https://github.com/slevin48/self-driving
Hack self-driving dataset from Udacity & App from streamlit
https://github.com/slevin48/self-driving
car folium matlab python ros sim streamlit
Last synced: 2 months ago
JSON representation
Hack self-driving dataset from Udacity & App from streamlit
- Host: GitHub
- URL: https://github.com/slevin48/self-driving
- Owner: slevin48
- Created: 2021-01-08T18:29:52.000Z (over 5 years ago)
- Default Branch: main
- Last Pushed: 2024-05-12T21:04:06.000Z (about 2 years ago)
- Last Synced: 2025-02-24T10:25:36.225Z (over 1 year ago)
- Topics: car, folium, matlab, python, ros, sim, streamlit
- Language: Jupyter Notebook
- Homepage:
- Size: 7.08 MB
- Stars: 1
- Watchers: 1
- Forks: 0
- Open Issues: 1
-
Metadata Files:
- Readme: README.md
Awesome Lists containing this project
README
# self-driving 🚗
[](https://codespaces.new/slevin48/self-driving)
This project starts with [223GB of Driving Data](https://medium.com/udacity/open-sourcing-223gb-of-mountain-view-driving-data-f6b5593fbfa5) open sourced by Udacity.
The originial idea was to hack this driving [dataset](https://github.com/udacity/self-driving-car), the associated [app](https://github.com/streamlit/demo-self-driving/blob/master/streamlit_app.py) and [data hosted on AWS](https://streamlit-self-driving.s3-us-west-2.amazonaws.com/) by Streamlit
Hybrid training of a self-driving car, based on both images from:
| real driving data | simulation data |
| -------------------------------------------------|:------------------------------------------------:|
|  |
|  |
|
For more project on autonomous driving simulation:
* https://github.com/slevin48/gta
* https://github.com/slevin48/carla
* https://github.com/slevin48/donkeycar
## Real driving data
[Youtube - Neural Network driving a car](https://www.youtube.com/watch?v=NJU9ULQUwng&feature=emb_logo&ab_channel=IProgrammerTV)
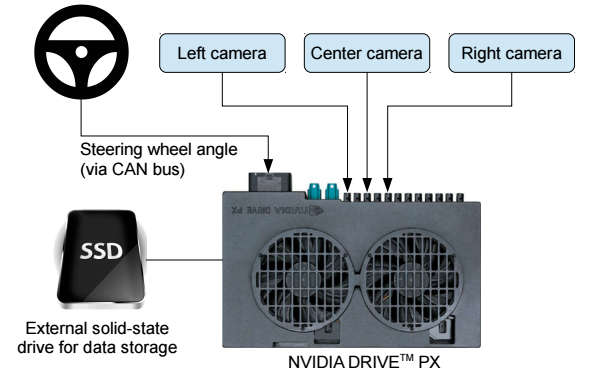
[NVIDIA paper: End to End Learning for Self-Driving Cars](https://arxiv.org/pdf/1604.07316.pdf)
### Dataset
First Download the [Driving Datasets](https://github.com/udacity/self-driving-car/tree/master/datasets) – Over 10 hours of driving data (LIDAR, camera frames and more)
```
aria2c Ch2_001.tar.gz-692ee7e0c63fb2212bfe4a62a39ce71ee9b16fb3.torrent
```
Read [How to download torrents from the command-line on Linux](https://www.addictivetips.com/ubuntu-linux-tips/download-torrents-from-the-command-line-linux/)
Untar
```
tar -xf Ch2_001.tar.gz
```
### [udacity-driving-reader](https://github.com/rwightman/udacity-driving-reader)
Build the docker
```
docker build -t udacity-reader .
