https://github.com/cmower/optas
OpTaS: An optimization-based task specification library for trajectory optimization and model predictive control.
https://github.com/cmower/optas
forward-kinematics inverse-kinematics library model-predictive-control nonlinear optimal-control optimization planning python robotics task-specification trajectory-optimization
Last synced: about 1 year ago
JSON representation
OpTaS: An optimization-based task specification library for trajectory optimization and model predictive control.
- Host: GitHub
- URL: https://github.com/cmower/optas
- Owner: cmower
- License: other
- Created: 2022-04-28T17:48:06.000Z (about 4 years ago)
- Default Branch: master
- Last Pushed: 2025-05-01T00:14:34.000Z (about 1 year ago)
- Last Synced: 2025-05-01T01:25:40.676Z (about 1 year ago)
- Topics: forward-kinematics, inverse-kinematics, library, model-predictive-control, nonlinear, optimal-control, optimization, planning, python, robotics, task-specification, trajectory-optimization
- Language: Python
- Homepage: https://cmower.github.io/optas/
- Size: 10.7 MB
- Stars: 119
- Watchers: 3
- Forks: 16
- Open Issues: 9
-
Metadata Files:
- Readme: README.md
- License: LICENSE
- Citation: CITATION.bib
Awesome Lists containing this project
README

# OpTaS
[](https://github.com/psf/black)
[](https://github.com/cmower/optas/actions/workflows/black.yaml)
[](https://github.com/cmower/optas/actions/workflows/pytest.yaml)
[](https://github.com/cmower/optas/actions/workflows/documentation.yaml)
OpTaS is an OPtimization-based TAsk Specification library for trajectory optimization and model predictive control.
- Code: [https://github.com/cmower/optas](https://github.com/cmower/optas)
- Documentation: [https://cmower.github.io/optas/](https://cmower.github.io/optas/)
- PyPI: [https://pypi.org/project/pyoptas/](https://pypi.org/project/pyoptas/)
- Issues: [https://github.com/cmower/optas/issues](https://github.com/cmower/optas/issues)
- ICRA 2023 paper:
- (arXiv) [https://arxiv.org/abs/2301.13512](https://arxiv.org/abs/2301.13512)
- (ieee) [https://ieeexplore.ieee.org/document/10161272](https://ieeexplore.ieee.org/document/10161272)
- Video: [https://youtu.be/gCMNOenFngU](https://youtu.be/gCMNOenFngU)
- Presentation: [https://vimeo.com/824802366](https://vimeo.com/824802366)
In the past, OpTaS supported ROS from an internal module. This functionality, with additional updates, has now been moved to a dedicated repository: [optas_ros](https://github.com/cmower/optas_ros).
# Example
In this example we implement an optimization-based IK problem.
The problem computes an optimal joint configuration $q^*\in\mathbb{R}^n$ given by
$$
q^* = \underset{q}{\text{arg}\min}~\|\|q - q_N\|\|^2\quad\text{subject to}\quad p(q) = p_g, q^-\leq q \leq q^+
$$
where
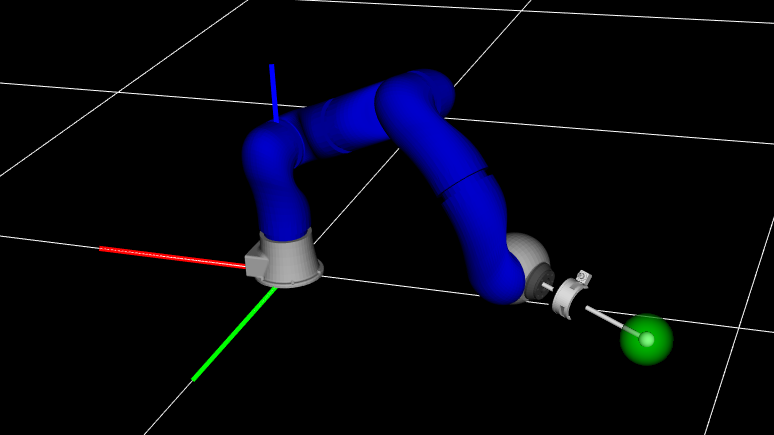
* $q\in\mathbb{R}^n$ is the joint configuration for an $n$-dof robot (in our example, we use the KUKA LWR in the above figure with $n=7$),
* $q_N\in\mathbb{R}^n$ is a nominal joint configuration,
* $\|\|\cdot\|\|$ is the Euclidean norm,
* $p: \mathbb{R}^n\rightarrow\mathbb{R}^3$ computes the end-effector position via the forward kinematics,
* $p_g\in\mathbb{R}^3$ is a goal position, and
* $q^-, q^+\in\mathbb{R}^n$ is the lower and upper joint position limits respectively.
