https://github.com/makerspet/makerspet_loki
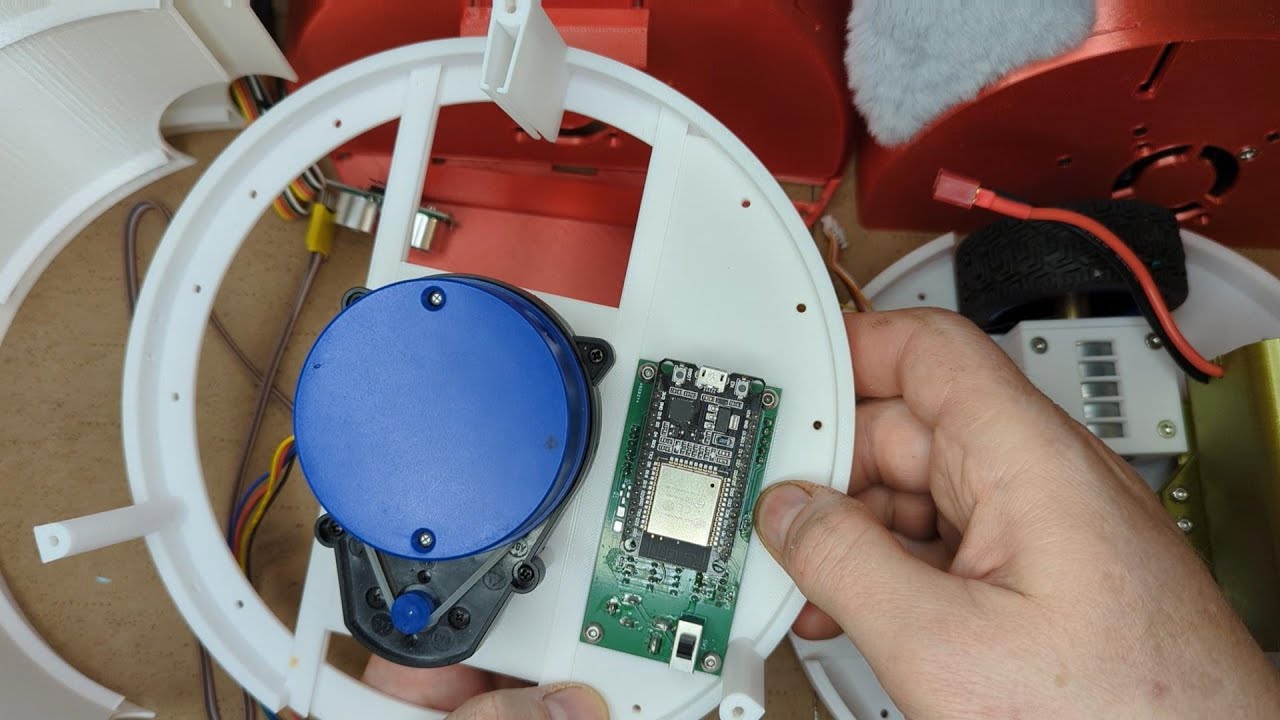
Maker's Pet Loki - a 200mm 3D-printed DIY pet robot compatible with Kaia.ai robotics software platform
https://github.com/makerspet/makerspet_loki
3d-printing 3mf arduino diy esp32 esp32-arduino fusion-360 kaia-ai kaiaai-robot makers open-source pet-robots pets remake-ai robot robotics ros2 stem stl-files
Last synced: over 1 year ago
JSON representation
Maker's Pet Loki - a 200mm 3D-printed DIY pet robot compatible with Kaia.ai robotics software platform
- Host: GitHub
- URL: https://github.com/makerspet/makerspet_loki
- Owner: makerspet
- License: apache-2.0
- Created: 2023-09-07T22:51:44.000Z (almost 3 years ago)
- Default Branch: iron
- Last Pushed: 2025-01-05T04:55:26.000Z (over 1 year ago)
- Last Synced: 2025-01-05T05:25:35.335Z (over 1 year ago)
- Topics: 3d-printing, 3mf, arduino, diy, esp32, esp32-arduino, fusion-360, kaia-ai, kaiaai-robot, makers, open-source, pet-robots, pets, remake-ai, robot, robotics, ros2, stem, stl-files
- Language: Lua
- Homepage: https://makerspet.com
- Size: 149 MB
- Stars: 36
- Watchers: 2
- Forks: 2
- Open Issues: 0
-
Metadata Files:
- Readme: README.md
- License: LICENSE
Awesome Lists containing this project
- awesome-robotics-projects - Maker's Pet - Extremely low-cost open-source 3D-printed Arduino/ROS2 home pet robot (Uncategorized / Uncategorized)
- awesome-weekly-robotics - Maker's Pet - a $100 open-source ROS2 home pet robot. This 3D-printed robot runs micro-ROS on Arduino ESP32 to cut down the cost and is compatible with $15 laser distance sensors from used Xiaomi 1st-gen robot vacuum cleaners. License: Apache 2.0. (Open Source Robots / Rovers and Cars)
README
# Maker's Pet Loki DIY home robot
A 200mm DIY 3D-printable pet robot compatible with [Kaia.ai](https://kaia.ai) software [platform](https://github.com/kaiaai/). 3D print, build, run and mod your own home pet robot! Please learn more at [Maker's Pet](https://makerspet.com), [REMAKE.AI](https://remake.ai) and join our [FB group](https://www.facebook.com/groups/243730868651472/).
Please visit the [Support Forum](https://github.com/makerspet/support/discussions/)!
Please install these Arduino libraries (using Arduino Library Manager) before building this firmware:
- [micro_ros_kaia](https://github.com/kaiaai/micro_ros_arduino_kaiaai)
- [LDS](https://github.com/kaiaai/LDS/)
- [PID_Timed](https://github.com/kaiaai/arduino_pid_timed)
- ESPAsyncWebSrv including AsyncTCP, ESPAsyncTCP
Supported laser distance scan sensors:
- YDLIDAR X4, X3, X3-PRO, X2/X2L
- Neato XV11
- LDS02RR from Xiaomi 1st gen vacuum cleaners (~$15 used off AliExpress including shipping)
- RPLIDAR A1

## Assembly instructions video

## PC, firmware setup instructions video

## Bring-up instructions video

## 3D printing instructions
## Arduino ESP32 breakout board setup instructions
## Features
- room mapping using a 360-degree laser distance sensor (ROS2-based).
- autonomous self-driving (ROS2-based).
- code your character, skills (work in progress)
- 3D-printable, 200mm round base
- Arduino ESP32 micro-controller
## Instructions
- 3D printing [STL](https://github.com/makerspet/3d_models/tree/main/loki_200mm/stl), [3MF](https://github.com/makerspet/3d_models/tree/main/loki_200mm/3mf)
- Arduino ESP32 [firmware](https://github.com/kaiaai/firmware)
- PC end user and developer [setup](https://github.com/kaiaai/docker)
- KiCad [schematic, PCB](https://github.com/makerspet/pcb)
- Software setup, configuration [instructions](https://www.youtube.com/playlist?list=PLOSXKDW70aR8SA16wTB0ou9ClKhv7micy)
- Fusion 360 3D CAD [design files](https://github.com/makerspet/3d_models/tree/main/loki_200mm/fusion360)
- ROS2 software mod [instructions](https://github.com/makerspet/makerspet_loki/tree/main/urdf)
## Open-source design
Authored in Fusion 360. Printed using a Prusa MK3.5S.
## Star History
[](https://star-history.com/#makerspet/makerspet_loki&Date)