```
Run the ROS bag reader
```
./run-bagdump.sh -i /data -o /output
```
### MATLAB ROS toolbox
[MATLAB rosbag Structure](https://www.mathworks.com/help/ros/ug/ros-log-files-rosbags.html):
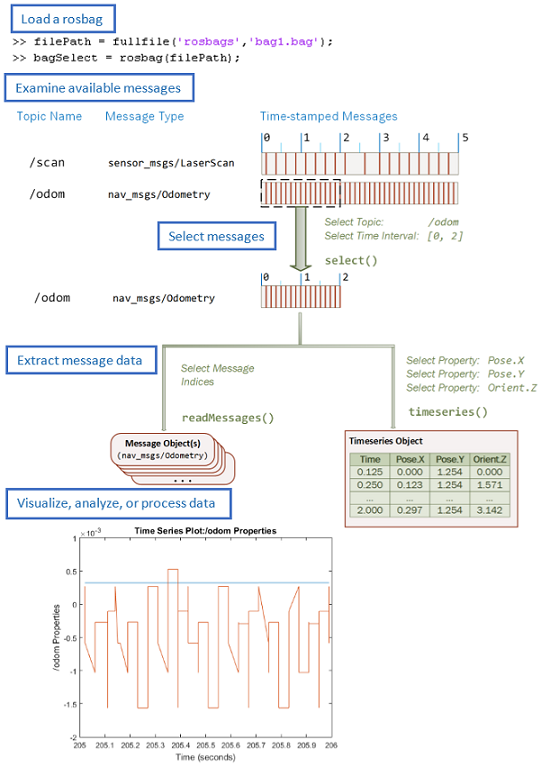
[work-with-rosbag-logfiles](https://www.mathworks.com/help/ros/ug/work-with-rosbag-logfiles.html)
```matlab
>> bag = rosbag('CH03_002')
BagSelection with properties:
FilePath: 'C:\Users\slevin\Downloads\self-driving\CH3_002\CH03_002'
StartTime: 1.4807e+09
EndTime: 1.4807e+09
NumMessages: 54456557
AvailableTopics: [36×3 table]
AvailableFrames: {0×1 cell}
MessageList: [54456557×4 table]
```
Available Topics:
```
/can_bus_dbw/can_rx 9376489 msgs : dataspeed_can_msgs/CanMessageStamped
/center_camera/camera_info 264230 msgs : sensor_msgs/CameraInfo
/center_camera/image_color/compressed 264230 msgs : sensor_msgs/CompressedImage
/diagnostics 52540 msgs : diagnostic_msgs/DiagnosticArray (4 connections)
/ecef/ 5287720 msgs : geometry_msgs/PointStamped
/fix 5287720 msgs : sensor_msgs/NavSatFix
/imu/data 5287726 msgs : sensor_msgs/Imu
/left_camera/camera_info 264276 msgs : sensor_msgs/CameraInfo
/left_camera/image_color/compressed 264276 msgs : sensor_msgs/CompressedImage
/pressure 660965 msgs : sensor_msgs/FluidPressure
/right_camera/camera_info 263840 msgs : sensor_msgs/CameraInfo
/right_camera/image_color/compressed 263840 msgs : sensor_msgs/CompressedImage
/time_reference 16020574 msgs : sensor_msgs/TimeReference
/vehicle/brake_info_report 660965 msgs : dbw_mkz_msgs/BrakeInfoReport
/vehicle/brake_report 659917 msgs : dbw_mkz_msgs/BrakeReport
/vehicle/dbw_enabled 1 msg : std_msgs/Bool
/vehicle/filtered_accel 659858 msgs : std_msgs/Float64
/vehicle/fuel_level_report 132671 msgs : dbw_mkz_msgs/FuelLevelReport
/vehicle/gear_report 263943 msgs : dbw_mkz_msgs/GearReport
/vehicle/gps/fix 13219 msgs : sensor_msgs/NavSatFix
/vehicle/gps/time 13219 msgs : sensor_msgs/TimeReference
/vehicle/gps/vel 13219 msgs : geometry_msgs/TwistStamped
/vehicle/imu/data_raw 1318634 msgs : sensor_msgs/Imu
/vehicle/joint_states 1981787 msgs : sensor_msgs/JointState
/vehicle/misc_1_report 263944 msgs : dbw_mkz_msgs/Misc1Report
/vehicle/sonar_cloud 66768 msgs : sensor_msgs/PointCloud2
/vehicle/steering_report 659858 msgs : dbw_mkz_msgs/SteeringReport
/vehicle/surround_report 66768 msgs : dbw_mkz_msgs/SurroundReport
/vehicle/suspension_report 661052 msgs : dbw_mkz_msgs/SuspensionReport
/vehicle/throttle_info_report 1321946 msgs : dbw_mkz_msgs/ThrottleInfoReport
/vehicle/throttle_report 659914 msgs : dbw_mkz_msgs/ThrottleReport
/vehicle/tire_pressure_report 26438 msgs : dbw_mkz_msgs/TirePressureReport
/vehicle/twist_controller/parameter_descriptions 1 msg : dynamic_reconfigure/ConfigDescription
/vehicle/twist_controller/parameter_updates 1 msg : dynamic_reconfigure/Config
/vehicle/wheel_speed_report 1321929 msgs : dbw_mkz_msgs/WheelSpeedReport
/velodyne_packets 132079 msgs : velodyne_msgs/VelodyneScan
```
**GPS**
```matlab
bagGps = select(bag, 'Topic', '/vehicle/gps/fix');
```

**Steering Angle**
```matlab
bagSteering = select(bag, 'Topic', '/vehicle/steering_report');
```
```matlab
bagSteering.AvailableTopics
```

```matlab
msgs = readMessages(bagSteering,'DataFormat','struct');
steering_angle = cellfun(@(m) m.SteeringWheelAngle,msgs);
Sec = cellfun(@(m) m.Header.Stamp.Sec,msgs);
Nsec = cellfun(@(m) m.Header.Stamp.Nsec,msgs);
time = datetime(Sec,"ConvertFrom","epochtime","Format","HH:mm:ss");
plot(time,steering_angle)
