https://github.com/sefakcmn00/servo-motor-control-in-ardunio-using-handcascade-tutorial-file-in-opencv
It is the Servo motor control project of our Computer Vision work with Opencv. In this project, an Ardunio Serial port-based servo motor control project was implemented using Opencv and Cvzone artificial intelligence libraries. Below I tried to explain the details of the project step by step.
https://github.com/sefakcmn00/servo-motor-control-in-ardunio-using-handcascade-tutorial-file-in-opencv
ardunio computer-vision cvzone handcascade opencv python servo-motor
Last synced: 5 months ago
JSON representation
It is the Servo motor control project of our Computer Vision work with Opencv. In this project, an Ardunio Serial port-based servo motor control project was implemented using Opencv and Cvzone artificial intelligence libraries. Below I tried to explain the details of the project step by step.
- Host: GitHub
- URL: https://github.com/sefakcmn00/servo-motor-control-in-ardunio-using-handcascade-tutorial-file-in-opencv
- Owner: sefakcmn00
- Created: 2022-08-01T14:37:42.000Z (over 3 years ago)
- Default Branch: main
- Last Pushed: 2022-08-01T15:17:40.000Z (over 3 years ago)
- Last Synced: 2025-04-04T06:23:50.695Z (8 months ago)
- Topics: ardunio, computer-vision, cvzone, handcascade, opencv, python, servo-motor
- Language: C++
- Homepage:
- Size: 12.7 KB
- Stars: 6
- Watchers: 1
- Forks: 1
- Open Issues: 0
-
Metadata Files:
- Readme: README.md
Awesome Lists containing this project
README
-----------------------------------------------
# Servo-motor-control-in-Ardunio-using-HandCascade-tutorial-file-in-Opencv
It is the Servo motor control project of our Computer Vision work with Opencv. In this project, an Ardunio Serial port-based servo motor control project was implemented using Opencv and Cvzone artificial intelligence libraries. Below I tried to explain the details of the project step by step.
## Download Library
First, we will download the libraries we will use.
```Python
import cv2
from cvzone.HandTrackingModule import HandDetector
import numpy as np
import pyfirmata
import random
```
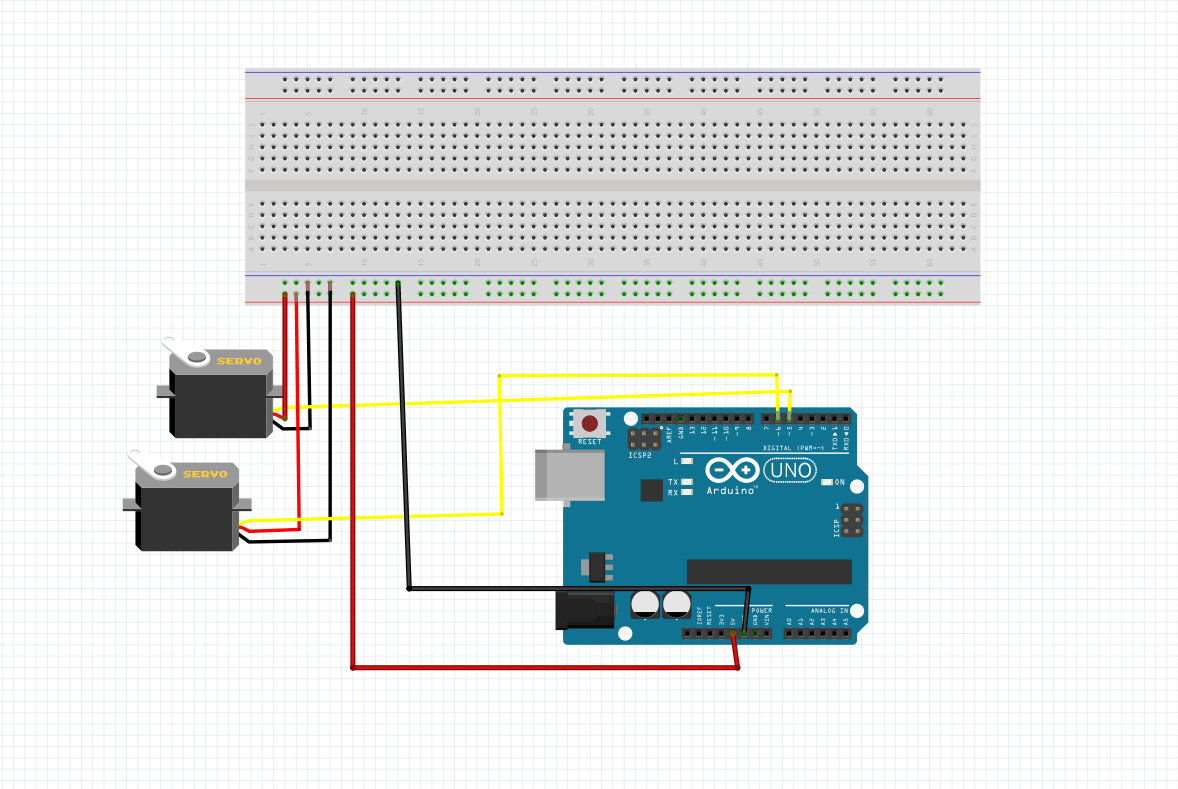
### Code block that we connect to Arduino
```Python
port = "COM5"
board = pyfirmata.Arduino(port)
servo_pinX = board.get_pin('d:5:s') #pin 5 Arduino
servo_pinY = board.get_pin('d:6:s') #pin 6 Arduino
```
We add the StandardFirmata project from the Arduino sample Firmata library. It is the library that allows Arduino to communicate with python.
