https://github.com/kaiaai/lds
Arduino LiDAR library supporting YDLIDAR X2/X3/X4, RPLIDAR A1, Xiaomi LDS02RR, Neato XV11, LD14P, CAMSENSE X1, Delta-2A/2B/2G
https://github.com/kaiaai/lds
3irobotix arduino-library camsense ldrobot lds02rr lidar rplidar slamtec ydlidar
Last synced: over 1 year ago
JSON representation
Arduino LiDAR library supporting YDLIDAR X2/X3/X4, RPLIDAR A1, Xiaomi LDS02RR, Neato XV11, LD14P, CAMSENSE X1, Delta-2A/2B/2G
- Host: GitHub
- URL: https://github.com/kaiaai/lds
- Owner: kaiaai
- License: apache-2.0
- Created: 2024-01-15T00:22:43.000Z (over 2 years ago)
- Default Branch: main
- Last Pushed: 2025-03-11T11:53:01.000Z (over 1 year ago)
- Last Synced: 2025-03-30T03:09:11.822Z (over 1 year ago)
- Topics: 3irobotix, arduino-library, camsense, ldrobot, lds02rr, lidar, rplidar, slamtec, ydlidar
- Language: C++
- Homepage:
- Size: 219 KB
- Stars: 112
- Watchers: 4
- Forks: 11
- Open Issues: 2
-
Metadata Files:
- Readme: README.md
- License: LICENSE
Awesome Lists containing this project
README
# LiDAR Library for Arduino
Laser distance scan sensor (LIDAR) Arduino wrapper/controller for [kaia.ai](https://kaia.ai) home robot software platform.
Please check out the [Awesome 2D LiDARs list](https://github.com/kaiaai/awesome-2d-lidars)
and read this [blog post](https://kaia.ai/blog/arduino-lidar-library/) for more details.
Please visit the [Support Forum](https://github.com/makerspet/support/discussions/)!
This library supports:
- YDLIDAR X4, X4-PRO, X3, X3-PRO, X2/X2L, SCL models
- SLAMTEC RPLIDAR A1
- Neato XV11/Botvac
- Xiaomi Roborock Mi 1st gen LDS02RR
- 3irobotix Delta-2A, Delta-2B, Delta-2G, Delta-2A 115000 baud
- Note: there is a fixed pattern noise issue that needs debug
- LDROBOT LD14P
- CAMSENSE X1
Other models are in the works.

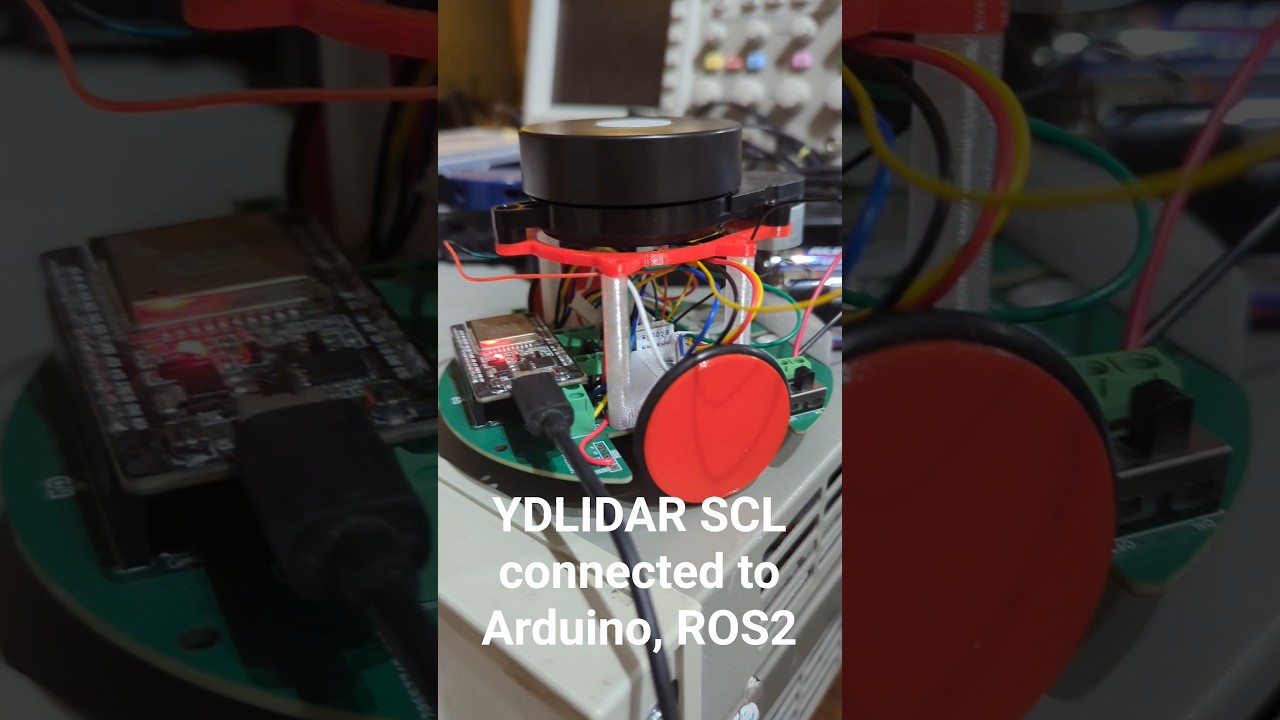
### Video: YDLIDAR SCL runs on Arduino, ROS2
### Video: Neato XV11 runs on Arduino, ROS2
### Video: Xiaomi Mi 1st gen LDS02RR runs on Arduino, ROS2

