https://github.com/ethanhe42/kl-loss
Bounding Box Regression with Uncertainty for Accurate Object Detection (CVPR'19)
https://github.com/ethanhe42/kl-loss
detection detection-algorithm detection-model detection-network object-detection pytorch
Last synced: about 1 year ago
JSON representation
Bounding Box Regression with Uncertainty for Accurate Object Detection (CVPR'19)
- Host: GitHub
- URL: https://github.com/ethanhe42/kl-loss
- Owner: ethanhe42
- License: apache-2.0
- Created: 2019-03-01T04:47:09.000Z (over 7 years ago)
- Default Branch: master
- Last Pushed: 2024-04-07T06:36:01.000Z (about 2 years ago)
- Last Synced: 2024-04-13T06:57:54.133Z (about 2 years ago)
- Topics: detection, detection-algorithm, detection-model, detection-network, object-detection, pytorch
- Language: Python
- Homepage: https://yihui.dev/bounding-box-regression-with-uncertainty-for-accurate-object-detection
- Size: 5.04 MB
- Stars: 704
- Watchers: 22
- Forks: 103
- Open Issues: 8
-
Metadata Files:
- Readme: README.md
- Contributing: CONTRIBUTING.md
- Funding: .github/FUNDING.yml
- License: LICENSE
- Code of conduct: CODE_OF_CONDUCT.md
Awesome Lists containing this project
README
# Bounding Box Regression with Uncertainty for Accurate Object Detection
[GitHub - yihui-he/KL-Loss: Bounding Box Regression with Uncertainty for Accurate Object Detection (CVPR'19)](https://github.com/yihui-he/KL-Loss)
[CVPR 2019 Open Access Repository](https://openaccess.thecvf.com/content_CVPR_2019/html/He_Bounding_Box_Regression_With_Uncertainty_for_Accurate_Object_Detection_CVPR_2019_paper.html)
**CVPR 2019** [[presentation (youtube)]](https://www.youtube.com/watch?v=bcGtNdTzdkc)
[Yihui He](http://yihui-he.github.io/), [Chenchen Zhu](https://sites.google.com/andrew.cmu.edu/zcckernel), [Jianren Wang](https://scholar.google.com/citations?user=NL8MDkwAAAAJ&hl=en), [Marios Savvides](http://www.cmu-biometrics.org/), [Xiangyu Zhang](https://scholar.google.com/citations?user=yuB-cfoAAAAJ&hl=en&oi=ao), Carnegie Mellon University & Megvii Inc.