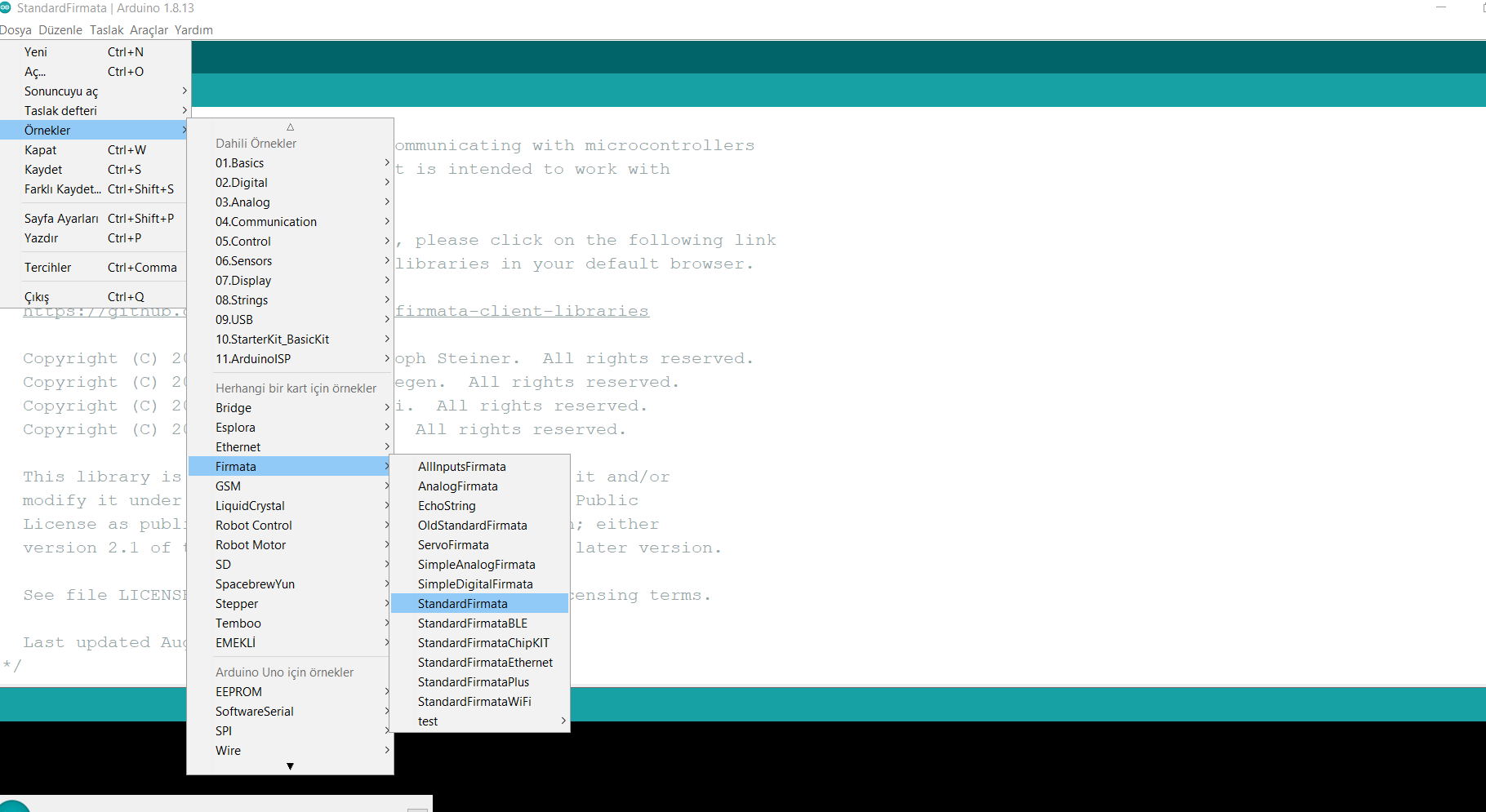
### We add the StandardFirmata project from the Arduino sample Firmata library. It is the library that allows Arduino to communicate with python.
