https://github.com/blueandi/zumohalwebots
Zumo C++ hardware abstraction layer for the Webots simulation.
https://github.com/blueandi/zumohalwebots
webots zumo zumo-robot
Last synced: 6 months ago
JSON representation
Zumo C++ hardware abstraction layer for the Webots simulation.
- Host: GitHub
- URL: https://github.com/blueandi/zumohalwebots
- Owner: BlueAndi
- License: mit
- Created: 2024-05-17T14:53:48.000Z (about 2 years ago)
- Default Branch: main
- Last Pushed: 2024-11-08T15:59:20.000Z (over 1 year ago)
- Last Synced: 2025-03-29T08:43:35.683Z (over 1 year ago)
- Topics: webots, zumo, zumo-robot
- Language: C++
- Homepage: https://blueandi.github.io/ZumoHALWebots/
- Size: 354 KB
- Stars: 1
- Watchers: 2
- Forks: 1
- Open Issues: 1
-
Metadata Files:
- Readme: README.md
- License: LICENSE
Awesome Lists containing this project
README
# ZumoHALWebots
[](http://choosealicense.com/licenses/mit/)
[](https://www.repostatus.org/#wip)
[](https://github.com/BlueAndi/ZumoHALWebots/releases)
Hardware abstraction layer for the Pololu Zumo robot (see ) in the Webots simulation.
## Table of content
- [Architecture](#architecture)
- [The Principle](#the-principle)
- [Detail](#detail)
- [How to integrate the library?](#how-to-integrate-the-library)
- [Example with recommended flow](#example-with-recommended-flow)
- [Interface Description](#interface-description)
- [Requirements to your application](#requirements-to-your-application)
- [General](#general)
- [Buttons](#buttons)
- [Buzzer](#buzzer)
- [Used Libraries](#used-libraries)
- [Issues, Ideas And Bugs](#issues-ideas-and-bugs)
- [License](#license)
