https://github.com/dnth/active-vision
Active learning for computer vision.
https://github.com/dnth/active-vision
active-learning computer-vision data-centric-ai deep-learning
Last synced: 11 days ago
JSON representation
Active learning for computer vision.
- Host: GitHub
- URL: https://github.com/dnth/active-vision
- Owner: dnth
- License: apache-2.0
- Created: 2025-01-10T02:25:24.000Z (4 months ago)
- Default Branch: main
- Last Pushed: 2025-02-06T04:51:58.000Z (3 months ago)
- Last Synced: 2025-02-06T05:31:25.074Z (3 months ago)
- Topics: active-learning, computer-vision, data-centric-ai, deep-learning
- Language: Jupyter Notebook
- Homepage: http://dicksonneoh.com/active-vision/
- Size: 79.3 MB
- Stars: 2
- Watchers: 1
- Forks: 0
- Open Issues: 9
-
Metadata Files:
- Readme: README.md
- License: LICENSE
Awesome Lists containing this project
README
[](https://pypi.org/project/active-vision/)
[](https://pypi.org/project/active-vision/)
[](https://pypi.org/project/active-vision/)
[](https://github.com/dnth/active-vision/blob/main/LICENSE)
[colab_badge]: https://img.shields.io/badge/Open%20In-Colab-blue?style=for-the-badge&logo=google-colab
[kaggle_badge]: https://img.shields.io/badge/Open%20In-Kaggle-blue?style=for-the-badge&logo=kaggle

Explore the docs »
Quickstart
·
Feature Request
·
Report Bug
·
Discussions
·
About
The goal of this project is to create a framework for the active learning loop for computer vision. The diagram below shows a general workflow of how the active learning loop works.
### Supported tasks:
- [X] Image classification
- [ ] Object detection
- [ ] Segmentation
### Supported models:
- [X] Fastai models
- [X] Torchvision models
- [X] Timm models
- [ ] Hugging Face models
### Supported Active Learning Strategies:
Uncertainty Sampling:
- [X] Least confidence
- [X] Margin of confidence
- [X] Ratio of confidence
- [X] Entropy
Diverse Sampling:
- [X] Random sampling
- [X] Model-based outlier
- [ ] Embeddings-based outlier
- [ ] Cluster-based
- [ ] Representative
## 📦 Installation
Get a release from PyPI
```bash
pip install active-vision
```
Install bleeding edge from source
```bash
pip install git+https://github.com/dnth/active-vision.git
```
Local install
```bash
git clone https://github.com/dnth/active-vision.git
cd active-vision
pip install -e .
```
> [!TIP]
> I recommend using [uv](https://docs.astral.sh/uv/) to set up a virtual environment and install the package. You can also use other virtual env of your choice.
>
> If you're using uv:
>
> ```bash
> uv venv
> uv sync
> ```
> Once the virtual environment is created, you can install the package using pip.
>
> If you're using uv add a `uv` before the pip install command to install into your virtual environment. Eg:
> ```bash
> uv pip install active-vision
> ```
## 🚀 Quickstart
[![Open In Colab][colab_badge]](https://colab.research.google.com/github/dnth/active-vision/blob/main/docs/quickstart.ipynb)
[![Open In Kaggle][kaggle_badge]](https://kaggle.com/kernels/welcome?src=https://github.com/dnth/active-vision/blob/main/docs/quickstart.ipynb)
The following are code snippets for the active learning loop in active-vision. I recommend running the quickstart notebook in Colab or Kaggle to see the full workflow.
