criteria
is obvious, and the last two are given way too much weight. It's the second of these criteria that needs to
carry much more weight in our minds and deserves the most attention. Recursive functions can be a powerful
tool
in helping us write clear and simple solutions.
To be clear: recursion is not about being fancy or clever… it is an important skill to wrestle with early
because
there will be many scenarios when employing recursion will allow for a simpler and more reliable solution
than
would be possible without recursive functions.
//more useful example
Prompt: check to see if a binary-search-tree contains a value
var searchBST = function(tree, num){
if(tree.val === num){
return true
} else if(num > tree.val){
if(tree.right === null){
return false;
} else{
return searchBST(tree.right, num);
}
} else{
if(tree.left === null){
return false;
} else{
return searchBST(tree.left, num);
}
}
}; var tree = {val: 9,
left: {val: 5,
left: null,
right: {val: 7,
left: null,
right: null}
},
right: {val: 20,
left: {val: 16,
left: null,
right: {val: 18,
left: null,
right: null}
},
right: null}
};searchBST(tree, 18) // return true
searchBST(tree, 4) // return false
When traversing trees and many other other non-primative data structures, recursion allows us to define a
clear
algorithm that elegantly handles uncertainty and complexity. Without recursion, it would be impossible to
write
a single function that could search a binary search tree of any size and state… yet by employing recursion,
we
can write a concise algorithm that will traverse any binary search tree and determine if it contains a value
or
not.
Take a moment to analyze how recursion is used in this example by tracing the interpreters path through this
solution. Just as we did for the reverse function above, paste this binary search tree code snippet into the
editor at http://pythontutor.com/javascript.html#mode=display
In this function definition, there are three base cases that will return a value instead of recursively
calling
the searchBST function… can you find them?
//now go practice using recursion
Data Structures and
Algorithms
Big O Memoization And
Tabulation
- Recursion Videos - Curating Complexity: A Guide to Big-O Notation
-
Why Big-O? - Big-O Notation - Common Complexity Classes - The
seven major classes - Memoization - Memoizing
factorial - Memoizing the Fibonacci generator - The memoization formula - Tabulation - Tabulating the Fibonacci number - Aside: Refactoring for O(1) Space - Analysis of Linear Search - Analysis of Binary Search - Analysis of the Merge Sort - Analysis of Bubble Sort - LeetCode.com -
Memoization Problems - Tabulation
Problems
Sorting Algorithms - Bubble
Sort - "But…then…why are we…"
-
The algorithm bubbles up - How does a pass of Bubble Sort work? - Ending the Bubble Sort - Pseudocode
for Bubble Sort - Selection Sort - The algorithm: select the next smallest - The pseudocode - Insertion Sort - The algorithm: insert into the sorted region -
The Steps - The pseudocode - Merge Sort - The algorithm: divide
and
conquer - Quick Sort - How does it work? -
The algorithm: divide and conquer - The pseudocode - Binary Search - The Algorithm: "check the middle and
half
the search space" - The pseudocode - Bubble Sort Analysis - Time
Complexity: O(n2) - Space Complexity: O(1) - When should you use Bubble Sort? - Selection Sort Analysis - Selection Sort JS Implementation - Time Complexity Analysis - Space Complexity Analysis: O(1) - When should we use Selection Sort? - Insertion Sort Analysis - Time and Space Complexity Analysis - When should you use Insertion Sort? - Merge Sort Analysis - Full code - Merging two sorted arrays - Divide and conquer, step-by-step - Time and Space Complexity Analysis - Quick Sort Analysis - Time
and Space Complexity Analysis - Binary Search Analysis - Time and Space Complexity Analysis - Practice: Bubble Sort - Practice:
Selection Sort - Practice: Insertion Sort - Practice: Merge Sort - Practice: Quick
Sort - Practice: Binary Search
Lists, Stacks, and Queues - Linked Lists - What is a Linked List? - Types of Linked Lists - Linked List
Methods - Time and Space Complexity Analysis -
Time Complexity - Access and Search - Time Complexity - Insertion and Deletion - Space Complexity - Stacks and Queues -
What is a Stack? - What is a Queue? - Stack and Queue Properties - Stack
Methods - Queue Methods - Time and Space Complexity Analysis - When should we use Stacks and Queues? -
Graphs and Heaps - Introduction to Heaps - Binary
Heap
Implementation - Heap Sort - In-Place
Heap
Sort -
Big O
The objective of this lesson is get you comfortable with identifying the time and
space
complexity of code you see. Being able to diagnose time complexity for algorithms is an essential
for
interviewing software engineers.
