https://github.com/ldab/fenceless_robotic_lawnmower
No fence wires lawn mower with high precision GNSS, Long Range WiFi and GNSS Corrections over MQTT
https://github.com/ldab/fenceless_robotic_lawnmower
esp32 gnss iot lawnmower
Last synced: 10 months ago
JSON representation
No fence wires lawn mower with high precision GNSS, Long Range WiFi and GNSS Corrections over MQTT
- Host: GitHub
- URL: https://github.com/ldab/fenceless_robotic_lawnmower
- Owner: ldab
- License: mit
- Created: 2022-09-02T17:30:19.000Z (almost 4 years ago)
- Default Branch: main
- Last Pushed: 2022-10-08T15:56:57.000Z (over 3 years ago)
- Last Synced: 2024-12-29T15:06:40.066Z (over 1 year ago)
- Topics: esp32, gnss, iot, lawnmower
- Language: C
- Homepage:
- Size: 39.4 MB
- Stars: 5
- Watchers: 2
- Forks: 1
- Open Issues: 0
-
Metadata Files:
- Readme: README.md
- License: LICENSE
Awesome Lists containing this project
README
# fenceless-robotic-lawnmower
[](https://github.com/ldab/fenceless_robotic_lawnmower/releases/latest)

[](https://github.com/ldab/fenceless_robotic_lawnmower/blob/master/LICENSE)
[](https://github.com/ldab/fenceless_robotic_lawnmower)

## TODO
- [ ] Upload mower firmware over gateway webportal;
- [ ] Change gateway IP range so WiFi controller is accesible over the "home" network;
## Apps
* ~~Base~~ Now replaced by https://github.com/ldab/esp-gateway-long-range
* Mower
## Concept
### SPARTN and High Precision Position
```mermaid
flowchart LR
A(Point Perfect) -- SPARTN --> B(Thingstream Broker)
B <-- MQTT --> C(nora-w1)
C -- SPARTN --> D(ZED-F9P)
C -- keys --> D(ZED-F9P)
D -- Position --> C
```
## WiFi Remote Control

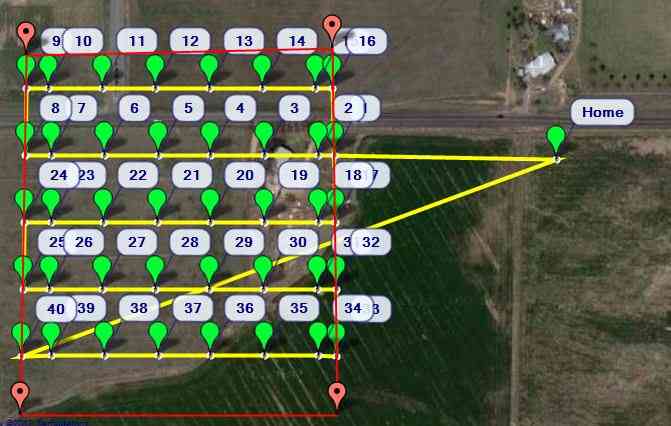
## Mission Planner
Use [Mission Planner](Mission Planner: https://ardupilot.org/planner/#) in order to rout the area to be covered:
File format is:
```
QGC WPL \r\n
\t\t\t\t\t\t\t\t\t\t\t\r\n
```
https://mavlink.io/en/file_formats/
## Hardware
### Wheel motor
#### Speed
Commercial units goes 16-18 m/min (), and has 205mm diameter $speed / (π * D) = ~RPM$ therefore we need something between 24 and 28 RPM.
#### Torque
You can go crazy about the numbers [Required Power and Torque](https://www.engineeringtoolbox.com/cars-power-torque-d_1784.html), but I go like this:
$$Fr = 15Kg * 9.81m/s2 * 0.2 (N)$$
$$a = 18 / 60 (m/s2)$$
$$Fa = 15kg * a (N)$$
$$Tr = Fr * 0.1m (Nm)$$
$$Ta = Fa * 0.1m (Nm)$$
$$Tt = Ta + Tr$$
We have 2x motors so `~7.5Nm` should be alright.
### Blade motor
Blade seems to run at 3500RPM
## Scrapbook:
* Board definition: https://github.com/platformio/platform-espressif32/blob/master/boards/esp32-s3-devkitc-1.json
* Circle distance between two points: https://en.wikipedia.org/wiki/Haversine_formula
## Credits:
* Mars Rover: https://github.com/jakkra/Mars-Rover
* Badges by [shields.io](https://shields.io/)