https://github.com/sagnikrivud/bluetooth-control-arduino-robot
Bluetooth Control Robot
https://github.com/sagnikrivud/bluetooth-control-arduino-robot
arduino iot
Last synced: 4 months ago
JSON representation
Bluetooth Control Robot
- Host: GitHub
- URL: https://github.com/sagnikrivud/bluetooth-control-arduino-robot
- Owner: sagnikrivud
- Created: 2020-01-04T09:54:01.000Z (over 5 years ago)
- Default Branch: master
- Last Pushed: 2024-03-31T08:08:45.000Z (over 1 year ago)
- Last Synced: 2025-01-14T18:11:49.773Z (6 months ago)
- Topics: arduino, iot
- Language: C++
- Homepage:
- Size: 7.81 KB
- Stars: 0
- Watchers: 2
- Forks: 0
- Open Issues: 0
-
Metadata Files:
- Readme: README.md
Awesome Lists containing this project
README
# Bluetooth-control-Arduino-Robot

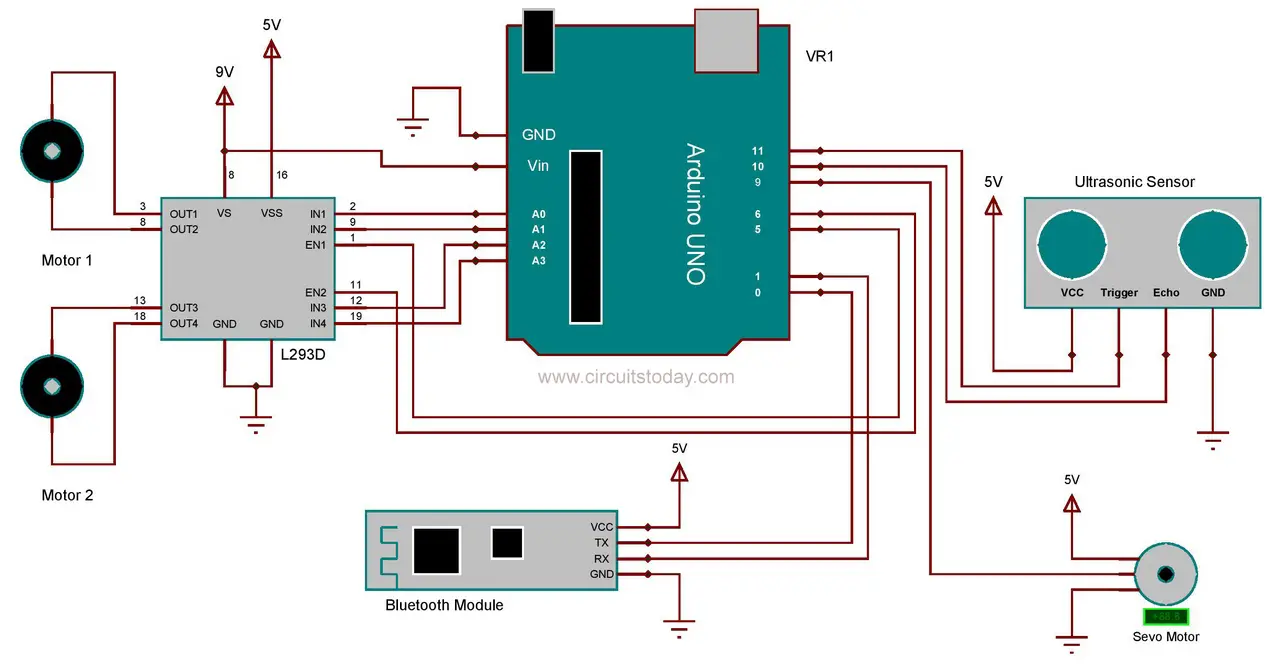
The Bluetooth-controlled Arduino bot is a small robotic vehicle that can be controlled wirelessly via Bluetooth communication. It consists of an Arduino microcontroller board, motor driver circuitry, DC motors with wheels for movement, a Bluetooth module, and a chassis to mount everything.
- The brain of the robot, is responsible for processing commands received via Bluetooth and controlling the motors accordingly.
- Typically an H-bridge motor driver like L298N or L293D, is used to control the direction and speed of the DC motors that drive the wheels.
- These provide the locomotion for the robot. The motors are controlled by the Arduino through the motor driver circuitry.
- Usually, an HC-05 or HC-06 module, facilitates wireless communication between the robot and a controlling device such as a smartphone or computer.
- Provides the structural support for mounting all the components securely.
- Typically a battery pack powers the Arduino and motors. It's essential to choose a power source that can supply enough current for the motors and other components.
The Bluetooth-controlled Arduino bot allows users to wirelessly control its movement by sending simple commands (like 'F' for forward, 'B' for backward, 'L' for left, 'R' for right, and 'S' for stop) from a Bluetooth-enabled device. These commands are received by the Arduino, interpreted, and translated into motor movements, enabling the robot to navigate its environment.