https://github.com/jakka351/can0swc
FG Steering Wheel Controls Adapter
https://github.com/jakka351/can0swc
can can0 falcon fg fg-falcon ford frames libsocketcan mcp2515 pi pican2 python python3 raspberry rpi socketcan swc throw-keypresses uinput vehicle
Last synced: over 1 year ago
JSON representation
FG Steering Wheel Controls Adapter
- Host: GitHub
- URL: https://github.com/jakka351/can0swc
- Owner: jakka351
- License: gpl-3.0
- Created: 2020-12-08T16:06:35.000Z (over 5 years ago)
- Default Branch: main
- Last Pushed: 2024-12-11T07:21:54.000Z (over 1 year ago)
- Last Synced: 2024-12-11T08:27:32.717Z (over 1 year ago)
- Topics: can, can0, falcon, fg, fg-falcon, ford, frames, libsocketcan, mcp2515, pi, pican2, python, python3, raspberry, rpi, socketcan, swc, throw-keypresses, uinput, vehicle
- Language: Python
- Homepage: https://testerpresent.com.au
- Size: 17.3 MB
- Stars: 14
- Watchers: 4
- Forks: 1
- Open Issues: 1
-
Metadata Files:
- Readme: README.md
- License: LICENSE
Awesome Lists containing this project
README


# [`can0swc`](https://github.com/jakka351/can0swc)


### `Steering Wheel Controls adaptor for mk1 FG`
Uses the python-can library to listen for pushes of steering wheel buttons, which are visible on the Falcon's mid-speed controller area network with CAN ID 0x2F2. Also listens for ICC button pushes on CAN ID 0x2FC and BEM functions on 0x307.
When a button is pushed, the script emulates a keypress on the Raspberry Pi. This is used here with [OpenDash's](https://github.com/opendsh/dash) implementation of Android Auto emulator [Openauto]() to control basic media functions. The Car used is an Ford FG mk1 Falcon. The factory display from the vehicle has been replaced with a Raspberry Pi 7 Inch Touchscreen.
### [Basic Breakdown of Steering Wheel Controls for FG Falcon](https://github.com/jakka351/FG-Falcon/wiki/Steering-Wheel-Media-Controls)
SWC are resistance based, all switches run on a single wire, pushing a button causes a specific resistance in the circuit. The Module sees a change in resistance, and accordingly sends data on to CAN-bus where it is recieved by the ACM/FDIM/ICC and acted upon.
-- [Relevant ICC Diagrams + Pinouts](https://github.com/jakka351/FG-Falcon/wiki/Interior-Command-Centre)