```python
from active_vision import ActiveLearner
# Create an active learner instance
al = ActiveLearner(name="cycle-1")
# Load model
al.load_model(model="resnet18", pretrained=True)
# Load dataset
al.load_dataset(train_df, filepath_col="filepath", label_col="label")
# Train model
al.train(epochs=10, lr=5e-3)
# Evaluate the model on a *labeled* evaluation set
accuracy = al.evaluate(eval_df, filepath_col="filepath", label_col="label")
# Get summary of the active learning cycle
al.summary()
# Get predictions from an *unlabeled* set
pred_df = al.predict(filepaths)
# Sample images using a combination of active learning strategies
samples = al.sample_combination(
pred_df,
num_samples=50,
combination={
"least-confidence": 0.4,
"ratio-of-confidence": 0.2,
"entropy": 0.2,
"model-based-outlier": 0.1,
"random": 0.1,
},
)
# Launch a Gradio UI to label the samples, save the labeled samples to a file
al.label(samples, output_filename="samples.parquet")
```
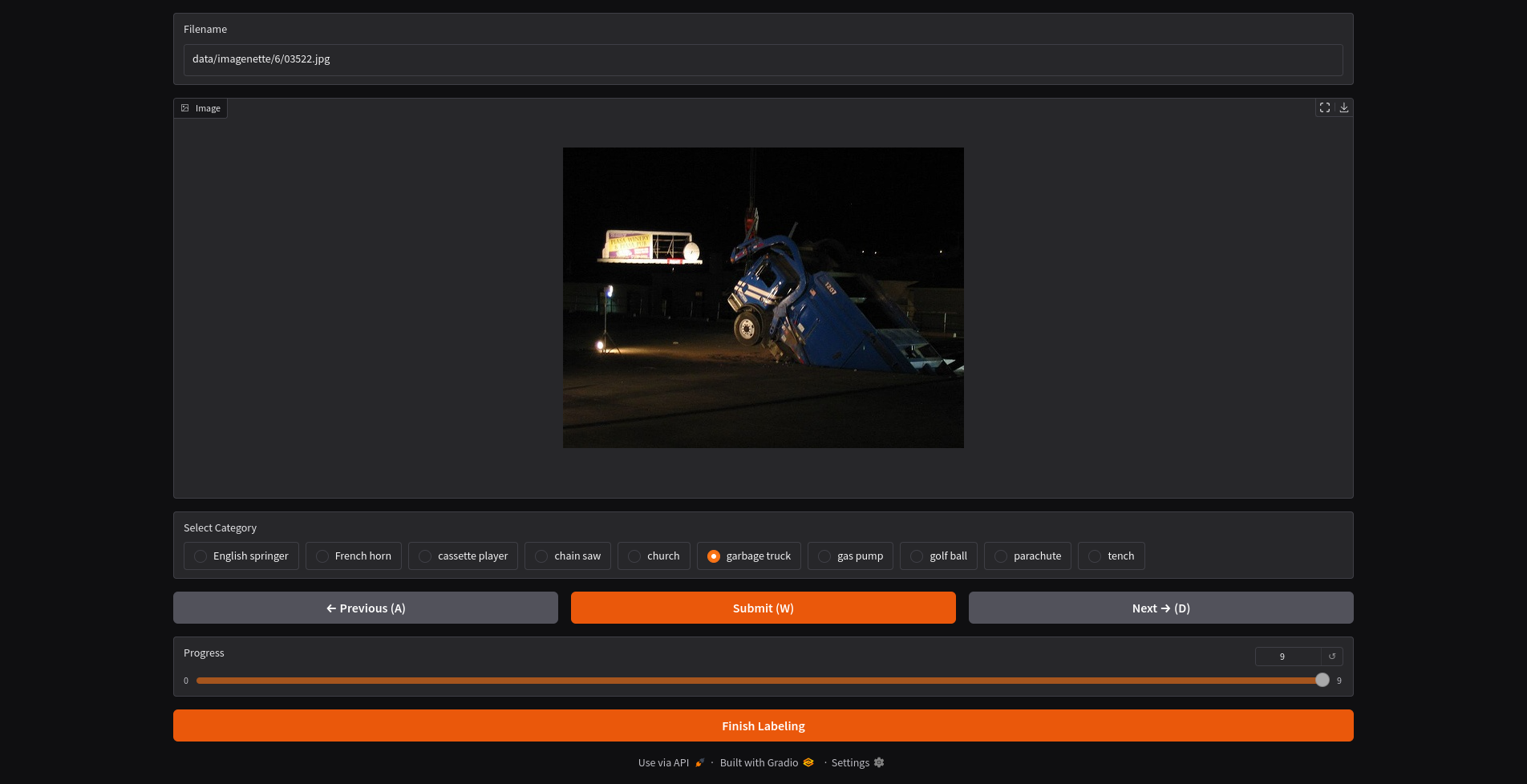
In the UI, you can optionally run zero-shot inference on the image. This will use a VLM to predict the label of the image. There are a dozen VLM models as supported in the [x.infer project](https://github.com/dnth/x.infer).

Once complete, the labeled samples will be save into a new df.
We can now add the newly labeled data to the training set.
```python
al.add_to_dataset(labeled_df, output_filename="active_labeled.parquet")
```
Repeat the process until the model is good enough. Use the dataset to train a larger model and deploy.
## 📊 Benchmarks
This section contains the benchmarks I ran using the active learning loop on various datasets.
Column description:
- `#Labeled Images`: The number of labeled images used to train the model.
- `Evaluation Accuracy`: The accuracy of the model on the evaluation set.
- `Train Epochs`: The number of epochs used to train the model.
- `Model`: The model used to train.
- `Active Learning`: Whether active learning was used to train the model.
- `Source`: The source of the results.
