https://github.com/robocorp/example-orders-distribution
RobotSpareBin 3-Step Process for distributing orders by robot part type.
https://github.com/robocorp/example-orders-distribution
csv desktop pdf tables workitems
Last synced: 4 months ago
JSON representation
RobotSpareBin 3-Step Process for distributing orders by robot part type.
- Host: GitHub
- URL: https://github.com/robocorp/example-orders-distribution
- Owner: robocorp
- License: apache-2.0
- Created: 2022-09-22T13:14:51.000Z (almost 4 years ago)
- Default Branch: master
- Last Pushed: 2023-10-26T13:59:56.000Z (over 2 years ago)
- Last Synced: 2025-01-09T09:26:40.370Z (over 1 year ago)
- Topics: csv, desktop, pdf, tables, workitems
- Language: RobotFramework
- Homepage:
- Size: 146 KB
- Stars: 1
- Watchers: 15
- Forks: 0
- Open Issues: 0
-
Metadata Files:
- Readme: README.md
- License: LICENSE
Awesome Lists containing this project
README
# Order in bulk the total number of requested robot parts
This is a 3-Step Process which takes a list of orders and computes the total number of
heads, bodies and legs that we have to order.
This is a funny practical approach of the
[SplitCombine](https://github.com/robocorp/example-workitems-splitcombine) pattern:
- Problem: Having to process multiple input Work Items before being able to create just
one output Work Item with the final result at the end of the iteration.
- Solution: Creating an empty output Work Item attached to the initial input one, then
saving later on the final result data into it.
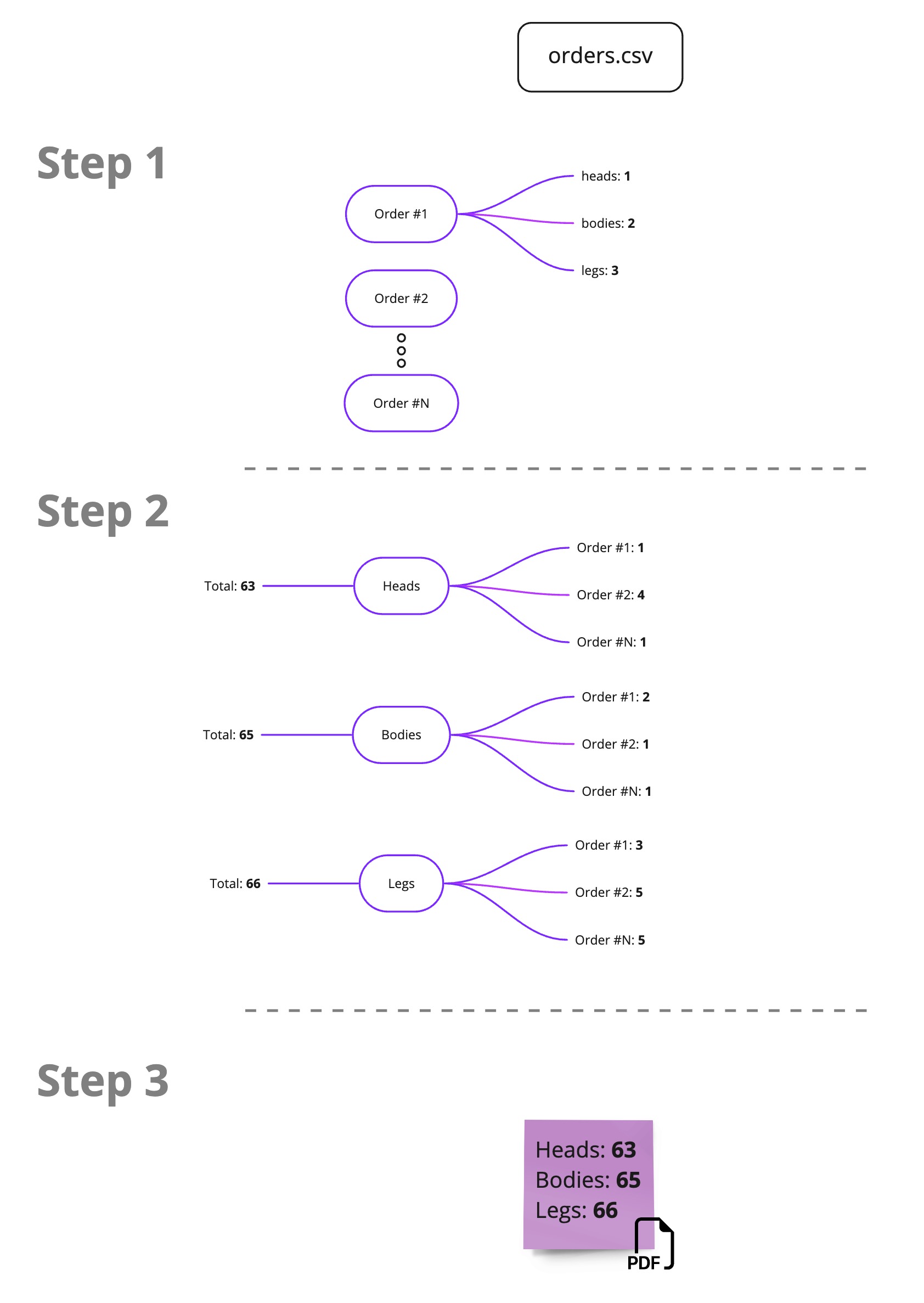
## Tasks
1. `Read And Split Orders`: Splits a list of orders from **robotsparebin-orders** input
Work Item into individual output ones.
2. `Compute Number Of Parts`: Computes a total for every requested part type: heads,
bodies and legs. Then creates an output Work Item with the total.
3. `Order The Parts In Bulk`: Generates an invoice with the total number of body parts
we have to order.
### Notes
- For the first task (#1) select the already present input Work Item to run with:
**robotsparebin-orders**
- For every subsequent task (#2, #3) select as input the last output obtained from the
previous step. Example:
- Task #1: robotsparebin-orders
- Task #2: run-2
- Task #3: run-3