https://github.com/douglasrizzo/dodo_detector_ros
Object detection from images/point cloud using ROS
https://github.com/douglasrizzo/dodo_detector_ros
computer-vision kinect kinect-v2 object-detection opencv3 ros tensorflow tensorflow-models
Last synced: 5 months ago
JSON representation
Object detection from images/point cloud using ROS
- Host: GitHub
- URL: https://github.com/douglasrizzo/dodo_detector_ros
- Owner: douglasrizzo
- License: bsd-3-clause
- Created: 2018-10-15T19:05:43.000Z (over 7 years ago)
- Default Branch: master
- Last Pushed: 2022-08-09T17:32:46.000Z (almost 4 years ago)
- Last Synced: 2025-09-03T18:50:34.179Z (10 months ago)
- Topics: computer-vision, kinect, kinect-v2, object-detection, opencv3, ros, tensorflow, tensorflow-models
- Language: Python
- Homepage:
- Size: 68.4 KB
- Stars: 55
- Watchers: 3
- Forks: 11
- Open Issues: 1
-
Metadata Files:
- Readme: README.md
- License: LICENSE
Awesome Lists containing this project
README
# Object detection from images/point cloud using ROS
This ROS package creates an interface with [dodo detector](https://github.com/douglasrizzo/dodo_detector), a Python package that detects objects from images.
This package makes information regarding detected objects available in a topic, using a special kind of message.
When using an OpenNI-compatible sensor (like Kinect) the package uses point cloud information to locate objects in the world, wrt. to the sensor.
Click the image below for a YouTube video showcasing the package at work.
[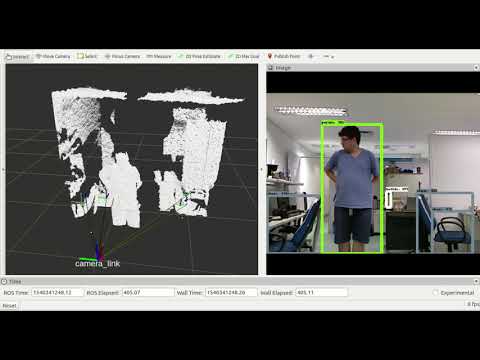](https://www.youtube.com/watch?v=fXJYmJOaSxQ)
- [Installation](#installation)
- [Usage](#usage)
- [TensorFlow-based detectors](#tensorflow-based-detectors)
- [TensorFlow 1 (for Python 2.7 and ROS Melodic Morenia downwards)](#tensorflow-1-for-python-27-and-ros-melodic-morenia-downwards)
- [TensorFlow 2 (for Python 3 and ROS Noetic Ninjemys upwards)](#tensorflow-2-for-python-3-and-ros-noetic-ninjemys-upwards)
- [OpenCV keypoint-based detectors](#opencv-keypoint-based-detectors)
- [Start the package](#start-the-package)
- [launch file examples](#launch-file-examples)
## Installation
This repo is a ROS package, so it should be put alongside your other ROS packages inside the `src` directory of your catkin workspace.
The package depends mainly on a Python package, also created by me, called [dodo detector](https://github.com/douglasrizzo/dodo_detector). Check the README file over there for a list of dependencies unrelated to ROS, but related to object detection in Python.
Other ROS-related dependencies are listed on `package.xml`. If you want to use the provided `launch` files, you are going to need `uvc_camera` to start a webcam, `freenect` to access a Kinect for Xbox 360 or [libfreenect2](https://github.com/OpenKinect/libfreenect2) and [iai_kinect2](https://github.com/code-iai/iai_kinect2) to start a Kinect for Xbox One.
If you use other kinds of sensor, make sure they provide an image topic and an optional point cloud topic, which will be needed later.
## Usage
To use the package, first open the configuration file provided in `config/main_config.yaml`. These two global parameters must be configured for all types of detectors:
- `global_frame`: the frame or tf that all object tfs will be published in relation to, eg `map`. Leave blank to publish wrt. `camera_link`.