[https://www.youtube.com/embed/bcGtNdTzdkc](https://www.youtube.com/embed/bcGtNdTzdkc)
### Table of Contents
1. [Citation](about:blank#citation)
2. [Installation](about:blank#installation)
3. [Testing](about:blank#testing)
4. [Training](about:blank#training)
5. [PyTorch re-implementations](about:blank#pytorch-re-implementations)
6. [FAQ](about:blank#faq)
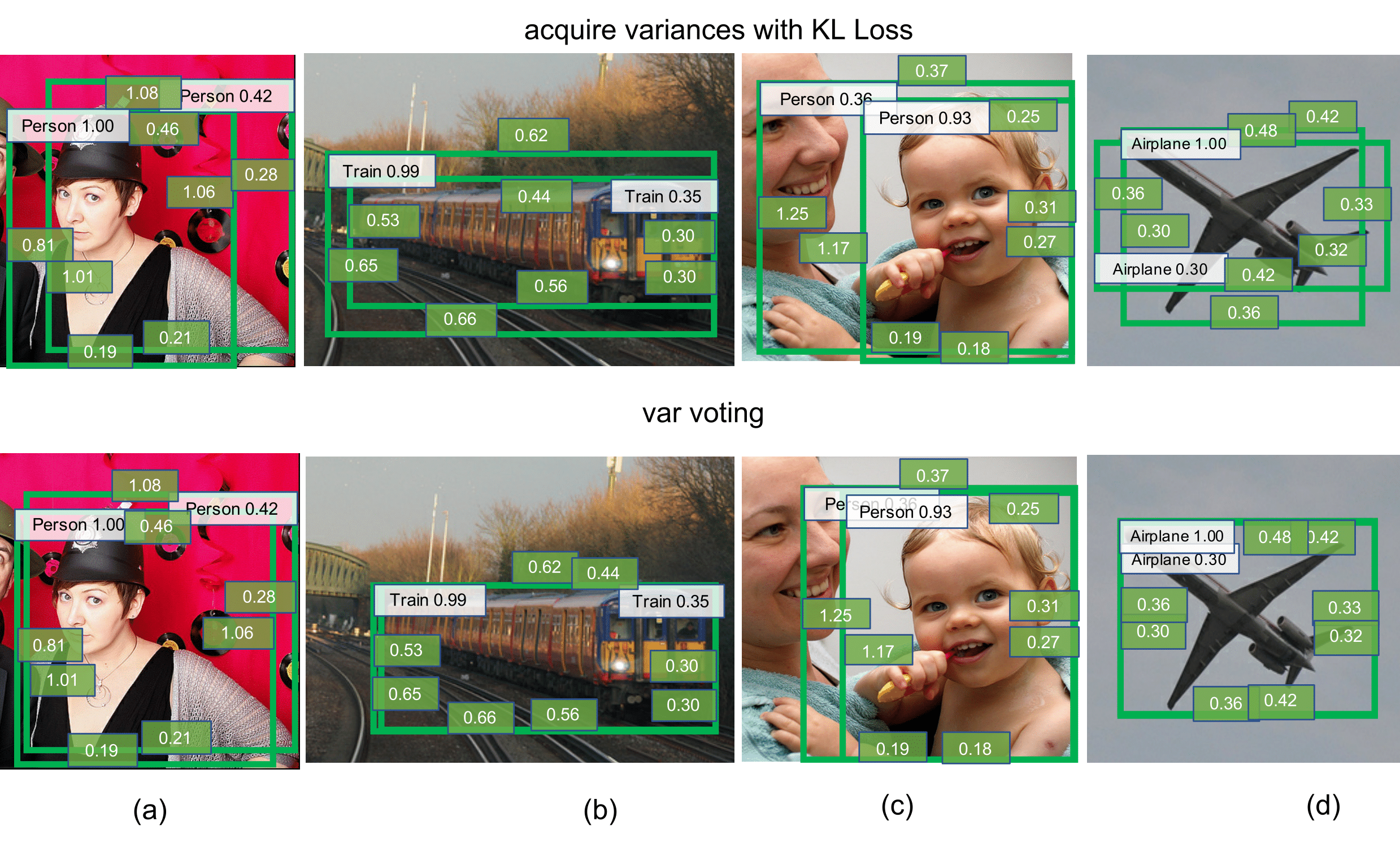
Large-scale object detection datasets (e.g., MS-COCO) try to define the ground truth bounding boxes as clear as possible. However, we observe that ambiguities are still introduced when labeling the bounding boxes. In this paper, we propose a novel bounding box regression loss for learning bounding box transformation and localization variance together. Our loss greatly improves the localization accuracies of various architectures with nearly no additional computation. The learned localization variance allows us to merge neighboring bounding boxes during non-maximum suppression (NMS), which further improves the localization performance. On MS-COCO, we boost the Average Precision (AP) of VGG-16 Faster R-CNN from 23.6% to 29.1%. More importantly, for ResNet-50-FPN Mask R-CNN, our method improves the AP and AP90 by **1.8%** and **6.2%** respectively, which significantly outperforms previous state-of-the-art bounding box refinement methods.
### Citation
If you find the code useful in your research, please consider citing:
```
@InProceedings{klloss,
author = {He, Yihui and Zhu, Chenchen and Wang, Jianren and Savvides, Marios and Zhang, Xiangyu},
title = {Bounding Box Regression With Uncertainty for Accurate Object Detection},
booktitle = {The IEEE Conference on Computer Vision and Pattern Recognition (CVPR)},
month = {June},
year = {2019}
}
```
### Installation
Please find installation instructions for Caffe2 and Detectron in `[INSTALL.md](INSTALL.md)`.
