Ecosyste.ms: Awesome
An open API service indexing awesome lists of open source software.
https://github.com/markjolah/tracker
Trajectory connection library for single particle tracking
https://github.com/markjolah/tracker
Last synced: 8 days ago
JSON representation
Trajectory connection library for single particle tracking
- Host: GitHub
- URL: https://github.com/markjolah/tracker
- Owner: markjolah
- License: apache-2.0
- Created: 2018-12-03T16:19:48.000Z (about 6 years ago)
- Default Branch: master
- Last Pushed: 2019-03-05T20:47:12.000Z (almost 6 years ago)
- Last Synced: 2024-03-19T18:26:17.811Z (10 months ago)
- Language: C++
- Homepage: https://markjolah.github.io/Tracker
- Size: 2.22 MB
- Stars: 1
- Watchers: 2
- Forks: 0
- Open Issues: 0
-
Metadata Files:
- Readme: README.md
- License: LICENSE
Awesome Lists containing this project
README

# Tracker
Tracker is a particle tracking trajectory connector tool that generates trajectories by tracking swarms of interacting particles through a sequence of video frames.
Tracker formulates optimal trajectory connection problems as instances of the [linear assignment problem (LAP)](https://en.wikipedia.org/wiki/Assignment_problem), and
uses the a sparse-matrix implementation of the [Jonker-Volgenant Algorithm](https://dl.acm.org/citation.cfm?id=30107) to solve the LAP problems.
* Tracker provides C++ and Matlab object-oriented interfaces. [`tracker::LAPTrack`](http://markolah.pecos.us/Tracker/classtracker_1_1LAPTrack.html)
* Tracker is designed for cross-platform compilation to Linux and Windows 64-bit targets.
## Trajectory connection problem
In single particle tracking applications, a set of likely particles are localized for each frame of a video capture. The goal of trajectory connection is to partition the localizations from all the frames into a set of trajectories. Each trajectory is a sequence of localizations which are likely to be from the same object (point emitter).
The Tracker library implements a two-phase strategy to trajectory connection. First a frame-to-frame algorithm sequentially builds a set of trajectories connecting localizations in adjacent frames, next a gap-closing phase connects shorter trajectories across several frames as particles are often not localized in every frame for various reasons including experimental and photo-chemical effects.
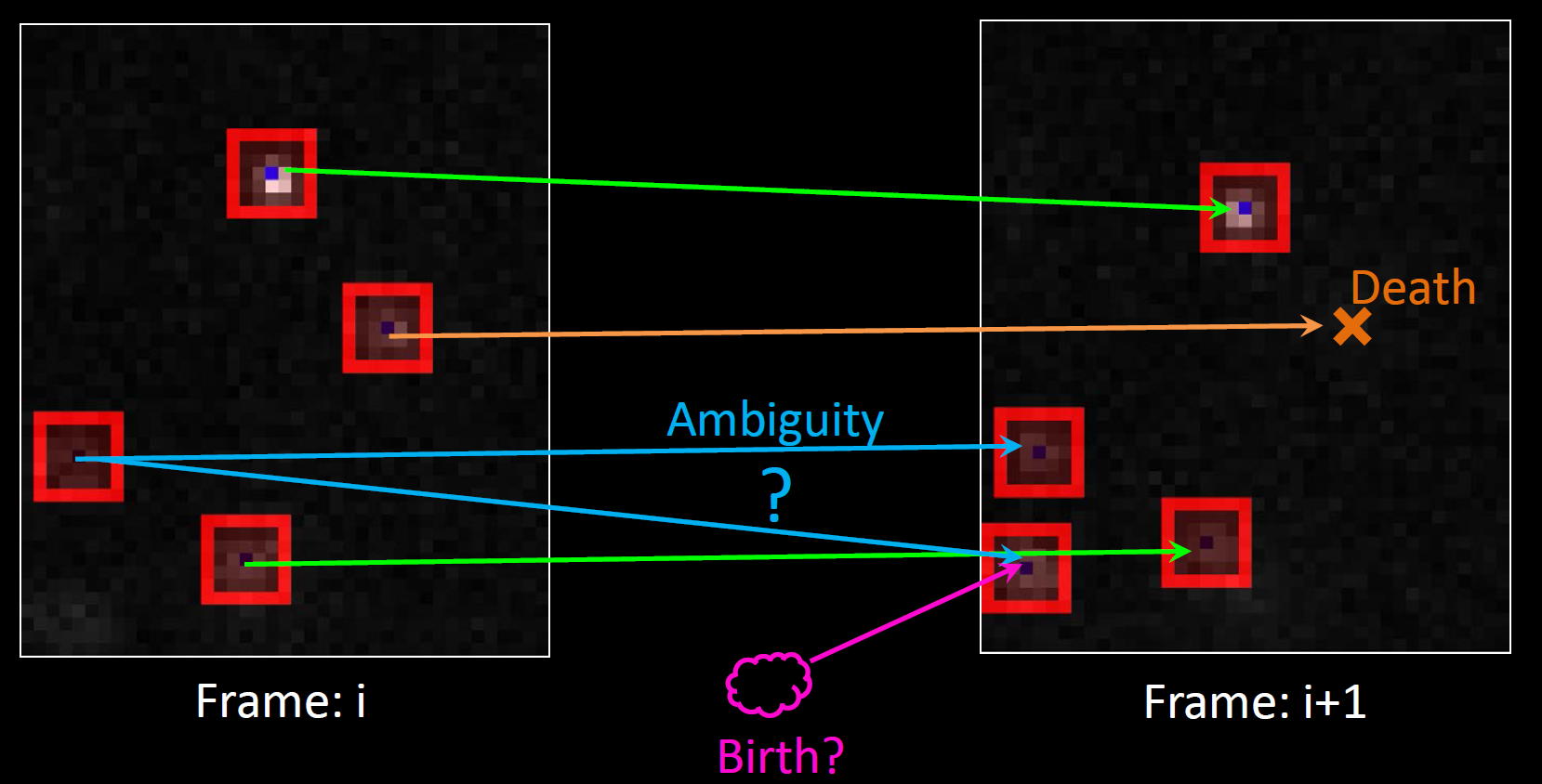
Figure 1: The frame-to-frame trajectory connection problem
## Documentation
The Tracker Doxygen documentation can be build with the `OPT_DOC` CMake option and is also available on online:
* [Tracker HTML Manual](https://markjolah.github.io/Tracker/index.html)
* [Tracker PDF Manual](https://markjolah.github.io/Tracker/pdf/Tracker-0.1-reference.pdf)
* [Tracker github repository](https://github.com/markjolah/Tracker)