The example problem has a quadratic cost function with nonlinear constraints.
We use the nominal configuration $q_N$ as the initial seed for the problem.
The following example script showcases some of the main features of OpTaS:
creating a robot model,
building an optimization problem,
passing the problem to a solver,
computing an optimal solution, and
visualizing the robot in a given configuration.
```python
import os
import pathlib
import optas
# Specify URDF filename
cwd = pathlib.Path(__file__).parent.resolve() # path to current working directory
urdf_filename = os.path.join(
cwd, "robots", "kuka_lwr", "kuka_lwr.urdf"
) # KUKA LWR, 7-DoF
# Setup robot model
robot = optas.RobotModel(urdf_filename=urdf_filename)
name = robot.get_name()
# Setup optimization builder
T = 1
builder = optas.OptimizationBuilder(T, robots=robot)
# Setup parameters
qn = builder.add_parameter("q_nominal", robot.ndof)
pg = builder.add_parameter("p_goal", 3)
# Constraint: end goal
q = builder.get_model_state(name, 0)
end_effector_name = "end_effector_ball"
p = robot.get_global_link_position(end_effector_name, q)
builder.add_equality_constraint("end_goal", p, pg)
# Cost: nominal configuration
builder.add_cost_term("nominal", optas.sumsqr(q - qn))
# Constraint: joint position limits
builder.enforce_model_limits(name) # joint limits extracted from URDF
# Build optimization problem
optimization = builder.build()
# Interface optimization problem with a solver
solver = optas.CasADiSolver(optimization).setup("ipopt")
# solver = optas.ScipyMinimizeSolver(optimization).setup("SLSQP")
# Specify a nominal configuration
q_nominal = optas.deg2rad([0, 45, 0, -90, 0, -45, 0])
# Get end-effector position in nominal configuration
p_nominal = robot.get_global_link_position(end_effector_name, q_nominal)
# Specify a goal end-effector position
p_goal = p_nominal + optas.DM([0.0, 0.3, -0.2])
# Reset solver parameters
solver.reset_parameters({"q_nominal": q_nominal, "p_goal": p_goal})
# Reset initial seed
solver.reset_initial_seed({f"{name}/q": q_nominal})
# Compute a solution
solution = solver.solve()
q_solution = solution[f"{name}/q"]
# Visualize the robot
vis = optas.Visualizer(quit_after_delay=2.0)
# Draw goal position and start visualizer
vis.sphere(0.05, rgb=[0, 1, 0], position=p_goal.toarray().flatten().tolist())
# vis.robot(robot, q=q_nominal,display_link_names=True,show_links=True) # nominal
vis.robot(robot, q=q_solution, display_link_names=True, show_links=True) # solution
vis.start()
```
Run the example script [example.py](example/example.py).
Other examples, including dual-arm planning, Model Predictive Control, Trajectory Optimization, etc can be found in the [example/](example) directory.
# Support
The following operating systems and python versions are [officially supported](https://github.com/cmower/optas/blob/master/.github/workflows/pytest.yaml):
* Ubuntu 20.04 and 22.04
* Python 3.7, 3.8, 3.9
* Windows
* Python 3.8, 3.9
* Mac OS
* Python 3.9
Note that OpTaS makes use of [dataclasses](https://docs.python.org/3/library/dataclasses.html) that was [introduced in Python 3.7](https://peps.python.org/pep-0557/), and so Python versions from 3.6 and lower are not supported on any operating system.
