https://github.com/lemariva/upyimu
Camera stabilisation application!
https://github.com/lemariva/upyimu
example-code library micropython sensor
Last synced: over 1 year ago
JSON representation
Camera stabilisation application!
- Host: GitHub
- URL: https://github.com/lemariva/upyimu
- Owner: lemariva
- License: apache-2.0
- Created: 2018-06-12T22:16:11.000Z (about 8 years ago)
- Default Branch: master
- Last Pushed: 2019-01-14T19:38:54.000Z (over 7 years ago)
- Last Synced: 2025-03-27T08:45:19.615Z (over 1 year ago)
- Topics: example-code, library, micropython, sensor
- Language: Python
- Homepage: https://lemariva.com/blog/2018/06/micropython-camera-stabilisation-application
- Size: 932 KB
- Stars: 8
- Watchers: 4
- Forks: 2
- Open Issues: 0
-
Metadata Files:
- Readme: README.md
- License: LICENSE
Awesome Lists containing this project
README
# uPyIMU
This code allows you to stabilize a camera using:
* IMU6050/IMU9255
* WiPy 2.0/3.0 (or ESP32)
* Micro Servos 9g
* Camera Tripod
The code uses the `ahrs` library from Madgwick which fusions the data of the accelerometer, gyroscope (and magnetometer, only with MPU9255) and allows to calculate the rotation of the IMU in quaternion coordinates.
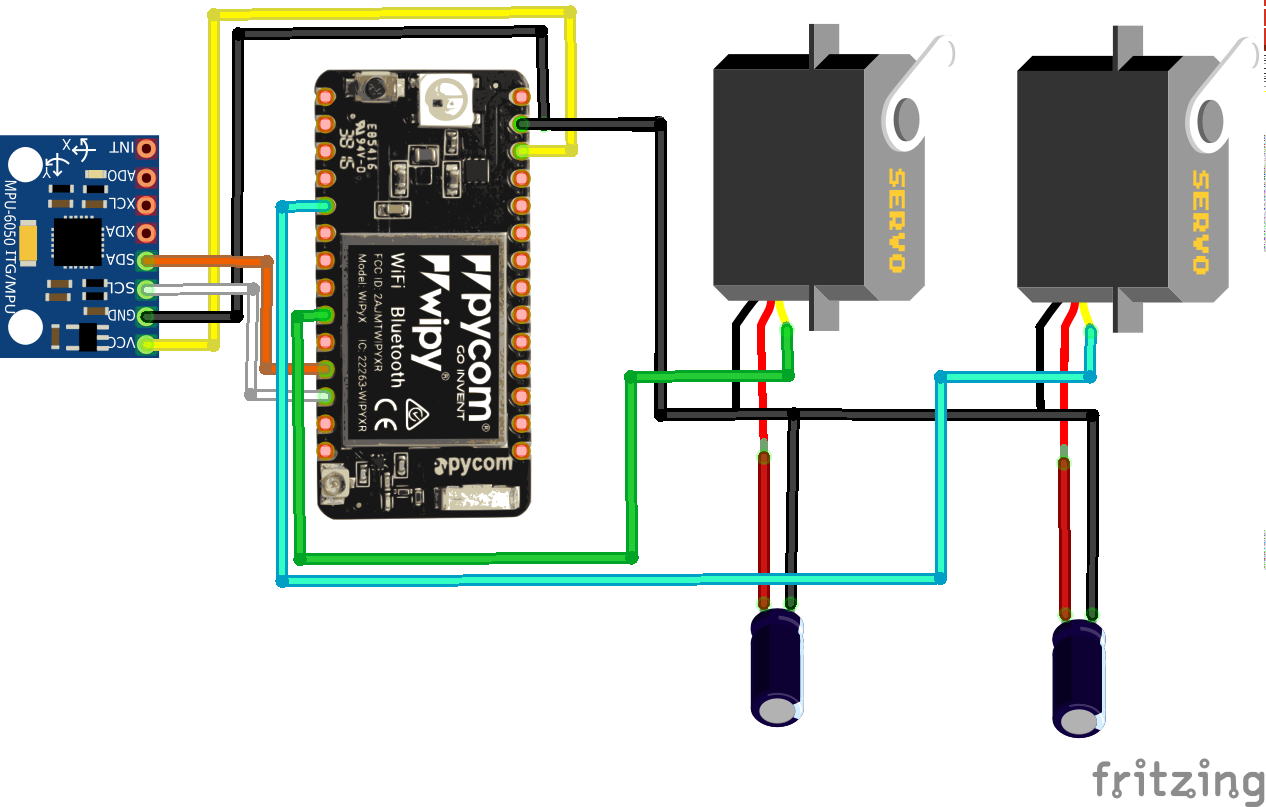
## Connections
| |
|:-:|
| |
|
|Fig. 1: WiPy, IMU6055 & MicroServos|
### Cable description
| | |
|:-:|:-:|
|**Signal/Cable**|**Color**|
|5V | Red|
|GND| Black|
|3.3V| Yellow|
The 3.3V (yellow) is supplied by the WiPy board. The WiPy board needs 5V (top right pin or over USB). If you use the USB from your computer to power your WiPy, this 5V cannot be used for the servos! You need an external power supply!
## Revision
* v0.1 - initial commit
## More information
* [MicroPython: Camera stabilisation application!](https://lemariva.com/blog/2018/06/micropython-camera-stabilisation-application)
## Licenses
* check the files