https://github.com/gabyx/grsframework
Granular Rigid Body Simulation Framework: efficient research tools to simulate non-smooth granular rigid body dynamics.
https://github.com/gabyx/grsframework
avalanche dynamics-simulation granular mechanical-engineering mpi multibody-dynamics physics-engine physics-simulation rigid-bodies
Last synced: 10 months ago
JSON representation
Granular Rigid Body Simulation Framework: efficient research tools to simulate non-smooth granular rigid body dynamics.
- Host: GitHub
- URL: https://github.com/gabyx/grsframework
- Owner: gabyx
- License: gpl-3.0
- Created: 2016-03-20T20:43:17.000Z (over 10 years ago)
- Default Branch: master
- Last Pushed: 2025-02-24T12:57:31.000Z (over 1 year ago)
- Last Synced: 2025-05-15T13:44:03.603Z (about 1 year ago)
- Topics: avalanche, dynamics-simulation, granular, mechanical-engineering, mpi, multibody-dynamics, physics-engine, physics-simulation, rigid-bodies
- Language: C++
- Size: 393 MB
- Stars: 10
- Watchers: 4
- Forks: 0
- Open Issues: 1
-
Metadata Files:
- Readme: README.md
- License: LICENSE
Awesome Lists containing this project
README
# GRSFramework
**Granular Rigid Body Simulation Framework**: efficient research tools to simulate **non-smooth** granular rigid body dynamics.




[Homepage](http://gabyx.github.io/GRSFramework/)
[Wiki](https://github.com/gabyx/GRSFramework/wiki)
# Videos
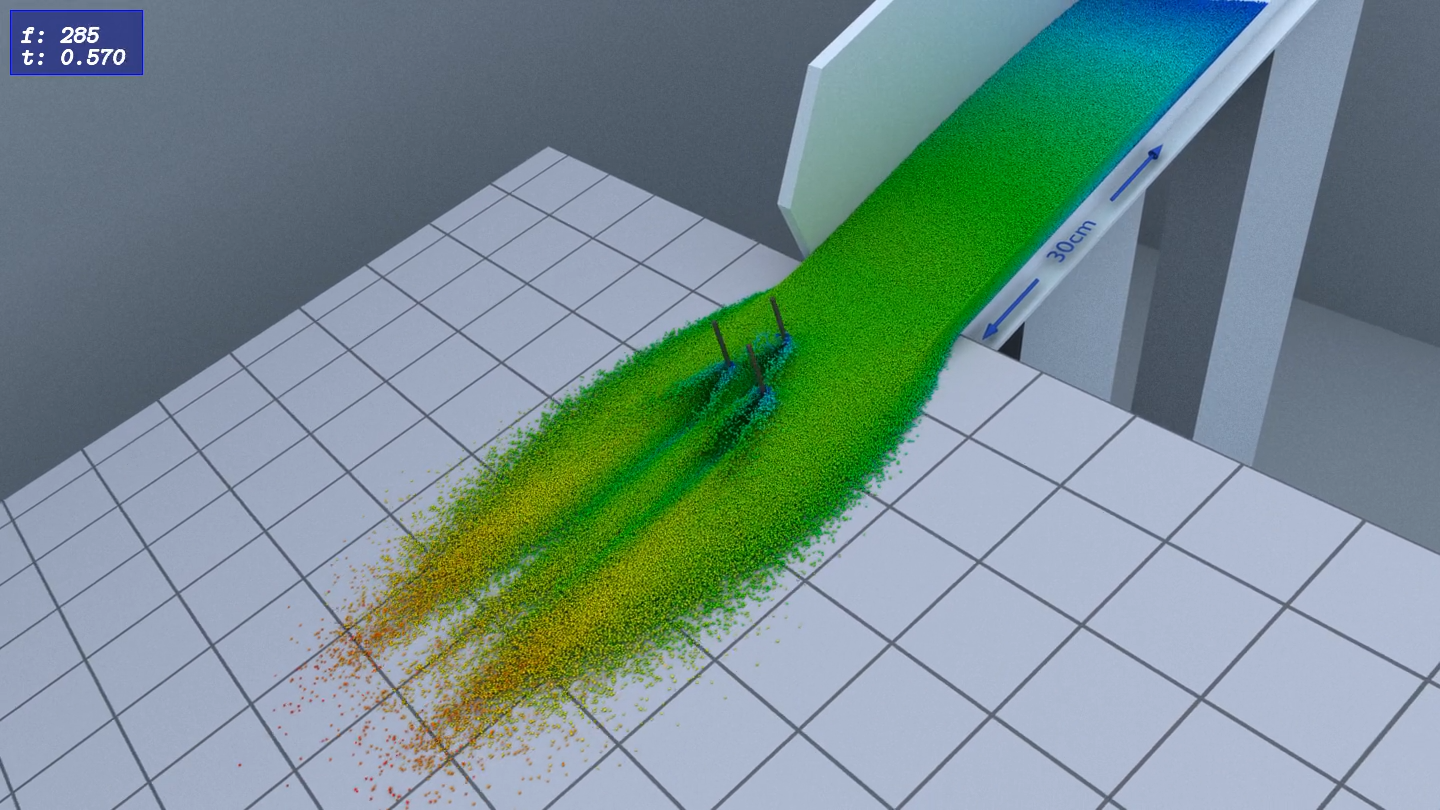
Coloring: Velocity
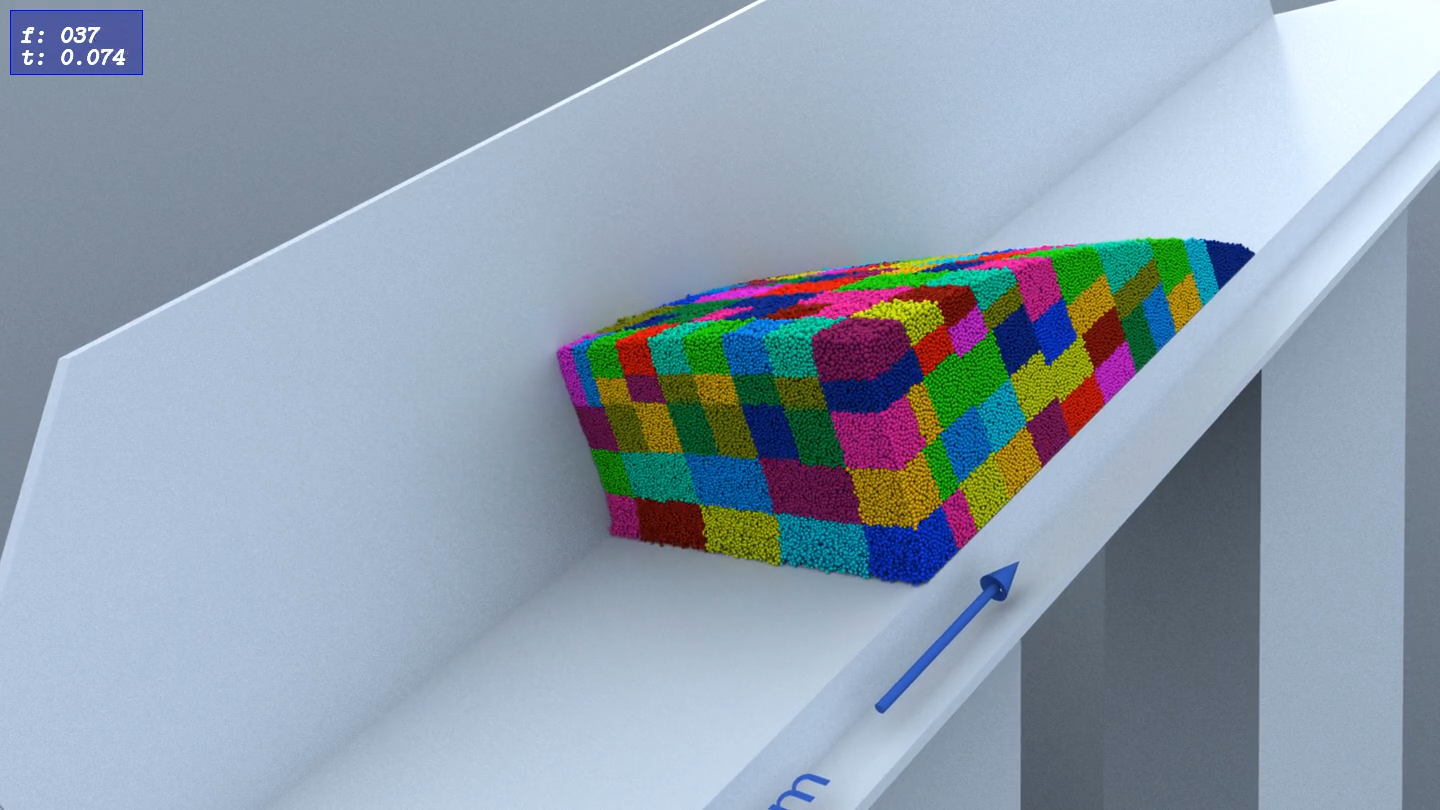
Coloring: Process Domain