### Python Code Blog
```Python
cap = cv2.VideoCapture(0)
cap.set(3, 1280)
cap.set(4, 720)
detector = HandDetector(detectionCon=0.8, maxHands=2)
port = "COM5"
board = pyfirmata.Arduino(port)
servo_pinX = board.get_pin('d:5:s') #pin 5 Arduino
servo_pinY = board.get_pin('d:6:s') #pin 6 Arduino
posCircle = []
posCircleTarget = []
minHand, maxHand = 20, 220
minDeg, maxDeg = 0, 180
minBar, maxBar = 400, 150
xbox, ybox = 400, 500
wbox, hbox = 450, 450
x_rand = random.randint(xbox + 25, xbox + wbox - 25)
y_rand = random.randint(ybox - hbox + 25, ybox - 25)
score = 0
edgeBox = False
while True:
success, img = cap.read()
hands = detector.findHands(img, draw = False)
if hands:
hand_l = hands[0]
lmList_l = hand_l["lmList"] # List of 21 Landmark points
length_l, info_l, img = detector.findDistance(lmList_l[8][0:2], lmList_l[4][0:2], img)
# Hand 2 (Right)
if len(hands) == 2:
hand_r = hands[1]
lmList_r = hand_r["lmList"] # List of 21 Landmark points
length_r, info_r, img = detector.findDistance(lmList_r[8][0:2], lmList_r[4][0:2], img) # with draw
xl = lmList_l[8][0]
yl = lmList_l[8][1]
xr = lmList_r[8][0]
yr = lmList_r[8][1]
# left x | right y
circleX = np.interp(length_l, [minHand, maxHand], [xbox+25, xbox+wbox-25])
circleY = np.interp(length_r, [minHand, maxHand], [ybox-25, ybox-hbox+25])
servoX = np.interp(length_l, [minHand, maxHand], [minDeg, maxDeg])
servoY = np.interp(length_r, [minHand, maxHand], [maxDeg, minDeg])