At the end of this, you will be able to
- Order the common complexity classes according to their growth rate
- Identify the complexity classes of common sort methods
- Identify complexity classes of codeable with identifying the time and space complexity of code
you see.
Being able to diagnose time complexity for algorithms is an essential for interviewing software
engineers.
At the end of this, you will be able to
- Order the common complexity classes according to their growth rate
- Identify the complexity classes of common sort methods
- Identify complexity classes of code
Memoization And Tabulation
The objective of this lesson is to give you a couple of ways to optimize a
computation
(algorithm) from a higher complexity class to a lower complexity class. Being able to optimize
algorithms is
an
essential for interviewing software engineers.
At the end of this, you will be able to
- Apply memoization to recursive problems to make them less than polynomial time.
- Apply tabulation to iterative problems to make them less than polynomial time.** is to give you
a couple
of
ways to optimize a computation (algorithm) from a higher complexity class to a lower complexity
class.
Being
able to optimize algorithms is an essential for interviewing software engineers.
At the end of this, you will be able to
- Apply memoization to recursive problems to make them less than polynomial time.
- Apply tabulation to iterative problems to make them less than polynomial time.
Recursion Videos
A lot of algorithms that we use in the upcoming days will use recursion. The next two videos are just
helpful
reminders about recursion so that you can get that thought process back into your brain.
Big-O By Colt Steele
Colt Steele provides a very nice, non-mathy introduction to Big-O notation. Please watch this so you
can get
the
easy introduction. Big-O is, by its very nature, math based. It's good to get an understanding
before
jumping in
to math expressions.
Complete Beginner's Guide to Big O Notation
by Colt
Steele.
Curating Complexity: A Guide to Big-O Notation
As software engineers, our goal is not just to solve problems. Rather, our goal is to solve problems
efficiently
and elegantly. Not all solutions are made equal! In this section we'll explore how to analyze the
efficiency
of
algorithms in terms of their speed (time complexity) and memory consumption (space
complexity).
In this article, we'll use the word efficiency to describe the amount of resources a
program
needs
to execute. The two resources we are concerned with are time and space. Our
goal is to
minimize the amount of time and space that our programs use.
When you finish this article you will be able to:
- explain why computer scientists use Big-O notation
- simplify a mathematical function into Big-O notation
Why Big-O?
Let's begin by understanding what method we should not use when describing the efficiency of
our
algorithms. Most importantly, we'll want to avoid using absolute units of time when describing
speed. When
the
software engineer exclaims, "My function runs in 0.2 seconds, it's so fast!!!", the computer
scientist is
not
impressed. Skeptical, the computer scientist asks the following questions:
- What computer did you run it on? Maybe the credit belongs to the hardware and not the
software. Some
hardware architectures will be better for certain operations than others.
- Were there other background processes running on the computer that could have effected the
runtime?
It's
hard to control the environment during performance experiments.
- Will your code still be performant if we increase the size of the input? For example,
sorting 3
numbers
is trivial; but how about a million numbers?
The job of the software engineer is to focus on the software detail and not necessarily the hardware
it will
run
on. Because we can't answer points 1 and 2 with total certainty, we'll want to avoid using concrete
units
like
"milliseconds" or "seconds" when describing the efficiency of our algorithms. Instead, we'll opt for
a more
abstract approach that focuses on point 3. This means that we should focus on how the performance of
our
algorithm is affected by increasing the size of the input. In other words, how does our
performance
scale?