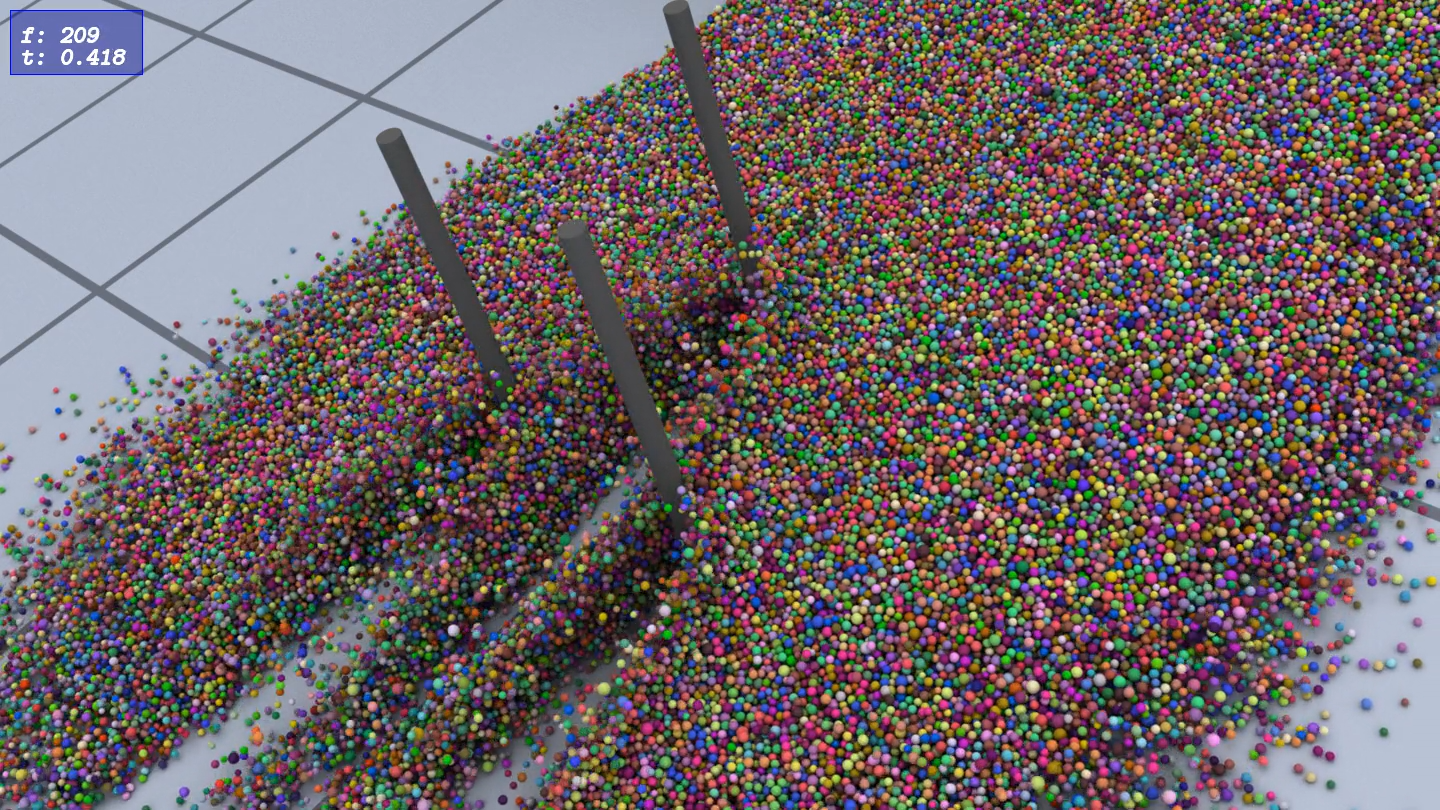
Coloring: Random
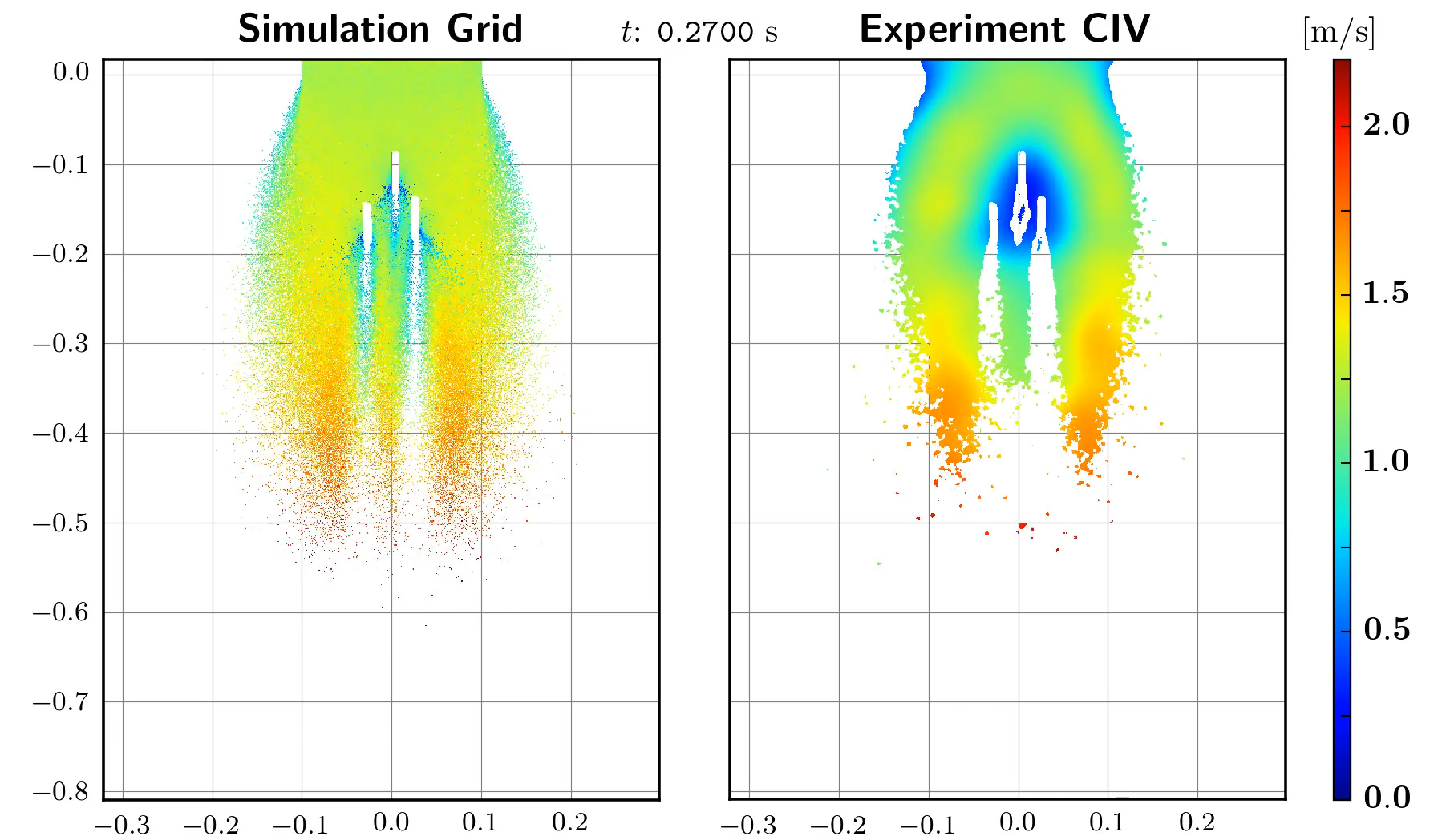
Coloring: Velocity
**Chute flow simulation & experiment with 1 million spheres:**
- _method:_ Moreau time-stepping with unilateral contacts and Coulomb friction
- computed on 384 cores with `GRSFSimMPI` in 12 h, rendered with `GRSFConverter` and `prman` in 24 h.
- _time step:_ 0.0002 s, _friction coefficient:_ 0.8
- _restitution coefficient:_ 0.0 (fully inelastic impacts)
- _global contact iterations:_ 1000