https://github.com/parker-int64/yolov5-RGBD
Qt QML based yolov5 + RGBD camera program
https://github.com/parker-int64/yolov5-RGBD
cuda cudnn depth opencv openvino qml-applications qt rgbd tensorrt yolov5
Last synced: 8 months ago
JSON representation
Qt QML based yolov5 + RGBD camera program
- Host: GitHub
- URL: https://github.com/parker-int64/yolov5-RGBD
- Owner: parker-int64
- Created: 2022-07-29T01:21:59.000Z (over 3 years ago)
- Default Branch: main
- Last Pushed: 2022-07-29T02:31:25.000Z (over 3 years ago)
- Last Synced: 2024-11-09T18:41:55.143Z (about 1 year ago)
- Topics: cuda, cudnn, depth, opencv, openvino, qml-applications, qt, rgbd, tensorrt, yolov5
- Language: C++
- Homepage:
- Size: 284 KB
- Stars: 19
- Watchers: 2
- Forks: 3
- Open Issues: 0
-
Metadata Files:
- Readme: README.md
Awesome Lists containing this project
- awesome-yolo-object-detection - parker-int64/yolov5-RGBD - int64/yolov5-RGBD?style=social"/> : Qt QML based yolov5 + RGBD camera program. (Object Detection Applications)
README
# Yolo RGBD Demo program
---
**项目仅做参考,部分功能未完成**
If I’d had more time, I could have finished it.
文件目录说明
```
YoloRGBD
├─assets ------ 资源目录,存放图片,字体文件等
├─bin ------ 默认可执行文件生成目录
│ └─conf ------ conf文件用于存放Debug生成的json文件
├─iconwin ------ windows下icon的源文件,文件下app.rc是编译所需文件
├─include ------ 头文件目录
├─qml ------ qml界面文件目录
├─script ------ 脚本文件目录,`nvidia_gpu_info.ps1`用于获取Nvidia GPU使用率
├─src ------ 源文件目录
├─video ------ 测试用视频文件目录
├─weights ------ 存放yolox (Intel OpenVino), yolov5 Engine(yolov5 Nvidia tensrorRT) 的网络模型文件
├─qtquickcontrols2.conf ----- qml主题文件
└─qml.qrc ------ qml的资源文件,里面存放了`.qml`文件路径信息, 资源文件路径信息,qml主题文件路径信息,是编译所需的源文件
```
## 编译方式
---
建议采用Qt Creator,(CMake)构建系统构建。
环境说明:
||||
|----|----|----|
|类别|版本|备注|
|OS|Windows 10 20H2|CPU: Intel i5/i7 六代以上, GPU: Nvidia GTX 1060|
|Qt|5.15.2(MSVC 2019)|Qt Creator 7.0.0|
|OpenCV|4.x|3.x到4.x需更改部分代码(将`bin`添加至环境变量中)|
|OpenVino|2021.4.1(2022.1.0也测试可行)|需要自行复制`tbb.dll/tbb_debug.dll`到可执行文件目录(或者将其添加至环境变量中)|
|Nvidia CUDA|10.3|将`bin`添加至环境变量中|
|Nvidia cuDNN|8.x|将`bin`添加至环境变量中|
|Nvidia TensorRT|8.x|将`bin`添加至环境变量中|
|OpenNI2|/|需拷贝OpenNI Lib下所有文件到可执行文件目录|
**OpenVino 仅支持Intel CPU/GPU以及部分Arm设备**,详情参见[Support lists](https://docs.openvino.ai/latest/openvino_docs_OV_UG_Working_with_devices.html),如需编译请访问[Get Started](https://docs.openvino.ai/latest/get_started.html)下载所需套件。
**Nvidia CUDA/cuDNN/TensorRT 仅支持Nvidia自家GPU**,如需编译请访问[Nvidia Developer](https://developer.nvidia.com/)下载所需套件。
# 运行截图
+ Home page
+ Detect page
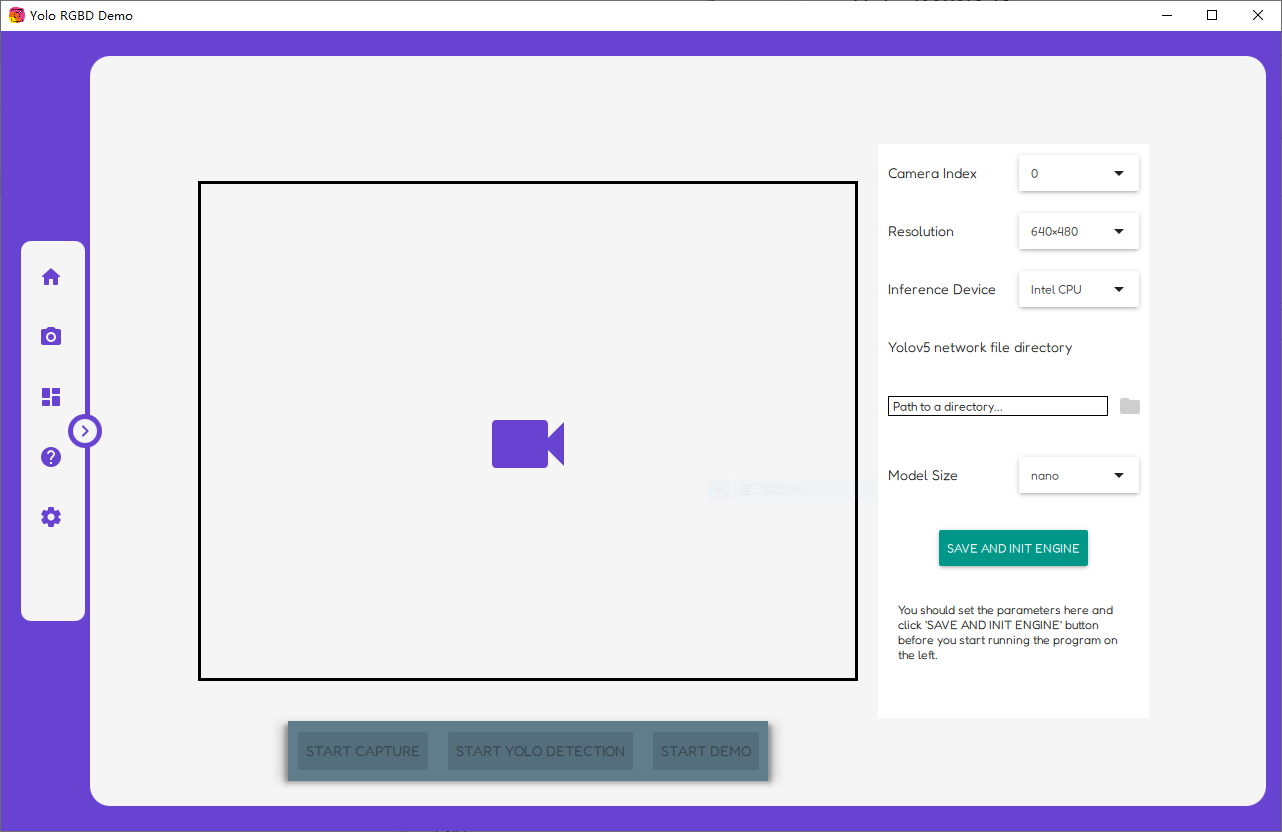
# 运行方式
按照正确的顺序选择摄像头序列,像素大小,推理后端类别和模型大小,先点击`Save and Init Engine`初始化引擎,然后可以点击左边的`Start Capture`和`Start Yolo Detection`