https://github.com/dsaurus/pathplanning
https://github.com/dsaurus/pathplanning
Last synced: 10 days ago
JSON representation
- Host: GitHub
- URL: https://github.com/dsaurus/pathplanning
- Owner: DSaurus
- Created: 2020-12-26T17:15:23.000Z (over 5 years ago)
- Default Branch: master
- Last Pushed: 2020-12-27T15:01:51.000Z (over 5 years ago)
- Last Synced: 2025-02-22T18:29:25.657Z (over 1 year ago)
- Language: Python
- Size: 235 KB
- Stars: 0
- Watchers: 2
- Forks: 0
- Open Issues: 0
-
Metadata Files:
- Readme: readme.md
Awesome Lists containing this project
README
# Path Planning

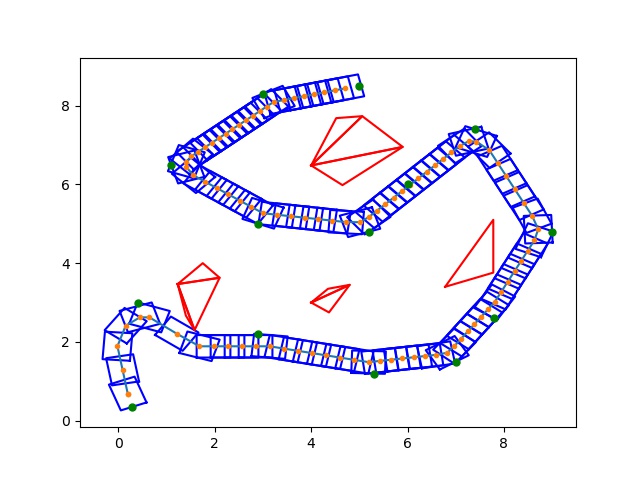
The planning requirements are as follows:
- minimize the length of the planned path as much as possible;
- vehicle must avoid all obstacles;
- vehicle must clean all "rubbishes"
- the turning angle of the vehicle should not be larger than 36 degree.
## Installation
```
pip install -r requirements.txt
cd clib
python setup.py build install
```
## How to Run?
### Dynamic Programming
Use `g++` to compile `dp.cpp` and it is directly executable.
### Optimization
To run the optimization for path planning:
```
sh run.sh
```
## Result
There are some results in the `result` folder, each folder contain two files. `checkpoint.txt` includes the optimized sample points and `test.jpg` visualizes the vehicle path.