Other operating systems or higher Python versions will likely work.
If you experience problems, please [submit an issue](https://github.com/cmower/optas/issues/new/choose).
# Install
Make sure `pip` is up-to-date by running `$ python -m pip install --upgrade pip`.
## Via pip
```
$ pip install pyoptas
```
Alternatively, you can also install OpTaS using:
```
$ python -m pip install 'optas @ git+https://github.com/cmower/optas.git'
```
## From source
1. `$ git clone --recursive git@github.com:cmower/optas.git` (if you do not want to build the documentation then the `--recursive` flag is not necessary)
2. `$ cd optas`
4. `$ pip install .`
- if you want to run the examples use: `$ pip install .[example]`
- if you want to run the tests use: `$ pip install .[test]`
### Build documentation
1. `$ cd /path/to/optas/doc`
2. `$ sudo apt install doxygen graphviz`
3. `$ python gen_mainpage.py`
3. `$ doxygen`
4. Open the documentation in either HTML or PDF:
- `html/index.html`
- `latex/refman.pdf`
### Run tests
1. `$ cd /path/to/optas`
2. Each test can be run as follows
- `$ pytest tests/test_builder.py`
- `$ pytest tests/test_examples.py`
- `$ pytest tests/test_models.py`
- `$ pytest tests/test_optas_utils.py`
- `$ pytest tests/test_optimization.py`
- `$ pytest tests/test_solver.py`
- `$ pytest tests/test_spatialmath.py`
- `$ pytest tests/test_sx_container.py`
# Known Issues
- Loading robot models from xacro files is supported, however there can be issues if you are running this in a ROS agnositic environment. If you do not have ROS installed, then the xacro file should not contain ROS-specific features. For further details see [here](https://github.com/cmower/optas/issues/78).
- If NumPy ver 1.24 is installed, an `AttributeError` error is thrown when you try to solve an unconstrained problem with the OSQP interface. A temporary workaround is to add a constraint, e.g. `x >= -1e9` where `x` is a decision variable. See details on the issue [here](https://github.com/osqp/osqp-python/issues/104) and pull request [here](https://github.com/osqp/osqp-python/pull/105).
# Citation
If you use OpTaS in your work, please consider including the following citation.
```bibtex
@inproceedings{mower23optas,
author={Mower, Christopher E. and Moura, João and Behabadi, Nazanin Zamani and Vijayakumar, Sethu and Vercauteren, Tom and Bergeles, Christos},
booktitle={2023 IEEE International Conference on Robotics and Automation (ICRA)},
title={OpTaS: An Optimization-based Task Specification Library for Trajectory Optimization and Model Predictive Control},
year={2023},
volume={},
number={},
pages={9118-9124},
doi={10.1109/ICRA48891.2023.10161272}
}
```
The preprint can be found on [arXiv](https://arxiv.org/abs/2301.13512).
# Contributing
We welcome contributions from the community.
If you come across any issues or inacuracies in the documentation, please [submit an issue](https://github.com/cmower/optas/issues/new/choose).
If you would like to contribute any new features, please [fork the repository](https://github.com/cmower/optas/fork), and submit a pull request.
# Acknowledgement
This research received funding from the European Union’s Horizon 2020 research and innovation program under grant agreement No. 101016985 ([FAROS](https://h2020faros.eu/)).
Further, this work was supported by core funding from the Wellcome/EPSRC [WT203148/Z/16/Z; NS/A000049/1].
T. Vercauteren is supported by a Medtronic / RAEng Research Chair [RCSRF1819\7\34], and C. Bergeles by an ERC Starting Grant [714562].
This work has received funding from the European Union’s Horizon 2020 research and innovation programme under grant agreement No 101017008, Enhancing Healthcare with Assistive Robotic Mobile Manipulation ([HARMONY](https://harmony-eu.org/)).