- [Contribution](#contribution)
## Architecture
### The Principle
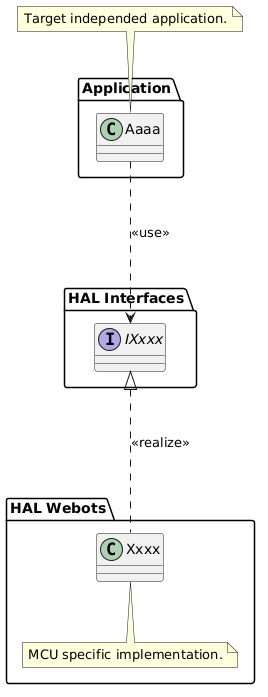
### Detail
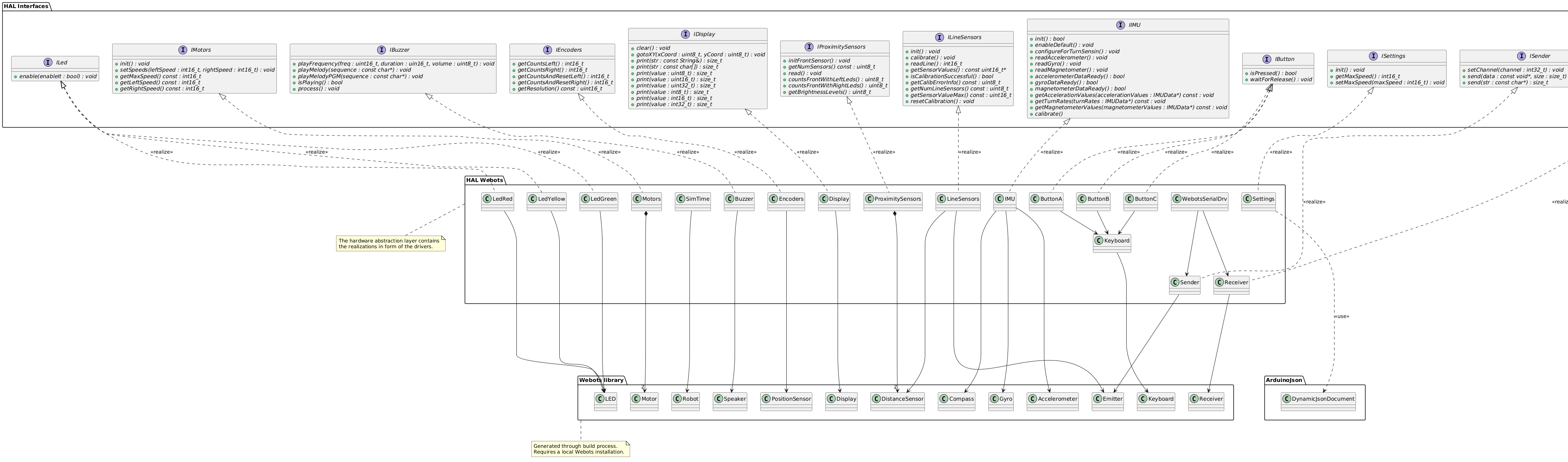
See details of the Webots library classes in the [Webots reference manual](https://cyberbotics.com/doc/reference/nodes-and-api-functions).
## How to integrate the library?
1. Add it to the _platformio.ini_ in your environment to the _lib\_deps_ section:
```text
lib_deps =
BlueAndi/ZumoHALWebots @ ~1.6.0
```
2. Add the header include search directories to the build flags.
```text
build_flags =
-I./lib/Webots/include/c
-I./lib/Webots/include/cpp
-D _USE_MATH_DEFINES
```
3. Add to your platformio environment the following scripts.
```text
extra_scripts =
pre:$PROJECT_LIBDEPS_DIR/$PIOENV/ZumoHALWebots/scripts/create_webots_library.py
pre:$PROJECT_LIBDEPS_DIR/$PIOENV/ZumoHALWebots/scripts/copy_sounds.py
post:$PROJECT_LIBDEPS_DIR/$PIOENV/ZumoHALWebots/scripts/copy_webots_shared_libs.py
```
- ```create_webots_library.py```: Generates the Webots library under the ```/lib``` folder, derived from your local Webots installation.
- ```copy_sounds.py```: Copies the sound files used for sound generation.
- ```copy_webots_shared_libs.py```: Copies the Webots shared libraries to the local platformio environment specific build folder ```.pio/build/``` as post-build step. They are required by the exectuable.
4. Integrate the following main flow to your ```main.cpp```.
5. Consider the [requirements to your application](#requirements-to-your-application).
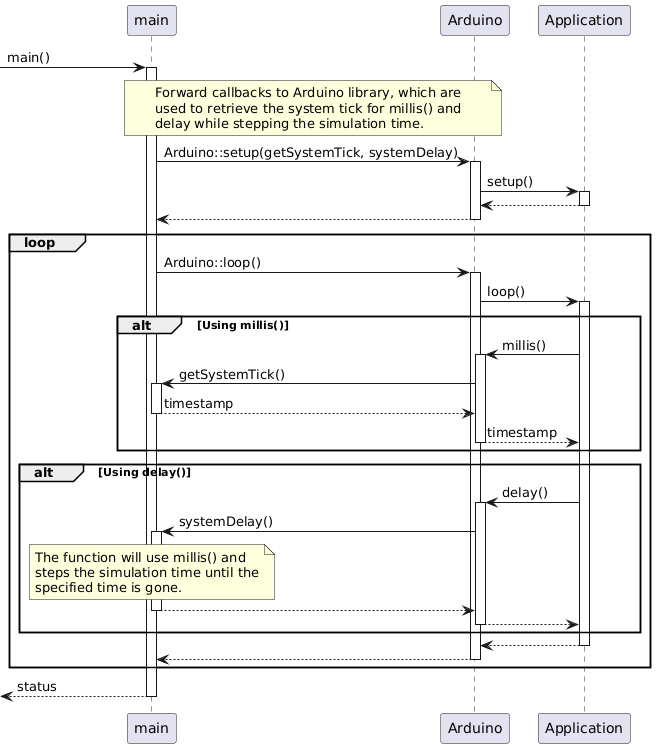
### Example with recommended flow
See [minimal example](./examples/example/).