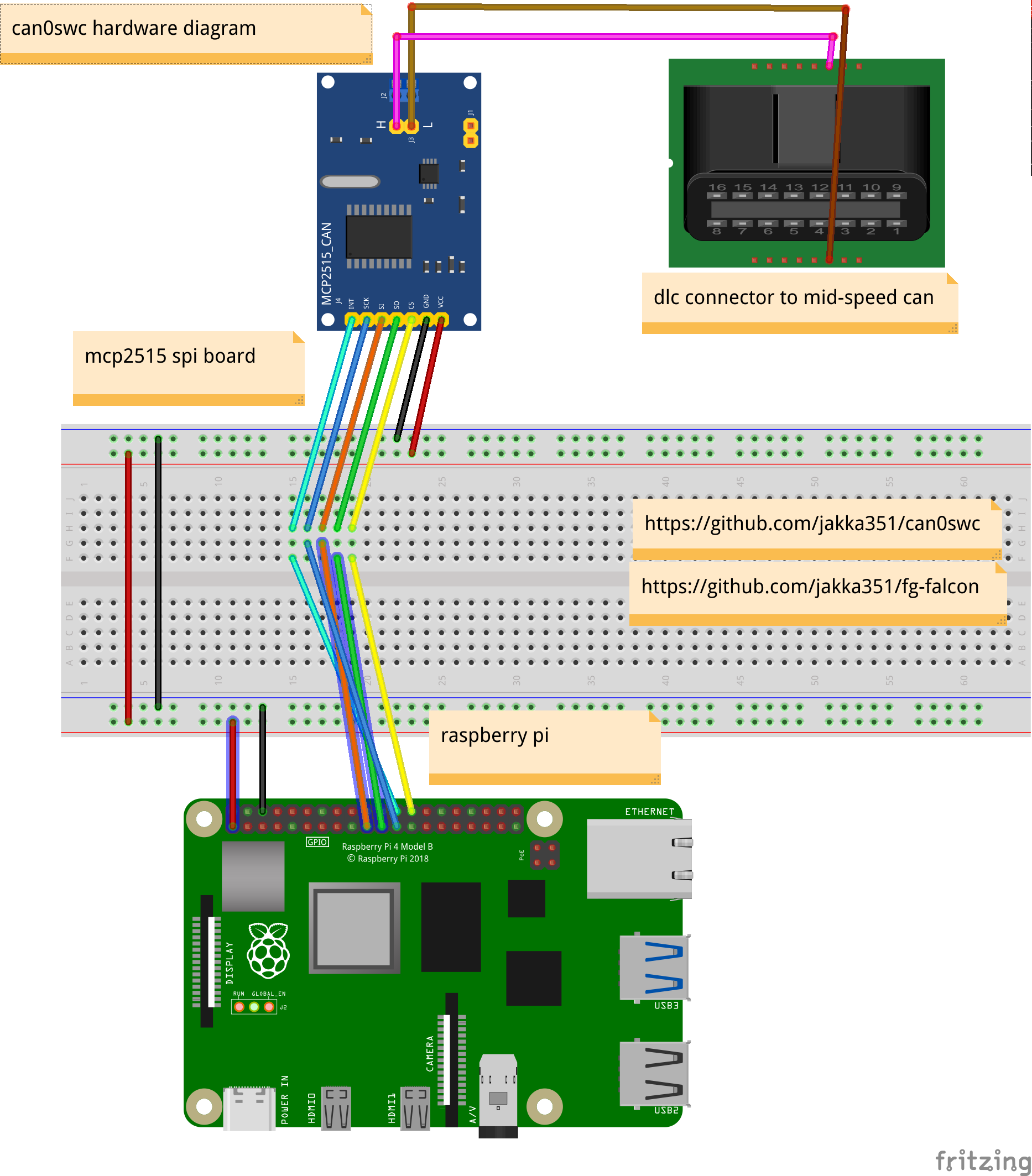
### Hardware
**Vehicle:** FG Falcon mk1
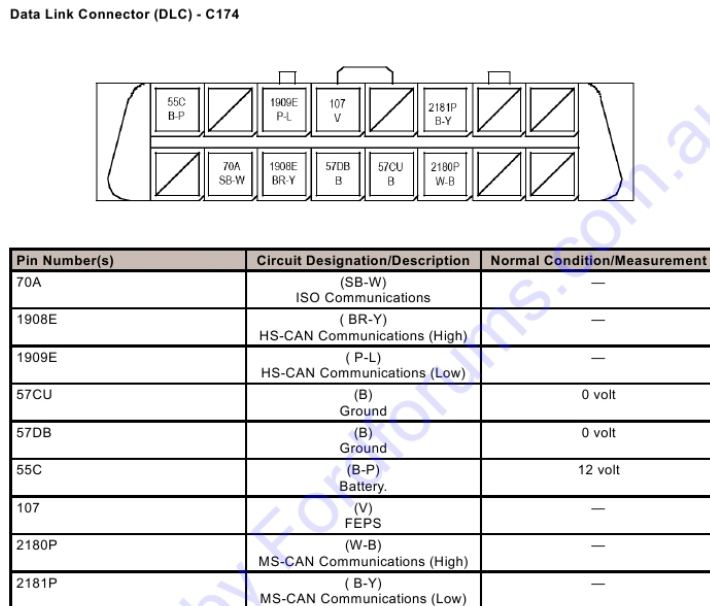
**Interface:** SocketCAN can0 interface, MCP2515 chipset, Midspeed-CAN@125kbps
**Software:** Can-Utils, Python-Can, Openauto, Opendash, Raspbian
**SBC:** Raspberry Pi 4B - 8gb, PiCan2 Hat, i2s audio hat
**Other:** Modified OBD-DB9 Cable, 7" Official Touchscreen, 2 Metre DSI Ribbon Cable, heatsink case, fans, enclosure, 12vdc-5vdc converter
#### Unit Diagram
#### Actual Unit

