https://github.com/senthurayyappan/uw_dynamics
A gazebo package to aid simulation of underwater biomimetic robots.
https://github.com/senthurayyappan/uw_dynamics
gazebo robotics robots ros underwater-biomimetic-robots underwater-robotics uw-dynamics
Last synced: 11 months ago
JSON representation
A gazebo package to aid simulation of underwater biomimetic robots.
- Host: GitHub
- URL: https://github.com/senthurayyappan/uw_dynamics
- Owner: senthurayyappan
- Created: 2018-08-10T14:33:54.000Z (almost 8 years ago)
- Default Branch: master
- Last Pushed: 2023-01-11T01:42:03.000Z (over 3 years ago)
- Last Synced: 2025-07-18T12:57:10.627Z (11 months ago)
- Topics: gazebo, robotics, robots, ros, underwater-biomimetic-robots, underwater-robotics, uw-dynamics
- Language: C++
- Homepage:
- Size: 767 KB
- Stars: 6
- Watchers: 0
- Forks: 1
- Open Issues: 2
-
Metadata Files:
- Readme: README.md
- Funding: .github/FUNDING.yml
Awesome Lists containing this project
README
# uw_dynamics
## Abstract:
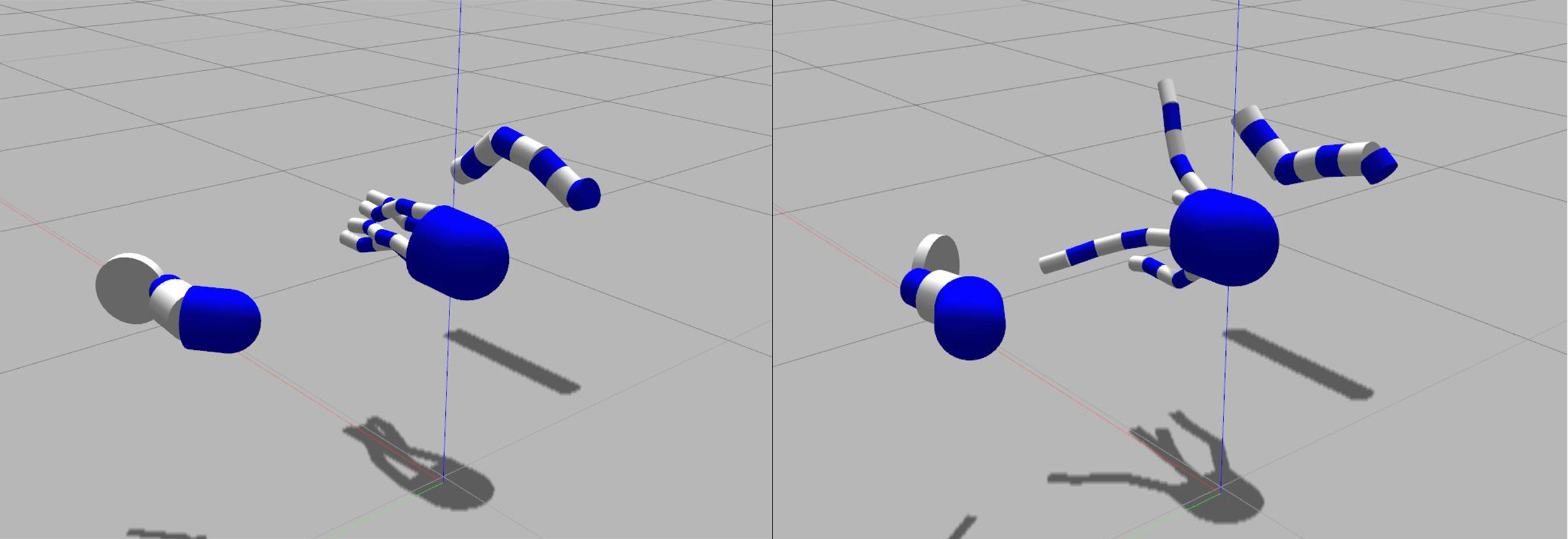
Underwater biomimetic robots are biologically inspired robots that involve complex rigid body dynamics and fluid-structure interactions. Simulation of such robots with gazebo has always been a challenging task. Unlike underwater vehicles such as ROVs and AUVs, these robots are propelled by fluid-structure interaction which are relatively hard to simulate compared to thrusters/propellers (as found in ROVs and AUVs). The proposed project aims at developing a gazebo package containing plugins capable of simulating such robots. It can also be extended to simulate biomimetic robots in fluids of various densities and even aerial biomimetic robots.
## Getting Started:
Clone the repository to the home directory,
```
$ git clone https://github.com/imsenthur/uw_dynamics.git
```
## Build:
```
$ cd uw_dynamics/
$ mkdir build
$ cd build/
$ cmake ../
$ make
```
## Add it to your GAZEBO_PLUGIN_PATH:
```
$ export GAZEBO_PLUGIN_PATH=~/uw_dyn/build/devel/lib:$GAZEBO_PLUGIN_PATH
```
## Implementation:
```
997
base_link
0 0 0
0.1
0.3
0.2
0.1
```
*Add the plugin to your robot's URDF/SDF.*