The argument above focuses on time, but a similar argument could also be made for
space.
For example, we should not analyze our code in terms of the amount of absolute kilobytes of
memory it
uses,
because this is dependent on the programming language.
Big-O Notation
In Computer Science, we use Big-O notation as a tool for describing the efficiency of algorithms with
respect
to
the size of the input argument(s). We use mathematical functions in Big-O notation, so there are a
few big
picture ideas that we'll want to keep in mind:
- The function should be defined in terms of the size of the input(s).
- A smaller Big-O function is more desirable than a larger one. Intuitively, we want our
algorithms
to use a minimal amount of time and space.
- Big-O describes the worst-case scenario for our code, also known as the upper bound. We prepare
our
algorithm for the worst case, because the best case is a luxury that is not guaranteed.
- A Big-O function should be simplified to show only its most dominant mathematical term.
The first 3 points are conceptual, so they are easy to swallow. However, point 4 is typically the
biggest
source
of confusion when learning the notation. Before we apply Big-O to our code, we'll need to first
understand
the
underlying math and simplification process.
Simplifying Math Terms
We want our Big-O notation to describe the performance of our algorithm with respect to the input
size and
nothing else. Because of this, we should to simplify our Big-O functions using the following rules:
-
Simplify Products: if the function is a product of many terms, we drop the
terms that
don't depend on the size of the input.
-
Simplify Sums: if the function is a sum of many terms, we keep the term with
the
largest growth rate and drop the other terms.
We'll look at these rules in action, but first we'll define a few things:
-
n is the size of the input
-
T(f) refers to an unsimplified mathematical function
-
O(f) refers to the Big-O simplified mathematical function
Simplifying a Product
If a function consists of a product of many factors, we drop the factors that don't depend on the
size of the
input, n. The factors that we drop are called constant factors because their size remains consistent
as we
increase the size of the input. The reasoning behind this simplification is that we make the input
large
enough,
the non-constant factors will overshadow the constant ones. Below are some examples:
Unsimplified
Big-O Simplified
T( 5 * n2 )
O( n2 )
T( 100000 * n )
O( n )
T( n / 12 )
O( n )
T( 42 * n * log(n) )
O( n * log(n) )
T( 12 )
O( 1 )
Note that in the third example, we can simplify T( n / 12 ) to O( n
)
because we
can
rewrite a division into an equivalent multiplication. In other words, T( n / 12 ) = T( 1/12 *
n ) = O(
n
).
Simplifying a Sum
If the function consists of a sum of many terms, we only need to show the term that grows the
fastest,
relative
to the size of the input. The reasoning behind this simplification is that if we make the input
large
enough,
the fastest growing term will overshadow the other, smaller terms. To understand which term to keep,
you'll
need
to recall the relative size of our common math terms from the previous section. Below are some
examples:
Unsimplified
Big-O Simplified
T( n3 + n2 + n )
O( n3 )
T( log(n) + 2n )
O( 2n )
T( n + log(n) )
O( n )
T( n! + 10n )
O( n! )
Putting it all together
The product and sum rules are all we'll need to Big-O simplify any math functions.
We just
apply the product rule to drop all constants, then apply the sum rule to select
the single
most dominant term.
Unsimplified
Big-O Simplified
T( 5n2 + 99n )
O( n2 )
T( 2n + nlog(n) )
O( nlog(n) )
T( 2n + 5n1000)
O( 2n )
Aside: We'll often omit the multiplication symbol in expressions as a form of shorthand. For
example,
we'll
write O( 5n2 ) in place of O( 5 * n2 ).
RECAP
- explained why Big-O is the preferred notation used to describe the efficiency of algorithms
- used the product and sum rules to simplify mathematical functions into Big-O notation
Common Complexity Classes
Analyzing the efficiency of our code seems like a daunting task because there are many different
possibilities in
how we may choose to implement something. Luckily, most code we write can be categorized into one of
a
handful
of common complexity classes. In this reading, we'll identify the common classes and explore some of
the
code
characteristics that will lead to these classes.