title("Steering Wheel Angle")
```

**Retime:** sub-sample to one point per second to sync with GPS

**Pressure**
```matlab
>> bagpressure = select(bag, 'Topic', '/pressure')
bagpressure =
BagSelection with properties:
FilePath: 'C:\Users\slevin\Downloads\self-driving\CH3_002\CH03_002'
StartTime: 1.4807e+09
EndTime: 1.4807e+09
NumMessages: 660965
AvailableTopics: [1×3 table]
AvailableFrames: {0×1 cell}
MessageList: [660965×4 table]
```
IMU (Inertial Measurement Unit)
```matlab
>> bagselect1 = select(bag, 'Topic', '/imu/data')
bagselect1 =
BagSelection with properties:
FilePath: 'C:\Users\slevin\Downloads\self-driving\CH3_002\CH03_002'
StartTime: 1.4807e+09
EndTime: 1.4807e+09
NumMessages: 5287726
AvailableTopics: [1×3 table]
AvailableFrames: {0×1 cell}
MessageList: [5287726×4 table]
```
We have more than 5 million messages, so we will filter to get only the first 30 seconds:
```matlab
>> start = bag.StartTime;
>> bagselect2 = select(bag, 'Time', [start start + 30], 'Topic', '/imu/data')
bagselect2 =
BagSelection with properties:
FilePath: 'C:\Users\slevin\Downloads\self-driving\CH3_002\CH03_002'
StartTime: 1.4807e+09
EndTime: 1.4807e+09
NumMessages: 12001
AvailableTopics: [1×3 table]
AvailableFrames: {0×1 cell}
MessageList: [12001×4 table]
```
Read selected message data
```matlab
>> msgs = readMessages(bagselect2);
>> msgs{1}
ans =
ROS Imu message with properties:
MessageType: 'sensor_msgs/Imu'
Header: [1×1 Header]
Orientation: [1×1 Quaternion]
AngularVelocity: [1×1 Vector3]
LinearAcceleration: [1×1 Vector3]
OrientationCovariance: [9×1 double]
AngularVelocityCovariance: [9×1 double]
LinearAccelerationCovariance: [9×1 double]
Use showdetails to show the contents of the message
```
Read as timeseries
```matlab
>> ts = timeseries(bagselect2)
timeseries
Common Properties:
Name: '/imu/data Properties'
Time: [12001x1 double]
TimeInfo: [1x1 tsdata.timemetadata]
Data: [12001x13 double]
DataInfo: [1x1 tsdata.datametadata]
More properties, Methods
```
```matlab
figure
plot(ts, 'LineWidth', 3)
```

### S3 hosting
Host the real driving dataset on AWS S3 bucket, and [allow public access to the bucket](https://havecamerawilltravel.com/photographer/how-allow-public-access-amazon-bucket/)
Access Photos from Python, by building a list ([save list to CSV](https://www.geeksforgeeks.org/python-save-list-to-csv/))
```python
import os
import pandas as pd
list = os.listdir()
df = pd.DataFrame(list,columns=['photo'])
df.to_csv('photos.csv',index=False)
```
Display frames & steering angle with a streamlit app:

```
streamlit run car_app.py
```
## Simulated driving data
[self-driving-car-simulator](https://github.com/udacity/self-driving-car-sim)

```
streamlit run car_app.py
```
(Turn on wide mode in settings in the upper right of the app)
## KITTI: precursor self-driving dataset
From the Karlsruhe Institute of Technology:
* [**Paper** - Vision meets Robotics: The KITTI Dataset](https://www.mrt.kit.edu/z/publ/download/2013/GeigerAl2013IJRR.pdf)
* [KITTI Vision Benchmark Suite](http://www.cvlibs.net/datasets/kitti/)
## Resources:
* https://github.com/tawnkramer/sdsandbox
* https://github.com/naokishibuya/car-behavioral-cloning
* https://github.com/llSourcell/How_to_simulate_a_self_driving_car
* https://github.com/ManajitPal/DeepLearningForSelfDrivingCars
* https://www.youtube.com/watch?v=EaY5QiZwSP4&ab_channel=SirajRaval
* https://developer.nvidia.com/blog/deep-learning-self-driving-cars/
* https://github.com/SullyChen/Autopilot-TensorFlow