## Installing
Tracker uses the CMake build system. The script [`build.sh`](https://github.com/markjolah/Tracker/blob/master/build.sh) sets the project-specific CMake options
to sensible values and builds the project under `./_build/Release` and installs it to the `./_install` prefix, which can be set with the `INSTALL_PREFIX` environment variable.
INSTALL_PREFIX="..." ./build.sh
Edit `build.sh` to customize or alternatively use the CMake gui directly:
cmake -B $BUILD_DIR -DCMAKE_INSTALL_PREFIX=$INSTALL_DIR
cmake-gui $BUILD_DIR
cmake --build $BUILD_DIR --target install
### Dependencies
* [*Armadillo*](http://arma.sourceforge.net/docs.html) - A high-performance array library for C++.
* [Ubuntu: [`libarmadillo-dev`](https://packages.ubuntu.com/search?keywords=libarmadillo-dev)] [Gentoo: [`sci-libs/armadillo`](https://packages.gentoo.org/packages/sci-libs/armadillo)]
#### External Projects
These packages are specialized CMake projects. If they are not installed on the development system, the [add_external_dependency()](https://github.com/markjolah/UncommonCMakeModules/blob/master/AddExternalDependency.cmake) function will automatically download, configure, build and install them to `CMAKE_INSTALL_PREFIX`.
- [BacktraceException](https://markjolah.github.io/BacktraceException) - A library to provide debugging output on exception calls. Important for Matlab debugging.
- [MexIFace](https://markjolah.github.io/MexIFace) - MexIFace provides an object-oriented C++/Matlab interface and provides cross-compilation support to build for Matlab target environments on Linux and Windows 64-bit targets.
### CMake options
The following CMake options control the build.
* `BUILD_SHARED_LIBS` - Build shared libraries
* `BUILD_STATIC_LIBS` - Build static libraries
* `BUILD_TESTING` - Build testing framework
* `OPT_DOC` - Build documentation
* `OPT_INSTALL_TESTING` - Install testing executables in install-tree.
* `OPT_EXPORT_BUILD_TREE` - Export the package from the build-tree and place in the [CMake user package registry](https://cmake.org/cmake/help/latest/manual/cmake-packages.7.html#user-package-registry).
* `OPT_MATLAB` - Enable matlab module building with MexIFace.
### Building for matlab
See:
## Using tracker
### Using Tracker in C++ applications
Tracker exports a [CMake config-file](https://cmake.org/cmake/help/latest/manual/cmake-packages.7.html#config-file-packages), allowing it to be found easily with CMake
build systtems
~~~.cmake
find_package(Tracker)
target_link_libraries(${MY_TARGET} Tracker::Tracker)
~~~
In the C++ source
~~~.cxx
#include
tracker::LAPTrack tracker(params);
~~~
### Using Tracker in Matlab applications
## LICENSE
* Copyright: 2013-2019
* Author: Mark J. Olah
* Email: ([email protected] DOT edu)
* LICENSE: Apache 2.0. See [LICENSE](https://github.com/markjolah/Tracker/blob/master/LICENSE) file.