https://github.com/mikolalysenko/l1-path-finder
🗺 Fast path planning for 2D grids
https://github.com/mikolalysenko/l1-path-finder
Last synced: about 1 year ago
JSON representation
🗺 Fast path planning for 2D grids
- Host: GitHub
- URL: https://github.com/mikolalysenko/l1-path-finder
- Owner: mikolalysenko
- License: mit
- Created: 2015-04-19T00:04:19.000Z (about 11 years ago)
- Default Branch: master
- Last Pushed: 2016-05-18T18:44:17.000Z (about 10 years ago)
- Last Synced: 2024-12-16T22:35:05.385Z (over 1 year ago)
- Language: JavaScript
- Homepage: https://mikolalysenko.github.io/l1-path-finder/www
- Size: 1.19 MB
- Stars: 488
- Watchers: 25
- Forks: 44
- Open Issues: 4
-
Metadata Files:
- Readme: README.md
- License: LICENSE
Awesome Lists containing this project
README
[ ](https://mikolalysenko.github.io/l1-path-finder/www)
](https://mikolalysenko.github.io/l1-path-finder/www)
[A fast path planner for grids.](https://mikolalysenko.github.io/l1-path-finder/www)
# Example
```javascript
var ndarray = require('ndarray')
var createPlanner = require('l1-path-finder')
//Create a maze as an ndarray
var maze = ndarray([
0, 1, 0, 0, 0, 0, 0,
0, 1, 0, 1, 0, 0, 0,
0, 1, 0, 1, 1, 1, 0,
0, 1, 0, 1, 0, 0, 0,
0, 1, 0, 1, 0, 0, 0,
0, 1, 0, 1, 0, 0, 0,
0, 1, 0, 1, 0, 1, 1,
0, 0, 0, 1, 0, 0, 0,
], [8, 7])
//Create path planner
var planner = createPlanner(maze)
//Find path
var path = []
var dist = planner.search(0,0, 7,6, path)
//Log output
console.log('path length=', dist)
console.log('path = ', path)
```
Output:
```
path length= 31
path = [ 0, 0, 7, 0, 7, 2, 0, 2, 0, 4, 1, 4, 1, 6, 3, 6, 5, 6, 5, 4, 7, 4, 7, 6 ]
```
# Install
This module works in any node-flavored CommonJS environment, including [node.js](https://nodejs.org/), [iojs](https://iojs.org/en/index.html) and [browserify](http://browserify.org/). You can install it using the [npm package manager](https://docs.npmjs.com/) with the following command:
```
npm i l1-path-finder
```
The input to the library is in the form of an [ndarray](https://github.com/scijs/ndarray). For more information on this data type, check out the [SciJS](https://scijs.net) project.
# API
```javascript
var createPlanner = require('l1-path-finder')
```
#### `var planner = createPlanner(grid)`
The default method from the package is a constructor which creates a path planner.
* `grid` is a 2D ndarray. `0` or `false`-y values correspond to empty cells and non-zero or `true`-thy values correspond to impassable obstacles
**Returns** A new planner object which you can use to answer queries about the path.
**Time Complexity** `O(grid.shape[0]*grid.shape[1] + n log(n))` where `n` is the number of concave corners in the grid.
**Space Complexity** `O(n sqrt(log(n)))`
#### `var dist = planner.search(srcX, srcY, dstX, dstY[, path])`
Executes a path search on the grid.
* `srcX, srcY` are the coordinates of the start of the path (source)
* `dstX, dstY` are the coordiantes of the end of the path (target)
* `path` is an optional array which receives the result of the path
**Returns** The distance from the source to the target
**Time Complexity** Worst case `O(n sqrt(log(n)³) )`, but in practice much less usually
# Benchmarks
l1-path-finder is probably the fastest JavaScript library for finding paths on
uniform cost grids. Here is a chart showing some typical comparisons (log-scale):
[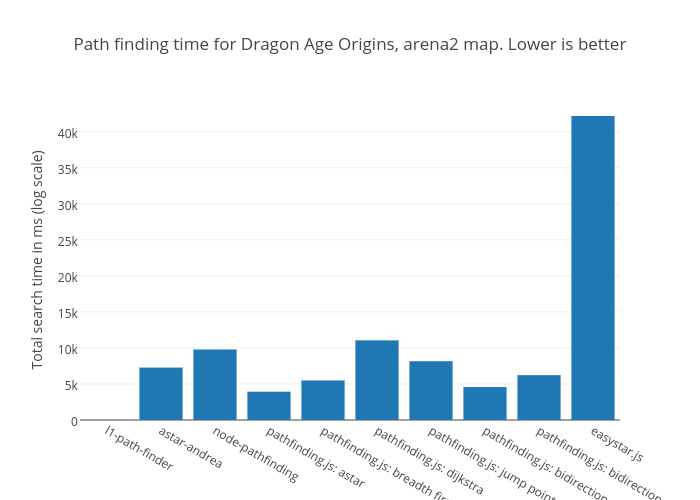 ](https://plot.ly/~MikolaLysenko/221)
](https://plot.ly/~MikolaLysenko/221)
You can try out some of the benchmarks in [your browser here](http://mikolalysenko.github.io/l1-path-finder/benchmark.html), or you can run them locally by cloning this repo. Data is taken from the [grid path planning challenge benchmark](http://www.movingai.com/benchmarks/).
It is also pretty competitive with C++ libraries for path searching. The following chart shows the performance of l1-path-finder compared to [Warthog](https://code.google.com/p/ddh/), which is a state of the art
implementation of the popular "[jump point search](https://harablog.wordpress.com/2011/09/07/jump-point-search/)" algorithm:
[ ](https://plot.ly/~MikolaLysenko/230)
](https://plot.ly/~MikolaLysenko/230)
# Notes and references
* The algorithm implemented in this module is based on the following result by Clarkson et al:
+ K. Clarkson, S. Kapoor, P. Vaidya. (1987) "[Rectilinear shortest paths through polygonal obstacles in O(n log(n)²) time](http://dl.acm.org/citation.cfm?id=41985)" SoCG 87
* This data structure is asymptotically faster than naive grid based algorithms like Jump Point Search or simple A*/Dijkstra based searches.
* All memory is preallocated. At run time, searches trigger no garbage collection or other memory allocations.
* The heap data structure used in this implementation is a pairing heap based on the following paper:
+ G. Navarro, R. Paredes. (2010) "[On sorting, heaps, and minimum spanning trees](http://citeseerx.ist.psu.edu/viewdoc/summary?doi=10.1.1.218.3241)" Algorithmica
* Box stabbing queries are implemented using rank queries.
* The graph search uses landmarks to speed up A*, based on the technique in the following paper:
+ A. Goldberg, C. Harrelson. (2004) "[Computing the shortest path: A* search meets graph theory](http://research.microsoft.com/pubs/64511/tr-2004-24.pdf)" Microsoft Research Tech Report
* For more information on A* searching, check out [Amit Patel's pages](http://theory.stanford.edu/~amitp/GameProgramming/)
# License
(c) 2015 Mikola Lysenko. MIT License