When you finish this reading, you should be able to:
- name and order the seven common complexity classes
- identify the time complexity class of a given code snippet
The seven major classes
There are seven complexity classes that we will encounter most often. Below is a list of each
complexity
class as
well as its Big-O notation. This list is ordered from smallest to largest. Bear in mind
that a
"more
efficient" algorithm is one with a smaller complexity class, because it requires fewer resources.
Big-O
Complexity Class Name
O(1)
constant
O(log(n))
logarithmic
O(n)
linear
O(n * log(n))
loglinear, linearithmic, quasilinear
O(nc) - O(n2), O(n3), etc.
polynomial
O(cn) - O(2n), O(3n), etc.
exponential
O(n!)
factorial
There are more complexity classes that exist, but these are most common. Let's take a closer look at
each of
these classes to gain some intuition on what behavior their functions define. We'll explore famous
algorithms
that correspond to these classes further in the course.
For simplicity, we'll provide small, generic code examples that illustrate the complexity, although
they may
not
solve a practical problem.
O(1) - Constant
Constant complexity means that the algorithm takes roughly the same number of steps for any size
input. In a
constant time algorithm, there is no relationship between the size of the input and the number of
steps
required. For example, this means performing the algorithm on a input of size 1 takes the same
number of
steps
as performing it on an input of size 128.
Constant growth
The table below shows the growing behavior of a constant function. Notice that the behavior stays
constant for all values of n.
n
O(1)
1
~1
2
~1
3
~1
…
…
128
~1
Example Constant code
Below is are two examples of functions that have constant runtimes.
// O(1)
function constant1(n) {
return n * 2 + 1;
}
// O(1)
function constant2(n) {
for (let i = 1; i <= 100; i++) {
console.log(i);
}
}
The runtime of the constant1 function
does not depend on the size of the input, because
only two
arithmetic operations (multiplication and addition) are always performed. The runtime of the
constant2 function also does not
depend on the size of the input because one-hundred
iterations
are
always performed, irrespective of the input.
O(log(n)) - Logarithmic
Typically, the hidden base of O(log(n)) is 2, meaning O(log2(n)). Logarithmic complexity
algorithms
will usual display a sense of continually "halving" the size of the input. Another tell of a
logarithmic
algorithm is that we don't have to access every element of the input. O(log2(n)) means
that every
time we double the size of the input, we only require one additional step. Overall, this means that
a large
increase of input size will increase the number of steps required by a small amount.
Logarithmic growth
The table below shows the growing behavior of a logarithmic runtime function. Notice that doubling
the input
size
will only require only one additional "step".
n
O(log2(n))
2
~1
4
~2
8
~3
16
~4
…
…
128
~7
Example logarithmic code
Below is an example of two functions with logarithmic runtimes.
// O(log(n))
function logarithmic1(n) {
if (n <= 1) return;
logarithmic1(n / 2);
}
// O(log(n))
function logarithmic2(n) {
let i = n;
while (i > 1) {
i /= 2;
}
}
The logarithmic1 function has
O(log(n)) runtime because the recursion will half the
argument, n,
each time. In other words, if we pass 8 as the original argument, then the recursive chain would be
8 ->
4
-> 2 -> 1. In a similar way, the logarithmic2 function has O(log(n)) runtime
because of
the
number of iterations in the while loop. The while loop depends on the variable i, which
will be
divided in half each iteration.
O(n) - Linear
Linear complexity algorithms will access each item of the input "once" (in the Big-O sense).
Algorithms that
iterate through the input without nested loops or recurse by reducing the size of the input by "one"
each
time
are typically linear.
Linear growth
The table below shows the growing behavior of a linear runtime function. Notice that a change in
input size
leads
to similar change in the number of steps.
n
O(n)
1
~1
2
~2
3
~3
4
~4
…
…
128
~128
Example linear code
Below are examples of three functions that each have linear runtime.
