Ecosyste.ms: Awesome
An open API service indexing awesome lists of open source software.
https://github.com/pollen-robotics/reachy_moveit_config_ros2
Moveit2 configuration package for Reachy
https://github.com/pollen-robotics/reachy_moveit_config_ros2
Last synced: about 1 month ago
JSON representation
Moveit2 configuration package for Reachy
- Host: GitHub
- URL: https://github.com/pollen-robotics/reachy_moveit_config_ros2
- Owner: pollen-robotics
- License: apache-2.0
- Created: 2021-09-13T08:53:54.000Z (over 3 years ago)
- Default Branch: main
- Last Pushed: 2021-09-13T10:54:40.000Z (over 3 years ago)
- Last Synced: 2024-11-06T08:12:37.738Z (3 months ago)
- Language: Python
- Size: 333 KB
- Stars: 2
- Watchers: 4
- Forks: 0
- Open Issues: 0
-
Metadata Files:
- Readme: README.md
- License: LICENSE
Awesome Lists containing this project
README
# Reachy MoveIt config
Integration of the Reachy robot in MoveIt2 for ROS 2
## Getting started
### Install
1. Install [ROS2 Foxy](https://docs.ros.org/en/foxy/Installation.html) on top of [Ubuntu 20.04](https://ubuntu.com/download/desktop)
2. Install [MoveIt2](http://moveit2_tutorials.picknik.ai/doc/getting_started/getting_started.html#)
3. Configure [your ROS2 environment](https://docs.ros.org/en/foxy/Tutorials/Configuring-ROS2-Environment.html) so that you can sucessfully compile your ROS workspace (e.g. `~/ros2_ws`) with `colcon build` command
4. `cd ~/ros2_ws/src && git clone https://github.com/pollen-robotics/reachy_moveit_config_ros2`
5. `cd ~/ros2_ws/src && git clone https://github.com/pollen-robotics/reachy_description_ros2`
6. `cd ~/ros2_ws && colcon build --symlink-install`
7. `source ~/ros2_ws/install/setup.bash`
### Use
Just launch the regular MoveIt2 demo launch file:
```
ros2 launch reachy_moveit_config_ros2 demo.launch.py
```
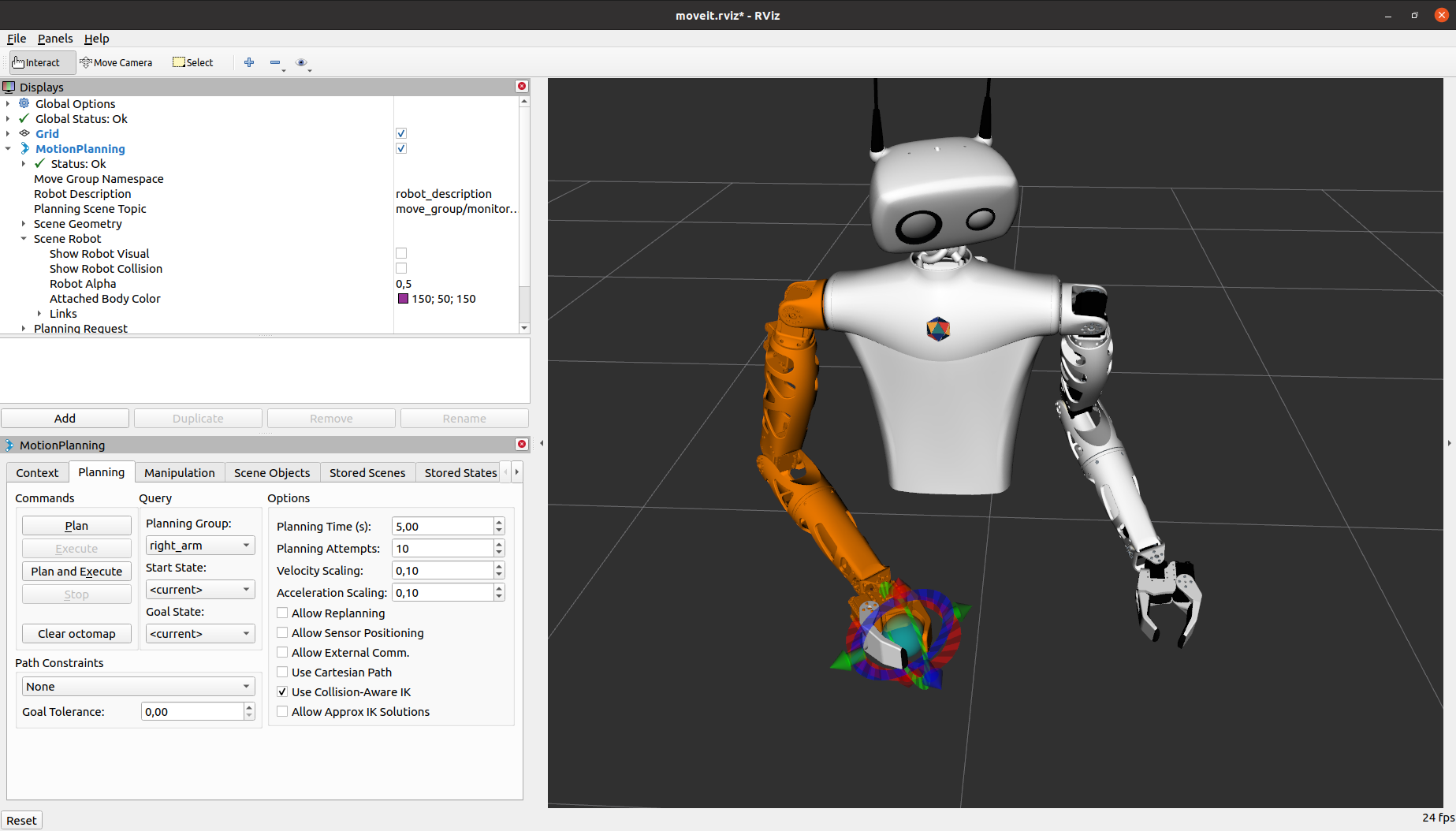
Then pickup a group in the **Query Planning Group** from the **Motion Planning** panel (right arm, left arm or head) and move the blue ball appearing at the tip of the end effector to some goal pose. Then click **Plan and Execute** to plan a trajectory with obstacle avoidance and run it with fake trajectory controllers.