https://github.com/elggem/ros_people_model
ROS package for visual perception of people and associated attributes.
https://github.com/elggem/ros_people_model
architecture classifier detection dlib emotion face perception recognition robotics ros sensor social tensorflow visual
Last synced: 12 months ago
JSON representation
ROS package for visual perception of people and associated attributes.
- Host: GitHub
- URL: https://github.com/elggem/ros_people_model
- Owner: elggem
- License: bsd-3-clause
- Created: 2018-01-18T04:21:49.000Z (over 8 years ago)
- Default Branch: master
- Last Pushed: 2020-07-17T12:35:37.000Z (about 6 years ago)
- Last Synced: 2025-04-25T18:39:58.116Z (about 1 year ago)
- Topics: architecture, classifier, detection, dlib, emotion, face, perception, recognition, robotics, ros, sensor, social, tensorflow, visual
- Language: Python
- Homepage:
- Size: 2.57 MB
- Stars: 7
- Watchers: 2
- Forks: 6
- Open Issues: 0
-
Metadata Files:
- Readme: README.md
- License: LICENSE
Awesome Lists containing this project
README
# ros_people_model

This is a collection of perception scripts primarily aimed at use in a social robotics context. It combines various Deep Learning classifiers to build a model of people and their attributes. Working so far are modules for:
- Detection of [68 Face landmarks](http://dlib.net/face_landmark_detection.py.html) to be used by classifiers based on Dlib 68 Landmark
- Face ID using the [128D vector embedding from Dlib](https://github.com/davisking/dlib/blob/master/examples/dnn_face_recognition_ex.cpp), in addition with some simple clustering logic
- Emotion recognition using [iCog Emopy](https://github.com/mitiku1/Emopy)
- Eyes closed detection based on [iCog EyeState Detection](https://github.com/mitiku1/EyeStateDetection)
In addition this repository contains some config files and experimental scripts for use of this package on Hanson Robotics humanoid robots.
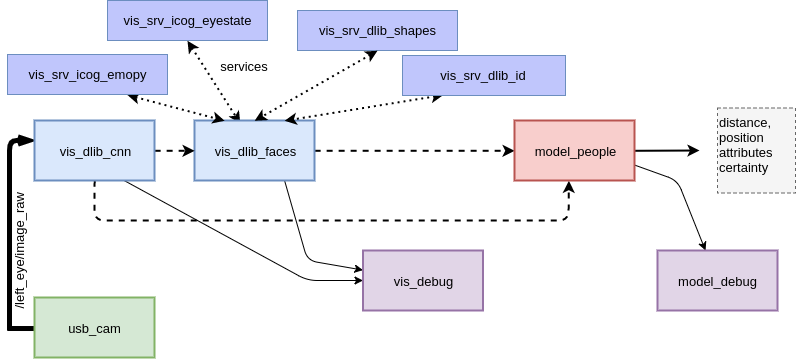
## API & message types
Currently, there are two publishers in `ros_peoplemodel`. One that outputs the integrated raw perceptions from the various modules at the topic `/vis_dlib_faces`, the other one applies some probabilistic smoothing of position and attributes and is published on `/faces`. You can demo this by launching the `vis_debug.py` script for raw perceptions and `model_debug.py` for probabilistic model.
Raw output at `/vis_dlib_faces` outputs raw array of Feature.msg messages, which include the following information. Note that all attributes can be empty in case of detection failure.
```
# Required fields:
sensor_msgs/Image crop
sensor_msgs/RegionOfInterest roi
# Optional fields
geometry_msgs/Point[] shapes
string face_id
float32[] emotions
float32[] eye_states
```
Probabilistic output at `/faces` outputs the following Feature.msg message. Note the added information of position and certainty added in this stage. Also note that all attributes can be empty in case of detection failure.
```
# Required fields:
sensor_msgs/Image crop
# World coordinates:
geometry_msgs/Point position
float32 certainty
# Attributes
geometry_msgs/Point[] shapes
string face_id
float32[] emotions
float32[] eye_states
```
## Dependencies
Most of the modules used depend on GPU accelerated Dlib or Tensorflow. In order to use it please do the following:
1. Install compatible NVIDIA drivers, [CUDA](https://developer.nvidia.com/cuda-90-download-archive) and [cuDNN](https://developer.nvidia.com/cudnn).
2. Install [Dlib](http://dlib.net/compile.html) from source using graphics acceleration support (after compilation and all dependencies are installed, follow the instructions for Compiling Dlib's Python Interface)
3. Install tensorflow-gpu.
4. Install additional dependencies `numpy`, `scikit-images`, `opencv`.
Upon first launch the system will download the necessary classifier models and extract them to the home folder of the user in `~/.dlib`.
## Usage
In `launch/` there are several scripts to test the architecture:
- `webcam_single.launch`: Can be used to launch the /camera node that will publish camera image.
- `perception.launch`: Launches the entire architecture as described above.
- In addition `scripts/vis_debug.py` will show a window for debugging output of the raw visual perception scripts.
- In addition `scripts/model_debug.py` will show a window for debugging the output of model_people node, which fuses the various visual classifiers into a model of perceived faces.
## Roadmap
- Integration with a classifier for speaking detection
- Eventual integration with directional microphone to map what is spoken to individual faces.
- Integration with OpenPose and various classifiers for
- Body pose estimation (sitting, standing, waving, etc.)
- Hand pose estimation (open palm, fist, etc.)
- Integration wih Masked RCNN architectures to detect various categories of objects in the hands of people.
- Better packaging and setup.py