.jpg)

### Installation, Dependencies & Config
#### Edit
- edit "/etc/modules" to include
`uinput`
`can`
`can_dev`
`can_raw`
`vcan`
#### Set Up CAN interface
- Add the following to the 'config.txt' file in the /boot partition of the Raspberry Pi sd card.
```shell
dtoverlay=mcp2515-can0,oscillator=8000000,interrupt=25
```
- If using a PiCan Board set oscillator to 16000000
`oscillator=16000000`
- Add the following to '/etc/network/interfaces'
`auto can0 `
`iface can0 inet manual `
` pre-up /sbin/ip link set can0 type can bitrate 125000 triple-sampling on restart-ms 100 `
` up /sbin/ifconfig can0 up txqueuelen 65535 `
` down /sbin/ifconfig can0 down `
- Bring the can0 interface up
`sudo ip link set can0 type can bitrate 125000 triple-sampling on restart-ms 100 `
`sudo ifconfig can0 up txqueuelen 65535 `
#### Install
sudo apt update -y && sudo apt upgrade -y &&
sudo apt install -y can-utils libsocketcan2 libsocketcan-dev python-can python3-can &&
sudo apt install -y python3-uinput python3-evdev &&
sudo git clone https://github.com/jakka351/can0swc ./can0swc &&
cd ./can0swc &&
pip3 install -r requirements.txt &&
sudo modprobe uinput &&
sudo cp ./can0swc.service /lib/systemd/system/can0swc.service &&
sudo systemctl enable can0swc.service &&
sudo systemctl start can0swc.service &&
sudo systemctl status can0swc.service &&
sudo reboot
#### Testing with can-utils
- Test the script with socketcan virtual can interface, vcan0 and candump log files
`sudo modprobe vcan0`
`sudo ip link add dev vcan0 type vcan`
`sudo ifconfig vcan0 up txqueuelen 1000`
- Use canplayer to run the candump log
`canplayer -I ./candump.log -v vcan0=can0`
- If running cangen use '-L 8' to keep frames at 11bits or an error will occur
`cangen vcan0 -c -L 8 &`
- Candump logs available [here](https://github.com/jakka351/fg-falcon)
#### Run Script Manually
`cd ~/can0swc`
`sudo python3 ./can0swc.py`

### Wiring Diagrams


### CAN Data
| Address | Data | Function | Byte1 | Byte2 | Byte3 | Byte4 | Byte5 | Byte6 | Byte7 | Byte8 |
| ------- | ---- | -------- | ----- | ----- | ----- | ----- | ----- | ----- | ----- | ----- |
| `754` | 8 bytes | Volume Data | 0x00| x | x | x | x | x | x | x |
| `754` | 8 bytes | Seek | x | x | x | x | x | x | x | 0x08* |
| `754` | 8 bytes | Volume Up | x | x | x | x | x | x | x | 0x10* |
| `754` | 8 bytes | Volume Down | x| x | x | x | x | x | x | 0x18* |
| `754` | 8 bytes | Phone | x| x | x | x | x | x | 0x61** | x |
| `748` | 8 bytes | Mode | x| x | x | x | x | x | 0x10 | x |
*+1 depending on audio mode
**65 or 68 depending on audio mode

### Use in Different Vehicles
There is a templated version of the script that can be used to make your own version of can0swc, named as 'template.py'.

### Based upon:
-- [Python-CAN PiCAN2 Examples](https://github.com/jakka351/FG-Falcon/tree/master/resources/software/pythoncan)
-- [Webjocke canbus to keypress](https://github.com/webjocke/Python-CAN-bus-to-Keypresses)