When installing cocoapi, please use [my fork](https://github.com/yihui-he/cocoapi) to get AP80 and AP90 scores.
### Testing
Inference without Var Voting (8 GPUs):
```
python2 tools/test_net.py -c configs/e2e_faster_rcnn_R-50-FPN_2x.yaml
```
You will get:
```
Average Precision (AP) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.385
Average Precision (AP) @[ IoU=0.50 | area= all | maxDets=100 ] = 0.578
Average Precision (AP) @[ IoU=0.75 | area= all | maxDets=100 ] = 0.412
Average Precision (AP) @[ IoU=0.50:0.95 | area= small | maxDets=100 ] = 0.209
Average Precision (AP) @[ IoU=0.50:0.95 | area=medium | maxDets=100 ] = 0.412
Average Precision (AP) @[ IoU=0.50:0.95 | area= large | maxDets=100 ] = 0.515
Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets= 1 ] = 0.323
Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets= 10 ] = 0.499
Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.522
Average Recall (AR) @[ IoU=0.50:0.95 | area= small | maxDets=100 ] = 0.321
Average Recall (AR) @[ IoU=0.50:0.95 | area=medium | maxDets=100 ] = 0.553
Average Recall (AR) @[ IoU=0.50:0.95 | area= large | maxDets=100 ] = 0.680
Average Precision (AP) @[ IoU=0.60 | area= all | maxDets=100 ] = 0.533
Average Precision (AP) @[ IoU=0.70 | area= all | maxDets=100 ] = 0.461
Average Precision (AP) @[ IoU=0.80 | area= all | maxDets=100 ] = 0.350
Average Precision (AP) @[ IoU=0.85 | area= all | maxDets=100 ] = 0.269
Average Precision (AP) @[ IoU=0.90 | area= all | maxDets=100 ] = 0.154
Average Precision (AP) @[ IoU=0.95 | area= all | maxDets=100 ] = 0.032
```
Inference with Var Voting:
```
python2 tools/test_net.py -c configs/e2e_faster_rcnn_R-50-FPN_2x.yaml STD_NMS True
```
You will get:
```
Average Precision (AP) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.392
Average Precision (AP) @[ IoU=0.50 | area= all | maxDets=100 ] = 0.576
Average Precision (AP) @[ IoU=0.75 | area= all | maxDets=100 ] = 0.425
Average Precision (AP) @[ IoU=0.50:0.95 | area= small | maxDets=100 ] = 0.212
Average Precision (AP) @[ IoU=0.50:0.95 | area=medium | maxDets=100 ] = 0.417
Average Precision (AP) @[ IoU=0.50:0.95 | area= large | maxDets=100 ] = 0.526
Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets= 1 ] = 0.324
Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets= 10 ] = 0.528
Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.564
Average Recall (AR) @[ IoU=0.50:0.95 | area= small | maxDets=100 ] = 0.346
Average Recall (AR) @[ IoU=0.50:0.95 | area=medium | maxDets=100 ] = 0.594
Average Recall (AR) @[ IoU=0.50:0.95 | area= large | maxDets=100 ] = 0.736
Average Precision (AP) @[ IoU=0.60 | area= all | maxDets=100 ] = 0.536
Average Precision (AP) @[ IoU=0.70 | area= all | maxDets=100 ] = 0.472
Average Precision (AP) @[ IoU=0.80 | area= all | maxDets=100 ] = 0.363
Average Precision (AP) @[ IoU=0.85 | area= all | maxDets=100 ] = 0.281
Average Precision (AP) @[ IoU=0.90 | area= all | maxDets=100 ] = 0.165
Average Precision (AP) @[ IoU=0.95 | area= all | maxDets=100 ] = 0.037
```
### Training
```
python2 tools/train_net.py -c configs/e2e_faster_rcnn_R-50-FPN_2x.yaml
```
### PyTorch re-implementations
[Stronger-yolo-pytorch](https://yihui-he.github.io/Stronger-yolo-pytorch/): yolov3 + KL-loss
### FAQ
Please create a [new issue](https://github.com/yihui-he/KL-Loss/issues/new).
---
[Detectron Readme](https://github.com/facebookresearch/Detectron)