barX = np.interp(length_l, [minHand, maxHand], [minBar, maxBar])
barY = np.interp(length_r, [minHand, maxHand], [minBar, maxBar])
# circle player
posCircle = [int(circleX), int(circleY)]
cv2.circle(img, posCircle, 25, (0, 0, 255), cv2.FILLED )
if xbox+25 < posCircle[0] < xbox+wbox-25 and ybox-hbox+25 < posCircle[1] < hbox+25:
colBox = [255, 0, 0]
if edgeBox == False:
edgeBox = not edgeBox
else:
colBox = [0, 0, 255]
if edgeBox:
score = 0
edgeBox = not edgeBox
# box area
cv2.rectangle(img, (xbox, ybox+50), (xbox+wbox, ybox-hbox), colBox, 3)
cv2.rectangle(img, (xbox, ybox), (xbox+wbox, ybox+50), colBox, cv2.FILLED)
cv2.putText(img, f'Score : {score}', (xbox+80, ybox+40), cv2.FONT_HERSHEY_PLAIN, 3, (255, 255, 255), 3)
#circle target
if x_rand-35 < posCircle[0] < x_rand+35 and y_rand-35 < posCircle[1] < y_rand+35 :
x_rand = random.randint(xbox + 25, xbox + wbox - 25)
y_rand = random.randint(ybox - hbox + 25, ybox - 25)
score += 5
cv2.circle(img, (x_rand, y_rand), 25, (0, 255, 255), cv2.FILLED)
#bar
cv2.rectangle(img, (1180, 150), (1215, 400), (255, 0, 0), 3)
cv2.rectangle(img, (1180, int(barX)), (1215, 400), (0, 255, 0), cv2.FILLED)
cv2.rectangle(img, (50, 150), (85, 400), (255, 0, 0), 3)
cv2.rectangle(img, (50, int(barY)), (85, 400), (0, 255, 0), cv2.FILLED)
# servo control
servo_pinX.write(servoX)
servo_pinY.write(servoY)
cv2.imshow("Image", img)
if cv2.waitKey(1) & 0xFF==ord('q'):
break
```
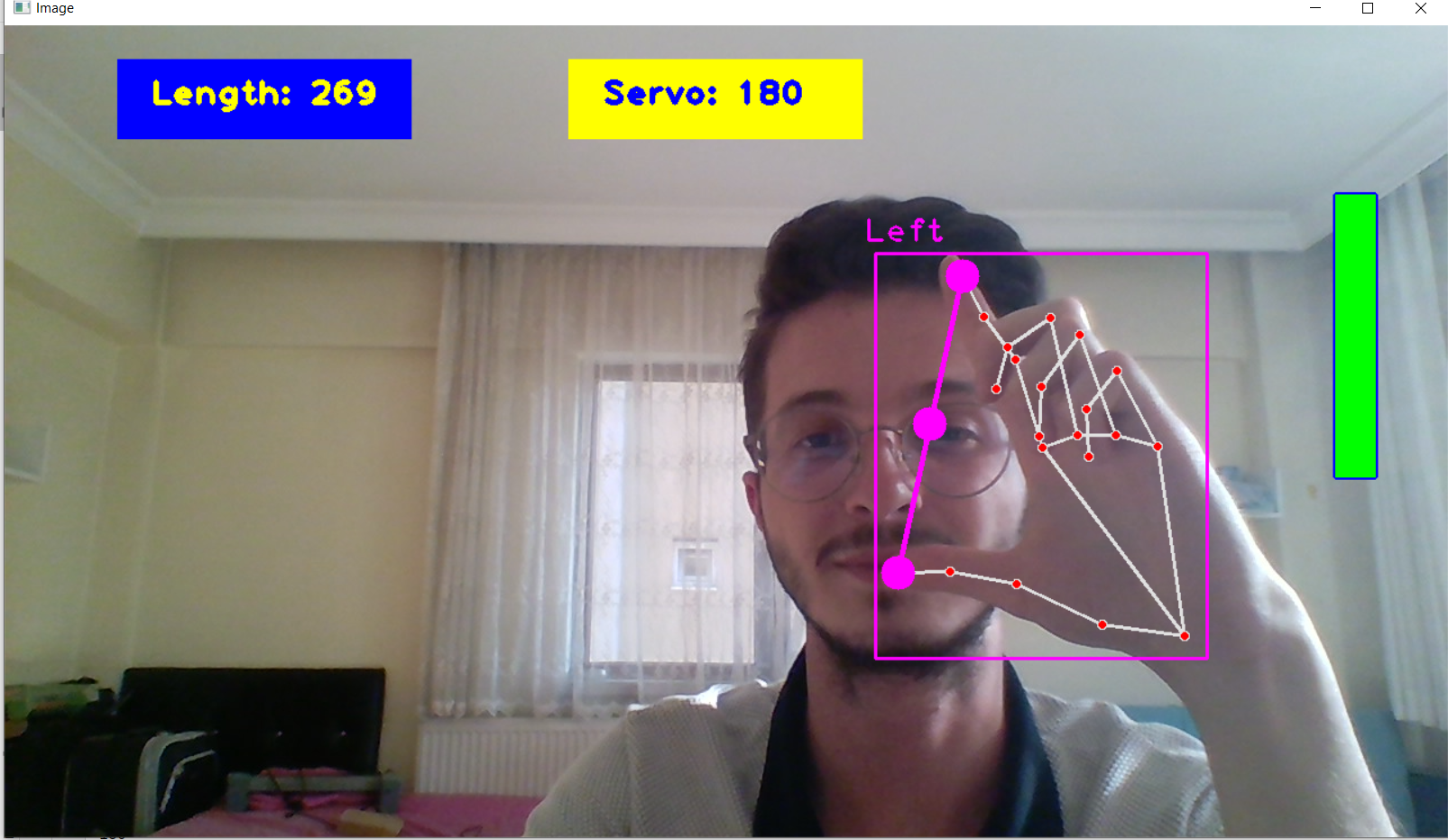
## Project Output