// O(n)
function linear1(n) {
for (let i = 1; i <= n; i++) {
console.log(i);
}
}
// O(n), where n is the length of the array
function linear2(array) {
for (let i = 0; i < array.length; i++) {
console.log(i);
}
}
// O(n)
function linear3(n) {
if (n === 1) return;
linear3(n - 1);
}
The linear1 function has O(n) runtime
because the for loop will iterate n times. The
linear2 function has O(n) runtime
because the for loop iterates through the array
argument. The
linear3 function has O(n) runtime
because each subsequent call in the recursion will
decrease
the
argument by one. In other words, if we pass 8 as the original argument to linear3, the
recursive
chain would be 8 -> 7 -> 6 -> 5 -> … -> 1.
O(n * log(n)) - Loglinear
This class is a combination of both linear and logarithmic behavior, so features from both classes
are
evident.
Algorithms the exhibit this behavior use both recursion and iteration. Typically, this means that
the
recursive
calls will halve the input each time (logarithmic), but iterations are also performed on the input
(linear).
Loglinear growth
The table below shows the growing behavior of a loglinear runtime function.
n
O(n * log2(n))
2
~2
4
~8
8
~24
…
…
128
~896
Example loglinear code
Below is an example of a function with a loglinear runtime.
// O(n * log(n))
function loglinear(n) {
if (n <= 1) return;
for (let i = 1; i <= n; i++) {
console.log(i);
}
loglinear(n / 2);
loglinear(n / 2);
}
The loglinear function has O(n *
log(n)) runtime because the for loop iterates linearly
(n)
through
the input and the recursive chain behaves logarithmically (log(n)).
O(nc) - Polynomial
Polynomial complexity refers to complexity of the form O(nc) where n is the
size of
the
input and c is some fixed constant.
For example, O(n3) is a larger/worse
function
than
O(n2), but they belong to the same complexity class. Nested loops are usually the
indicator of
this
complexity class.
Polynomial growth
Below are tables showing the growth for O(n2) and O(n3).
n
O(n2)
1
~1
2
~4
3
~9
…
…
128
~16,384
n
O(n3)
1
~1
2
~8
3
~27
…
…
128
~2,097,152
Example polynomial code
Below are examples of two functions with polynomial runtimes.
// O(n^2)
function quadratic(n) {
for (let i = 1; i <= n; i++) {
for (let j = 1; j <= n; j++) {}
}
}
// O(n^3)
function cubic(n) {
for (let i = 1; i <= n; i++) {
for (let j = 1; j <= n; j++) {
for (let k = 1; k <= n; k++) {}
}
}
}
The quadratic function has
O(n2) runtime because there are nested loops. The
outer
loop
iterates n times and the inner loop iterates n times. This leads to n * n total number of
iterations. In a
similar way, the cubic function has
O(n3) runtime because it has triply
nested loops
that lead to a total of n * n * n iterations.
O(cn) - Exponential
Exponential complexity refers to Big-O functions of the form O(cn) where n is
the
size of
the input and c is some fixed
constant. For example, O(3n) is a larger/worse
function
than O(2n), but they both belong to the exponential complexity class. A common indicator
of this
complexity class is recursive code where there is a constant number of recursive calls in each stack
frame.
The
c will be the number of recursive
calls made in each stack frame. Algorithms with this
complexity
are considered quite slow.
Exponential growth
Below are tables showing the growth for O(2n) and O(3n). Notice how these grow
large,
quickly.
n
O(2n)
1
~2
2
~4
3
~8
4
~16
…
…
128
~3.4028 * 1038
n
O(3n)
1
~3
2
~9
3
~27
3
~81
…
…
128
~1.1790 * 1061
Exponential code example
Below are examples of two functions with exponential runtimes.
// O(2^n)
function exponential2n(n) {
if (n === 1) return;
exponential_2n(n - 1);
exponential_2n(n - 1);
}
// O(3^n)
function exponential3n(n) {
if (n === 0) return;
exponential_3n(n - 1);
exponential_3n(n - 1);
exponential_3n(n - 1);
}
The exponential2n function has
O(2n) runtime because each call will make two