### Imagenette
- num classes: 10
- num images: 9469
To start the active learning loop, I labeled 100 images (10 images from each class) and iteratively relabeled the most informative images until I hit 275 labeled images.
The active learning loop is a iterative process and can keep going until you hit a stopping point. You can decide your own stopping point based on your use case. It could be:
- You ran out of data to label.
- You hit a performance goal.
- You hit a budget.
- Other criteria.
For this dataset, I decided to stop the active learning loop at 275 labeled images because the performance on the evaluation set exceeds the top performing model on the leaderboard.
| #Labeled Images | Evaluation Accuracy | Train Epochs | Model | Active Learning | Source |
|----------------: |--------------------: |-------------: |---------------------- |:---------------: |------------------------------------------------------------------------------------- |
| 9469 | 94.90% | 80 | xse_resnext50 | ❌ | [Link](https://github.com/fastai/imagenette) |
| 9469 | 95.11% | 200 | xse_resnext50 | ❌ | [Link](https://github.com/fastai/imagenette) |
| 275 | 99.33% | 6 | convnext_small_in22k | ✓ | [Link](https://github.com/dnth/active-vision/blob/main/nbs/05_retrain_larger.ipynb) |
| 275 | 93.40% | 4 | resnet18 | ✓ | [Link](https://github.com/dnth/active-vision/blob/main/nbs/04_relabel_loop.ipynb) |
### Dog Food
- num classes: 2
- num images: 2100
To start the active learning loop, I labeled 20 images (10 images from each class) and iteratively relabeled the most informative images until I hit 160 labeled images.
I decided to stop the active learning loop at 160 labeled images because the performance on the evaluation set is close to the top performing model on the leaderboard. You can decide your own stopping point based on your use case.
| #Labeled Images | Evaluation Accuracy | Train Epochs | Model | Active Learning | Source |
|----------------: |--------------------: |-------------: |---------------------- |:---------------: |--------------------------------------------------------------------------------------------- |
| 2100 | 99.70% | ? | vit-base-patch16-224 | ❌ | [Link](https://huggingface.co/abhishek/autotrain-dog-vs-food) |
| 160 | 100.00% | 6 | convnext_small_in22k | ✓ | [Link](https://github.com/dnth/active-vision/blob/main/nbs/dog_food_dataset/02_train.ipynb) |
| 160 | 97.60% | 4 | resnet18 | ✓ | [Link](https://github.com/dnth/active-vision/blob/main/nbs/dog_food_dataset/01_label.ipynb) |
### Oxford-IIIT Pet
- num classes: 37
- num images: 3680
To start the active learning loop, I labeled 370 images (10 images from each class) and iteratively relabeled the most informative images until I hit 612 labeled images.
I decided to stop the active learning loop at 612 labeled images because the performance on the evaluation set is close to the top performing model on the leaderboard. You can decide your own stopping point based on your use case.
| #Labeled Images | Evaluation Accuracy | Train Epochs | Model | Active Learning | Source |
|----------------: |--------------------: |-------------: |---------------------- |:---------------: |------------------------------------------------------------------------------------------------- |
| 3680 | 95.40% | 5 | vit-base-patch16-224 | ❌ | [Link](https://huggingface.co/walterg777/vit-base-oxford-iiit-pets) |
| 612 | 90.26% | 11 | convnext_small_in22k | ✓ | [Link](https://github.com/dnth/active-vision/blob/main/nbs/oxford_iiit_pets/02_train.ipynb) |
| 612 | 91.38% | 11 | vit-base-patch16-224 | ✓ | [Link](https://github.com/dnth/active-vision/blob/main/nbs/oxford_iiit_pets/03_train_vit.ipynb) |
### Eurosat RGB
- num classes: 10
- num images: 16100
To start the active learning loop, I labeled 100 images (10 images from each class) and iteratively labeled the most informative images until I hit 1188 labeled images.
I decided to stop the active learning loop at 1188 labeled images because the performance on the evaluation set is close to the top performing model on the leaderboard. You can decide your own stopping point based on your use case.