- `tf_prefix`: a prefix for the object tfs which will be published by the package.
Then, select which type of detector the package will use by setting the `detector_type` parameter. Acceptable values are `sift`, `rootsift`, `tf1` or `tf2`.
### TensorFlow-based detectors
`tf1` and `tf2` detectors use the [TensorFlow Object Detection API](https://github.com/tensorflow/models/blob/master/research/object_detection/).
#### TensorFlow 1 (for Python 2.7 and ROS Melodic Morenia downwards)
`tf1` uses [version 1](https://github.com/tensorflow/models/blob/master/research/object_detection/g3doc/tf1.md) of the API, which works with TensorFlow 1.13 up until 1.15. It expects a label map and an inference graph. You can find these files [here](https://github.com/tensorflow/models/blob/master/research/object_detection/g3doc/tf1_detection_zoo.md) or provide your own. After you have these files, configure the following parameters in `config/main_config.yaml`:
- `inference_graph`: path to the frozen inference graph (the `.pb` file).
- `label_map`: path to the label map, (the `.pbtxt` file).
- `tf_confidence`: confidence level to report objects as detected by the neural network, between 0 and 1.
#### TensorFlow 2 (for Python 3 and ROS Noetic Ninjemys upwards)
`tf2` uses [version 2](https://github.com/tensorflow/models/blob/master/research/object_detection/g3doc/tf2.md) of the API, which works with TensorFlow 2. It expects a label map and a directory with the exported model. You can find these files [here](https://github.com/tensorflow/models/blob/master/research/object_detection/g3doc/tf2_detection_zoo.md) or provide your own. After you have these files, configure the following parameters in `config/main_config.yaml`:
- `saved_model`: path to the directory with the saved model (usually exported with the name _saved_model_ by the API).
- `label_map`: path to the label map, (the `.pbtxt` file).
- `tf_confidence`: confidence level to report objects as detected by the neural network, between 0 and 1.
Take a look [here](https://douglasrizzo.com.br/dodo_detector/#convolutional-neural-network-detector-4) to understand how these parameters are used by the backend.
### OpenCV keypoint-based detectors
If `sift` or `rootsift` are chosen, a keypoint object detector will be used. The following parameters must be set in `config/main_config.yaml`:
- `sift_min_pts`: minimum number of points to consider an object as present in the scene.
- `sift_database_path`: path to the database used by the keypoint object detector. Take a look [here](https://douglasrizzo.com.br/dodo_detector/#keypoint-based-detector) to understand how to set up the database directory.
### Start the package
After all this configuration, you are ready to start the package. Either create your own `.launch` file or use one of the files provided in the `launch` directory of the repo.
In your launch file, load the `config/main_config.yaml` file you just configured in the previous step and provide an `image_topic` parameter to the `detector.py` node of the `dodo_detector_ros` package. This is the image topic that the package will use as input to detect objects.
You can also provide a `point_cloud_topic` parameter, which the package will use to position the objects detected in the `image_topic` in 3D space by publishing a TF for each detected object.
#### launch file examples
The example below initializes a webcam feed using the *uvc_camera* package and detects objects from the `image_raw` topic:
```xml
```
The example below initializes a Kinect using the *freenect* package and subscribes to `camera/rgb/image_color` for images and `/camera/depth/points` for the point cloud:
```xml
```
This example initializes a Kinect for Xbox One, using [libfreenect2](https://github.com/OpenKinect/libfreenect2) and [iai_kinect2](https://github.com/code-iai/iai_kinect2) to connect to the device and subscribes to `/kinect2/hd/image_color` for images and `/kinect2/hd/points` for the point cloud. You can copy the launch file and use the `sd` and `qhd` topics instead of `hd` if you need more performance.
```xml
```
These three launch files are provided inside the `launch` directory.