## Interface Description
See [interface description of latest version](https://blueandi.github.io/ZumoHALWebots/).
## Requirements to your application
### General
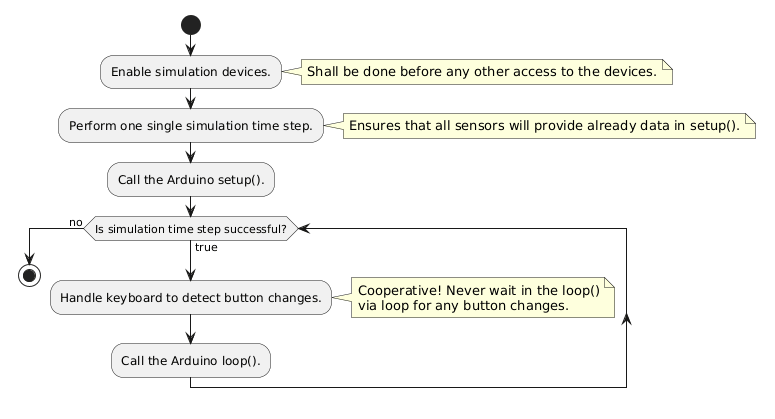
- **REQ-1** The ```SimTime::step()``` shall be called for one single simulation time step.
- **REQ-2** The ```SimTime::step()``` shall be called once before the ```Arduino::setup()``` is called.
- **REQ-3** The ```SimTime::step()``` shall be called once before the ```Arduino::loop()``` is called periodically.
- **REQ-4** The ```Keyboard::getPressedButtons()``` shall be called once before the ```Arduino::loop()``` is called periodically.
- **REQ-7** The application functions, which are running in the ```Arduino::loop()``` shall not block (cooperative behaviour).
### Buttons
- **REQ-5** The application shall never wait in an loop until a button gets released or pressed.
### Buzzer
- **REQ-6** If the application waits until ```Buzzer::isPlaying()``` returns true, the application shall call ```Buzzer::process()``` and ```delay(1U)``` in the loop.
- **INFO**:
1. The sound is stopped by the ```Buzzer::process()```. Without stopping it, the ```Buzzer::isPlaying()``` will always return true.
2. The simulation time must be stepped forward, otherwise during ```Buzzer::process()``` the sound won't stop. The workaround is here to use a ```delay()``` which internally ticks the simulation time.
## Used Libraries
| Library | Description | License |
| ------------------------------------------------------------------ | ---------------------------------------------------------------- | ---------- |
| [ArduinoNative](https://github.com/BlueAndi/ArduinoNative) | The Arduino for native environment. | MIT |
| [ArduinoJson](https://github.com/bblanchon/ArduinoJson) | JSON library for Arduino and embedded C++. Simple and efficient. | MIT |
| [Webots](https://github.com/cyberbotics/webots) | Webots physical simulation C++ API. | Apache 2.0 |
| [ZumoHALInterfaces](https://github.com/BlueAndi/ZumoHALInterfaces) | The Zumo C++ HAL interfaces. | MIT |
## Issues, Ideas And Bugs
If you have further ideas or you found some bugs, great! Create a [issue](https://github.com/BlueAndi/ZumoHALWebots/issues) or if you are able and willing to fix it by yourself, clone the repository and create a pull request.
## License
The whole source code is published under the [MIT license](http://choosealicense.com/licenses/mit/).
Consider the different licenses of the used third party libraries too!
## Contribution
Unless you explicitly state otherwise, any contribution intentionally submitted for inclusion in the work by you, shall be licensed as above, without any
additional terms or conditions.