### Video: SLAMTEC RPLIDAR A1 runs on Arduino, ROS2

### Video: YDLIDAR X3 PRO runs on Arduino, ROS2
### Video: LDROBOT LD14P runs on Arduino, ROS2

### Video: CAMSENSE X1 runs on Arduino, ROS2

### Video: Delta-2G runs on Arduino, ROS2

## Example Code
Please see the `examples` folder for sample Arduino sketches.
## Connecting to Arduino
- Maker's Pet offers Lidar breakout boards for ESP32 for sale in its [onine store](https://makerspet.com/store/)
- follow [this DIY tutorial](https://kaia.ai/blog/tutorial-connect-ld14p-lidar/) to connect LDROBOT LD14P to Arduino ESP32
### Adapter Boards
Some LiDAR models do not have built-in motor control and therefore require an additional board to operate:
- for Xiaomi Roborock 1st gen LDS02RR use [this board](https://makerspet.com/store#!/Adapter-for-LDS02RR-LiDAR/p/697091363)
- for Neato XV11 use [this board](https://github.com/makerspet/pcb/tree/main/neato_delta_adapter)
- for 3irobotix Delta-2A, -2B, -2C PRO, -2D, -2G use [this board](https://github.com/makerspet/pcb/tree/main/neato_delta_adapter)
### ESP32 Module Variants
- When using the ESP32 WROVER board, it's worth using pins 32 and 33 instead of pins 16 and 17, which are used for QSPI
- ESP32-S3 has only two UARTs, as opposed to ESP32 having 3 UARTS
- When using the YD ESP32-S3, consider the default TX1, RX1 GPIO15 and GPIO16 pins and change the example code to `HardwareSerial LidarSerial(1);`
```
//ESP32-S3
//HardwareSerial LidarSerial(2);
HardwareSerial LidarSerial(1);
...
//LidarSerial.begin(baud_rate); // Use default GPIO TX 17, RX 16
LidarSerial.begin(baud_rate, SERIAL_8N1, 16, 15); // GPIO16 as RX1, GPIO15 as TX1
```
- ESP32-C3 has only two UARTs, as opposed to ESP32 having 3 UARTS
- use UART1 for LiDAR and, for example, GPIO4 as RX1 and GPIO5 as TX
```
//ESP32-C3
//HardwareSerial LidarSerial(2);
HardwareSerial LidarSerial(1);
...
//LidarSerial.begin(baud_rate); // Use default GPIO TX 17, RX 16
LidarSerial.begin(baud_rate, SERIAL_8N1, 4, 5); // GPIO4 as RX1, GPIO5 as TX1
```
## Release notes
## v0.6.3
- major bugfix: Delta, Delta-2G LiDARs decoding
## v0.6.2
- added CAMSENSE_X1 to all-lidars example
## v0.6.1
- added an all-in-one example sketch for all supported Lidar models
- pre-configured for LDS02RR
- bugfixed Espressif SDK 5.x (ESP32 Arduino 3.x) build
- examples cleanup
## v0.6.0
- support for Espressif SDK 5.x (ESP32 Arduino 3.x)
## v0.5.9
- added ESP32-C3 LD14P example
- added ESP32-S3 LD14P example
## v0.5.8
- LDROBOT LD14P commands
- start, stop motor
- set, get scan frequency
## v0.5.7
- added YDLIDAR X4-PRO
## v0.5.6
- added YDLIDAR SCL
## v0.5.5
- compilation bugfix
## v0.5.4
- added CAMSENSE X1
- example sketch fix
## v0.5.3
- added Delta-2A 230400 baud
- added Delta-2B
## v0.5.3
- Camsense X1
## v0.5.2
- added LDROBOT LD14P
## v0.5.1
- bugfix `lds_all_models.h` include file
## v0.5.0
- added Delta-2A, Delta-2G
## v0.4.0
- added Neato XV11
- added RPLIDAR A1
- added YDLIDAR X3, X3 PRO
- report scan RPM for all sensor models
### v0.3.1
- added YDLIDAR X2/X2L
- measure RPM for YDLIDAR X4, YDLIDAR X2/X2L
### v0.3.0
- virtual class methods
- ESP32 crash workaround by moving init code from constructor out to init()
### v0.2.0
- example bugfix
- renamed classes
### v0.1.0
- initial release
## TODO
- add Xiaomi Roborock LDS01RR
- add LDROBOT LD20
- add LDROBIT LD19P, https://github.com/Myzhar/ldrobot-lidar-ros2
- add Hitachi-LG HLS-LFCD2
- add Dreame TBD
- reduce raw data volume
- omit measurement quality since it usually does not get used
## Star History
[](https://star-history.com/#kaiaai/LDS&Date)