https://github.com/ecmnet/mavslam
Visual odometry based on Intel® RealSense™ devices
https://github.com/ecmnet/mavslam
computervision obstacle-avoidance odometry px4 realsense
Last synced: over 1 year ago
JSON representation
Visual odometry based on Intel® RealSense™ devices
- Host: GitHub
- URL: https://github.com/ecmnet/mavslam
- Owner: ecmnet
- Created: 2016-03-12T14:44:03.000Z (over 10 years ago)
- Default Branch: master
- Last Pushed: 2019-10-24T14:49:16.000Z (over 6 years ago)
- Last Synced: 2025-03-26T12:51:12.997Z (over 1 year ago)
- Topics: computervision, obstacle-avoidance, odometry, px4, realsense
- Language: Java
- Homepage:
- Size: 37.7 MB
- Stars: 51
- Watchers: 5
- Forks: 12
- Open Issues: 4
-
Metadata Files:
- Readme: README.md
Awesome Lists containing this project
README
# MAVSlam - Visual odometry & SLAM for PX4
##
#### Onboard visual odometry for PX4
(Deprecated)
Integrate Intel® RealSense™ R200 depth camera as an oboard visual input source for PX4 using the [UP-Board]( http://www.up-board.org) as companion:
- Estimate position and speed based on stereo depth images up to 60 fps for LPE /EKF2
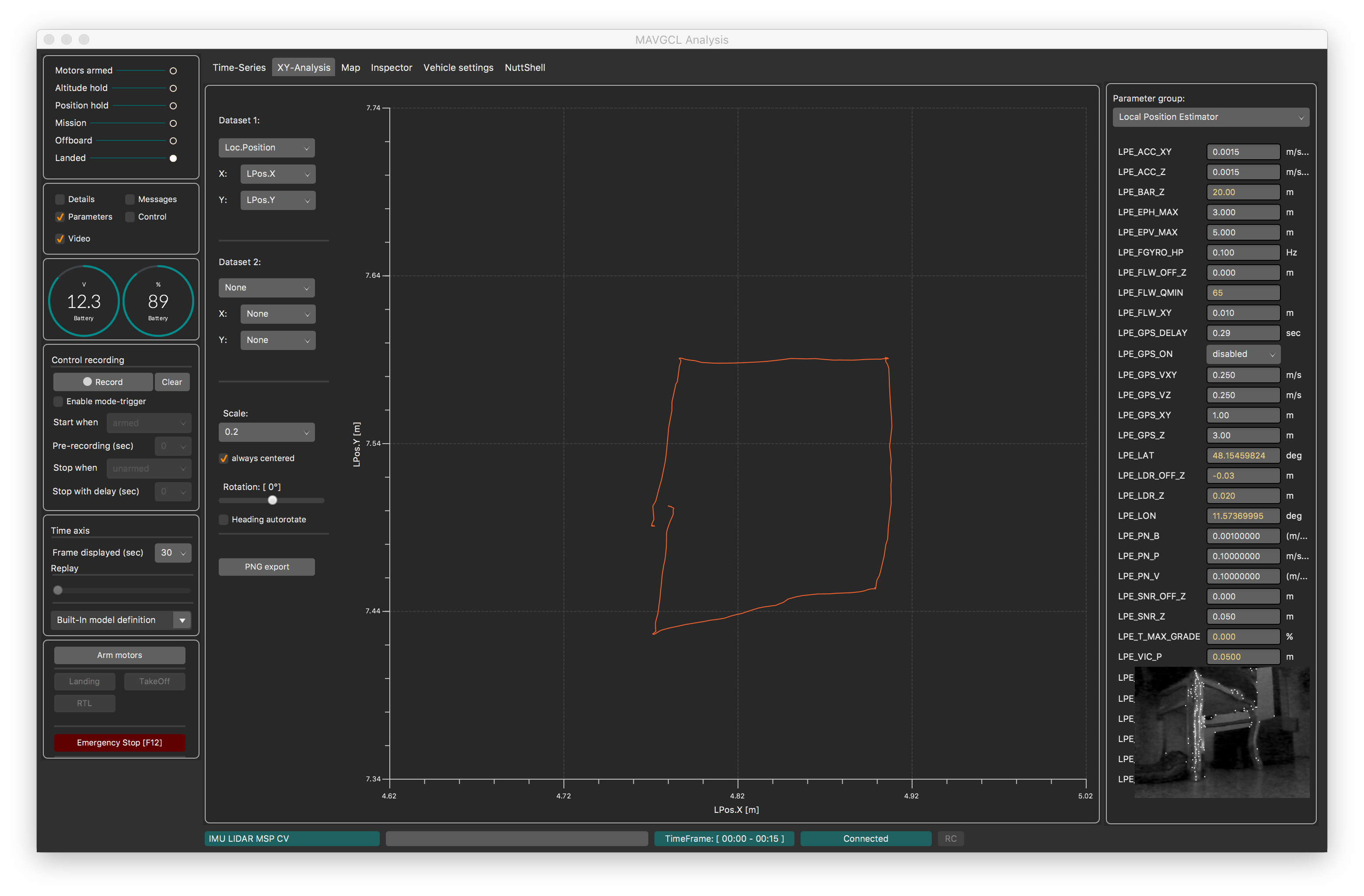
- Stream video to MAVGCL with overlays
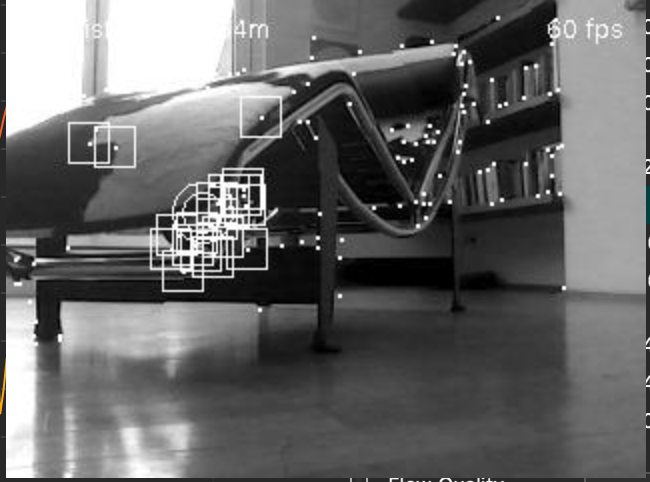
- Feature-based or depth obstacle detection
- Integration with PX4 via MAVLink ([MAVComm](https://github.com/ecmnet/MAVComm) required)
Prerequisites:
- UP-Board running Ubilinux 3.0 with Java 8 (minimum) stack connected via serial link to PX4 controller
- Intel® RealSense™ R200 (connected with external power supply)
Video:
Heading estimation:

XY Estimation:
Obstacle detection:
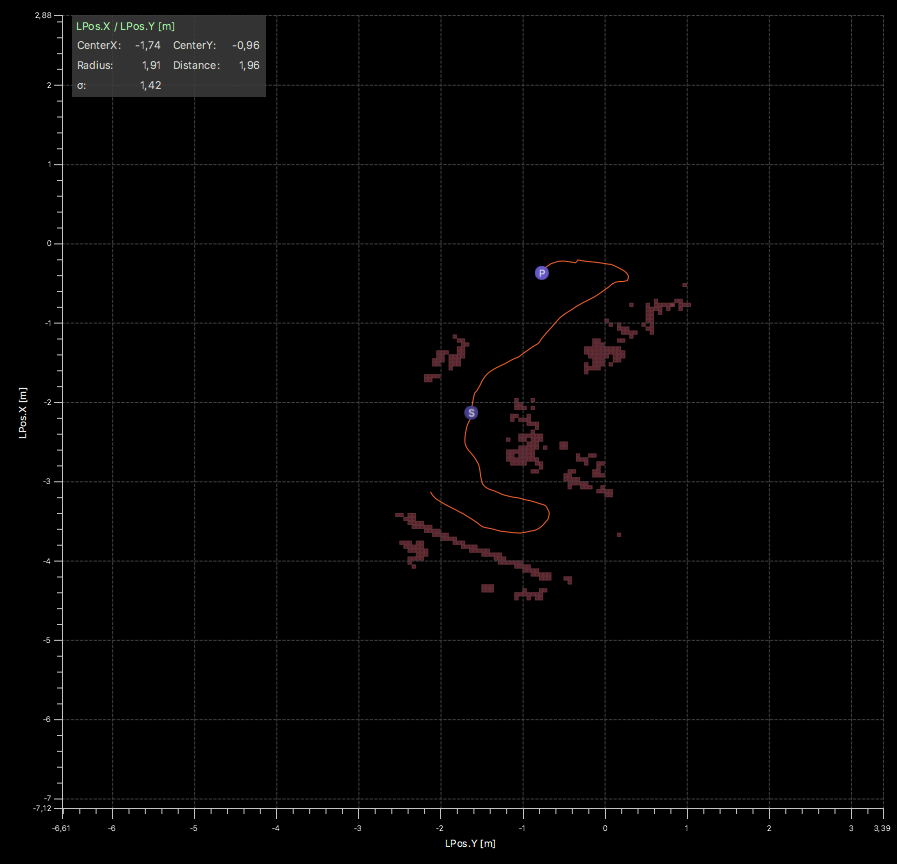
MicroSLAM:
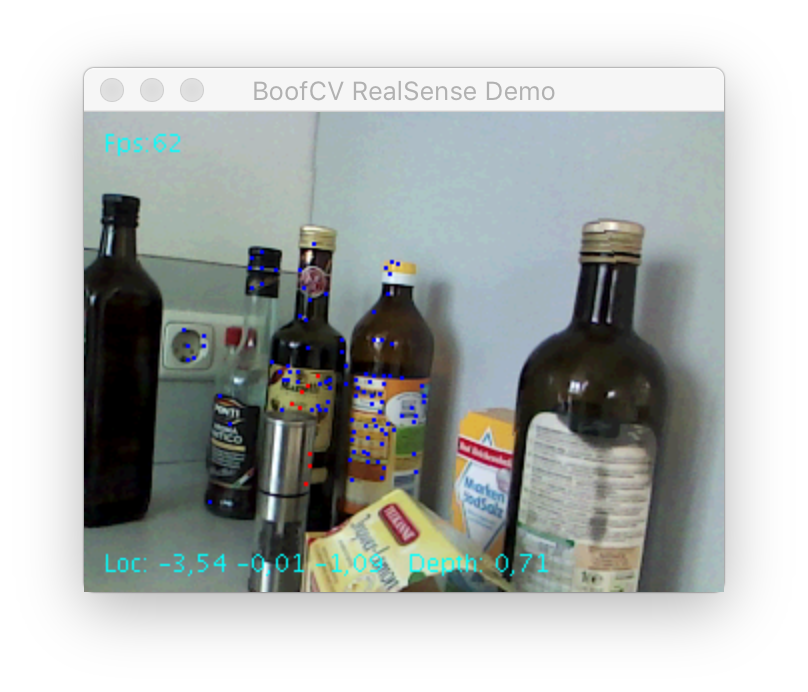
#### Desktop odometry demo
A first implementation using Intel® RealSense™ R200 with boofcv on OSX/Linux platforms. Based on https://github.com/IntelRealSense/librealsense and http://boofcv.org/index.php?title=Main_Page.