https://github.com/loki-silvres/two_dof_arm
Basic application of ROS1 to create a simple 2-DoF arm
https://github.com/loki-silvres/two_dof_arm
gazebo position-control python robotic-arm ros-noetic
Last synced: 2 months ago
JSON representation
Basic application of ROS1 to create a simple 2-DoF arm
- Host: GitHub
- URL: https://github.com/loki-silvres/two_dof_arm
- Owner: Loki-Silvres
- Created: 2024-05-19T17:05:28.000Z (about 2 years ago)
- Default Branch: main
- Last Pushed: 2024-07-18T21:49:08.000Z (almost 2 years ago)
- Last Synced: 2025-01-01T14:44:21.517Z (over 1 year ago)
- Topics: gazebo, position-control, python, robotic-arm, ros-noetic
- Language: CMake
- Homepage:
- Size: 4.14 MB
- Stars: 0
- Watchers: 1
- Forks: 0
- Open Issues: 0
-
Metadata Files:
- Readme: README.md
Awesome Lists containing this project
README
# Two_DoF_Arm
Basic application of ROS1 to create a simple 2-DoF arm
## Results
[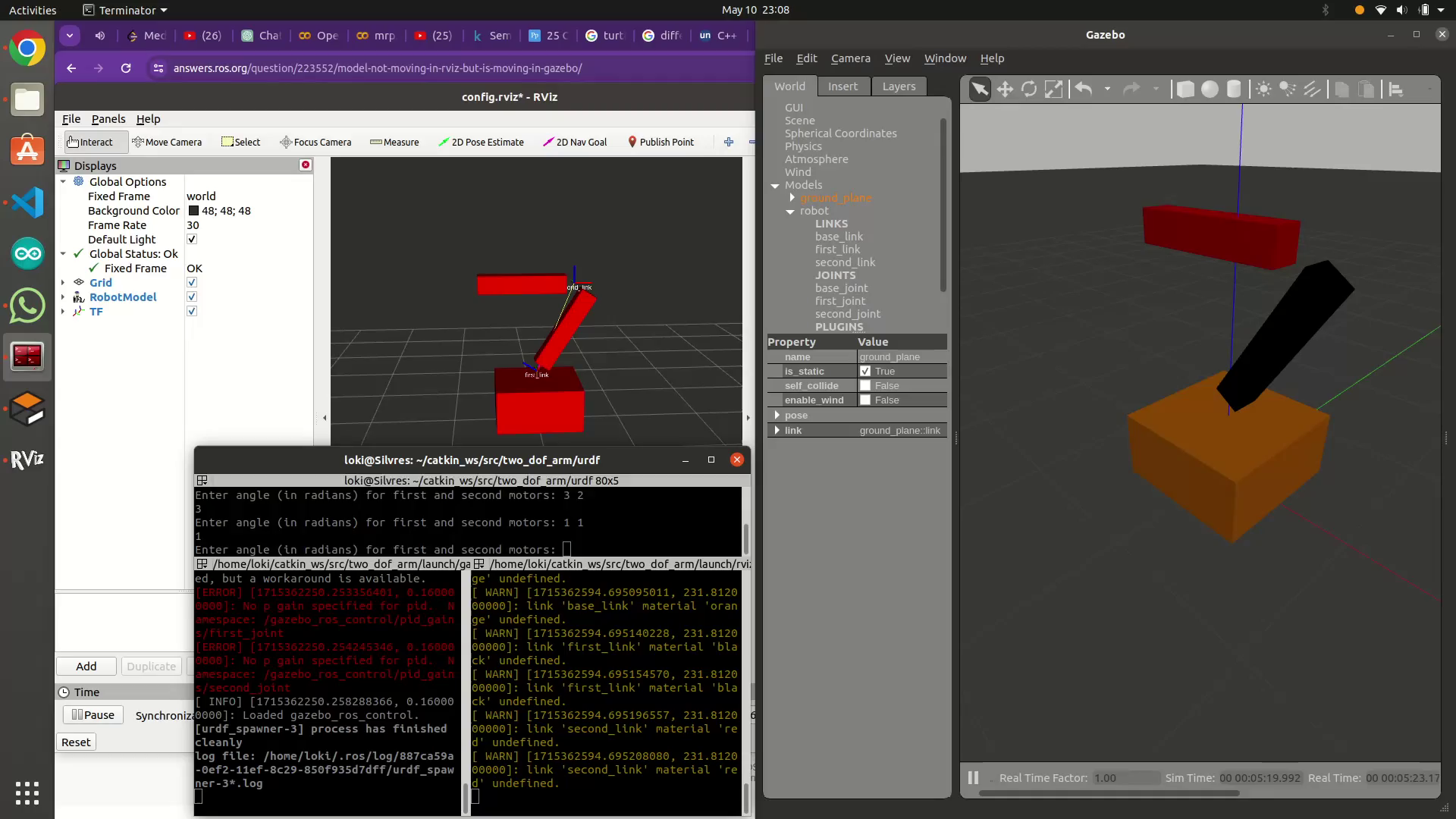](https://github.com/user-attachments/assets/a7ff4d74-b2d6-4f4a-82a9-fd1a138b7d23)