https://github.com/moveit/moveit_task_constructor
A hierarchical multi-stage manipulation planner
https://github.com/moveit/moveit_task_constructor
Last synced: about 1 year ago
JSON representation
A hierarchical multi-stage manipulation planner
- Host: GitHub
- URL: https://github.com/moveit/moveit_task_constructor
- Owner: moveit
- License: bsd-3-clause
- Created: 2017-03-12T15:47:58.000Z (about 9 years ago)
- Default Branch: master
- Last Pushed: 2025-05-02T08:49:13.000Z (about 1 year ago)
- Last Synced: 2025-05-02T09:48:53.585Z (about 1 year ago)
- Language: C++
- Homepage: https://moveit.github.io/moveit_task_constructor
- Size: 3.08 MB
- Stars: 208
- Watchers: 32
- Forks: 163
- Open Issues: 114
-
Metadata Files:
- Readme: README.md
- License: LICENSE.txt
Awesome Lists containing this project
- awesome-ros-deliberation - MoveIt Task Constructor - MoveIt add-on package that performs skeleton-based task and motion planning. (Packages)
README
# MoveIt Task Constructor Framework
The Task Constructor framework provides a flexible and transparent way to define and plan actions that consist of multiple interdependent subtasks.
It draws on the planning capabilities of [MoveIt](https://moveit.ros.org/) to solve individual subproblems in black-box *planning stages*.
A common interface, based on MoveIt's PlanningScene is used to pass solution hypotheses between stages.
The framework enables the hierarchical organization of basic stages using *containers*, allowing for sequential as well as parallel compositions.
## Branches
This repository provides the following branches:
- **master**: ROS 1 development
- **ros2**: ROS 2 development, compatible with MoveIt 2 `main`
- **humble**: ROS 2 stable branch for Humble support
## Videos
- Demo video associated with [ICRA 2019 paper](https://pub.uni-bielefeld.de/download/2918864/2933599/paper.pdf)
[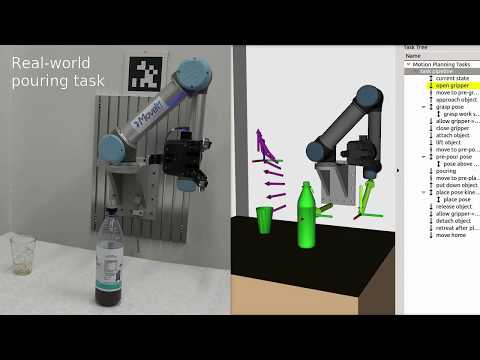](https://www.youtube.com/watch?v=fCORKVYsdDI)
- [Presentation @ ROSCon 2018 (Madrid)](https://vimeo.com/293432325)
- [Presentation @ MoveIt workshop 2019 (Macau)](https://www.youtube.com/watch?v=a8r7O2bs1Mc)
## Tutorial
We provide a tutorial for a pick-and-place pipeline without bells & whistles [as part of the MoveIt tutorials](https://moveit.github.io/moveit_tutorials/doc/moveit_task_constructor/moveit_task_constructor_tutorial.html).
## Roadmap
**Feedback, reports and contributions are very welcome.**
The current roadmap is to replace MoveIt's old pick&place pipeline and provide a *transparent mechanism* to enable and debug complex motion sequences.
Further planned features include
- Entwined planning and execution for early execution, monitoring and code hooks
- Subsolution blending
- Parallel planning
- Iterative solution improvement
Ideas and requests for other interesting/useful features are welcome.
## Citation
If you use this framework in your project, please cite the associated paper:
Michael Görner*, Robert Haschke*, Helge Ritter, and Jianwei Zhang,
"MoveIt! Task Constructor for Task-Level Motion Planning",
_International Conference on Robotics and Automation (ICRA)_, 2019, Montreal, Canada.
[[DOI]](https://doi.org/10.1109/ICRA.2019.8793898) [[PDF]](https://pub.uni-bielefeld.de/download/2918864/2933599/paper.pdf).
```plain
@inproceedings{goerner2019mtc,
title={{MoveIt! Task Constructor for Task-Level Motion Planning}},
author={Görner, Michael* and Haschke, Robert* and Ritter, Helge and Zhang, Jianwei},
booktitle={IEEE International Conference on Robotics and Automation (ICRA)},
year={2019}
}
```