| #Labeled Images | Evaluation Accuracy | Train Epochs | Model | Active Learning | Source |
|----------------: |--------------------: |-------------: |---------------------- |:---------------: |-------------------------------------------------------------------------------------------- |
| 16100 | 98.55% | 6 | vit-base-patch16-224 | ❌ | [Link](https://github.com/dnth/active-vision/blob/main/nbs/eurosat_rgb/03_train_all.ipynb) |
| 1188 | 94.59% | 6 | vit-base-patch16-224 | ✓ | [Link](https://github.com/dnth/active-vision/blob/main/nbs/eurosat_rgb/02_train.ipynb) |
| 1188 | 96.57% | 13 | vit-base-patch16-224 | ✓ | [Link](https://github.com/dnth/active-vision/blob/main/nbs/eurosat_rgb/02_train.ipynb) |
### Beans
- num classes: 3
- num images: 1034
| #Labeled Images | Evaluation Accuracy | Train Epochs | Model | Active Learning | Source |
|----------------: |--------------------: |-------------: |---------------------- |:---------------: |-------------------------------------------------------------------------------------------- |
| 380 | 95.31% | 13 | vit_small_patch16_224 | ✓ | [Link](https://github.com/dnth/active-vision/blob/main/nbs/beans/active_learning.ipynb) |
| 1034 | 98.43% | 13 | vit_small_patch16_224 | ❌ | [Link](https://github.com/dnth/active-vision/blob/main/nbs/beans/train_all.ipynb) |
## 🧱 Sampling Approaches
Uncertainty and diversity sampling are most effective when combined. Some recommmendations:
- Least Confidence Sampling with Cluster-Based Sampling: This approach first selects a large sample of the most uncertain items using least confidence sampling, and then applies cluster-based sampling to ensure diversity within that selection. This method helps to select data points that are both uncertain and representative of different clusters in the data.
- Uncertainty Sampling with Model-Based Outliers: This strategy combines uncertainty sampling to find items near the decision boundary with model-based outlier detection to identify items with features that are relatively unknown to the current model. This approach aims to maximize the model's current confusion by selecting items that are both uncertain and different from the current training data.
- Uncertainty Sampling with Model-Based Outliers and Clustering: To address the issue of the previous approach potentially oversampling similar items, clustering can be applied after using uncertainty sampling with model-based outliers to ensure diversity.
- Representative Sampling with Cluster-Based Sampling: This method addresses the limitation of basic representative sampling by independently clustering both the training data and the unlabeled data. It then identifies clusters that are most representative of the unlabeled data and oversamples from those clusters. This leads to a more diverse set of items compared to representative sampling alone.
- Sampling from the Highest-Entropy Cluster: This method combines clustering with uncertainty by selecting the cluster with the highest average uncertainty (using entropy). This method aims to sample data points from the cluster that straddles the decision boundary most closely.
- Combining Active Learning Scores: Rather than filtering the output of one sampling strategy with another, this approach combines the scores from different sampling strategies and ranks items based on an aggregate score. This allows for a more nuanced approach to selecting items.
## ➿ Workflows
This section describes a more detailed workflow for active learning. There are two workflows for active learning that we can use depending on the availability of labeled data.
### With unlabeled data
If we have no labeled data, the goal of the active learning loop is to build a resonably good labeled dataset to train a larger model.
Steps:
1. Load a small proxy model.
2. Label an initial dataset. If there is none, you'll have to label some images.
3. Train the proxy model on the labeled dataset.
4. Run inference on the unlabeled dataset.
5. Evaluate the performance of the proxy model.
6. Is model good enough?
- Yes: Save the proxy model and the dataset.
- No: Select the most informative images to label using active learning.
7. Label the most informative images and add them to the dataset.
8. Repeat steps 3-6.
9. Save the proxy model and the dataset.
10. Train a larger model on the saved dataset.
```mermaid
graph TD
A[Load a small proxy model] --> B[Label an initial dataset]
B --> C[Train proxy model on labeled dataset]
C --> D[Run inference on unlabeled dataset]
D --> E[Evaluate proxy model performance]
E --> F{Model good enough?}
F -->|Yes| G[Save proxy model and dataset]
G --> H[Train and deploy a larger model]
F -->|No| I[Select informative images using active learning]
I --> J[Label selected images]
J --> C
```
### With labeled data
If we already have a labeled dataset, the goal of the active learning loop is to iteratively improve the dataset and the model by fixing the most important label errors.
Steps:
1. Load a small proxy model.
2. Train the proxy model on the labeled dataset.
3. Run inference on the entire labeled dataset.
4. Get the most impactful label errors with active learning.
5. Fix the label errors.
6. Repeat steps 2-5 until the dataset is good enough.
7. Save the labeled dataset.
8. Train a larger model on the saved labeled dataset.
```mermaid
graph TD
A[Load a small proxy model] --> B[Train proxy model on labeled dataset]
B --> C[Run inference on labeled dataset]
C --> D[Get label errors using active learning]
D --> E[Fix label errors]
E --> F{Dataset good enough?}
F -->|No| B
F -->|Yes| G[Save cleaned dataset]
G --> H[Train and deploy larger model]
```
## 📚 Acknowledgements
This project is inspired by the book [Human-in-the-Loop Machine Learning by Robert Monarch](https://www.manning.com/books/human-in-the-loop-machine-learning).