https://github.com/taciturnaxolotl/myrus
a scrappy gimbal that insults you in shakespearean english
https://github.com/taciturnaxolotl/myrus
gimble hackclub scrapyard
Last synced: 28 days ago
JSON representation
a scrappy gimbal that insults you in shakespearean english
- Host: GitHub
- URL: https://github.com/taciturnaxolotl/myrus
- Owner: taciturnaxolotl
- License: agpl-3.0
- Created: 2025-03-15T17:54:21.000Z (about 1 month ago)
- Default Branch: main
- Last Pushed: 2025-03-17T00:01:10.000Z (about 1 month ago)
- Last Synced: 2025-03-28T19:13:13.640Z (about 1 month ago)
- Topics: gimble, hackclub, scrapyard
- Language: Kotlin
- Homepage: https://myrus.dunkirk.sh/
- Size: 5.26 MB
- Stars: 2
- Watchers: 1
- Forks: 0
- Open Issues: 1
-
Metadata Files:
- Readme: README.md
- Contributing: CONTRIBUTING.md
- License: LICENSE.md
- Code of conduct: CODE_OF_CONDUCT.md
- Codeowners: .github/CODEOWNERS
Awesome Lists containing this project
README
# Myrus

this is my team's project for `scrapyard columbus` we are making a gymbal that is controlled by a phone app that tracks faces; comunication is done over ~[`iroh`](https://www.iroh.computer/)~ `webserial` and the gymbal is controlled by the hackclub [`blot`](https://blot.hackclub.com) control board jerry rigged to an orpheus pico. you can see a demo of the app at https://www.youtube.com/watch?v=buTqpQQnUd0
## pins
| Pico Pin | Blot Pin | Description |
|----------|----------|-------------|
| `GP11` | `D10` | Step signal for Motor 1 |
| `GP10` | `D9` | Direction control for Motor 1 |
| `GP9` | `D2` | Enable/disable control for both motors |
| `GP8` | `D8` | Step signal for Motor 2 |
| `GP7` | `D7` | Direction control for Motor 2 |
| `GP9` | `D1` | Enable/disable control for both motors |
| `GND` | `GND` | Ground |
| `3V3` | `3V3` | Power |
## firmware
The firmware is written in circuitpython and is in the [`firmware`](/firmware) directory.
The firmware sends complete rotations based on serial input in two formats:
- `[1 or 2] [number]` -> rotate to a position in complete rotations
- `[1 or 2] zero` -> set current position as zero
The control is absolute - you specify the rotation count you want to go to rather than relative movement.
Important notes:
- Using 200 steps/rotation * 16 microsteps (very precise control)
- Motors must be enabled by setting enable pin LOW
- Movement speed controlled by delay between steps (currently 0.0001s)
- Supports two motors controlled independently
- Coordinates maintained in number of steps from zero
- Direction controlled automatically based on target vs current position
- Movement is blocking - the pico will not respond to serial commands while moving
## web interface
The web interface is a pwa that is served from cloudflare pages. It uses the web serial api to communicate with the pico. The web interface is hosted at [myrus.dunkirk.sh](https://myrus.dunkirk.sh).
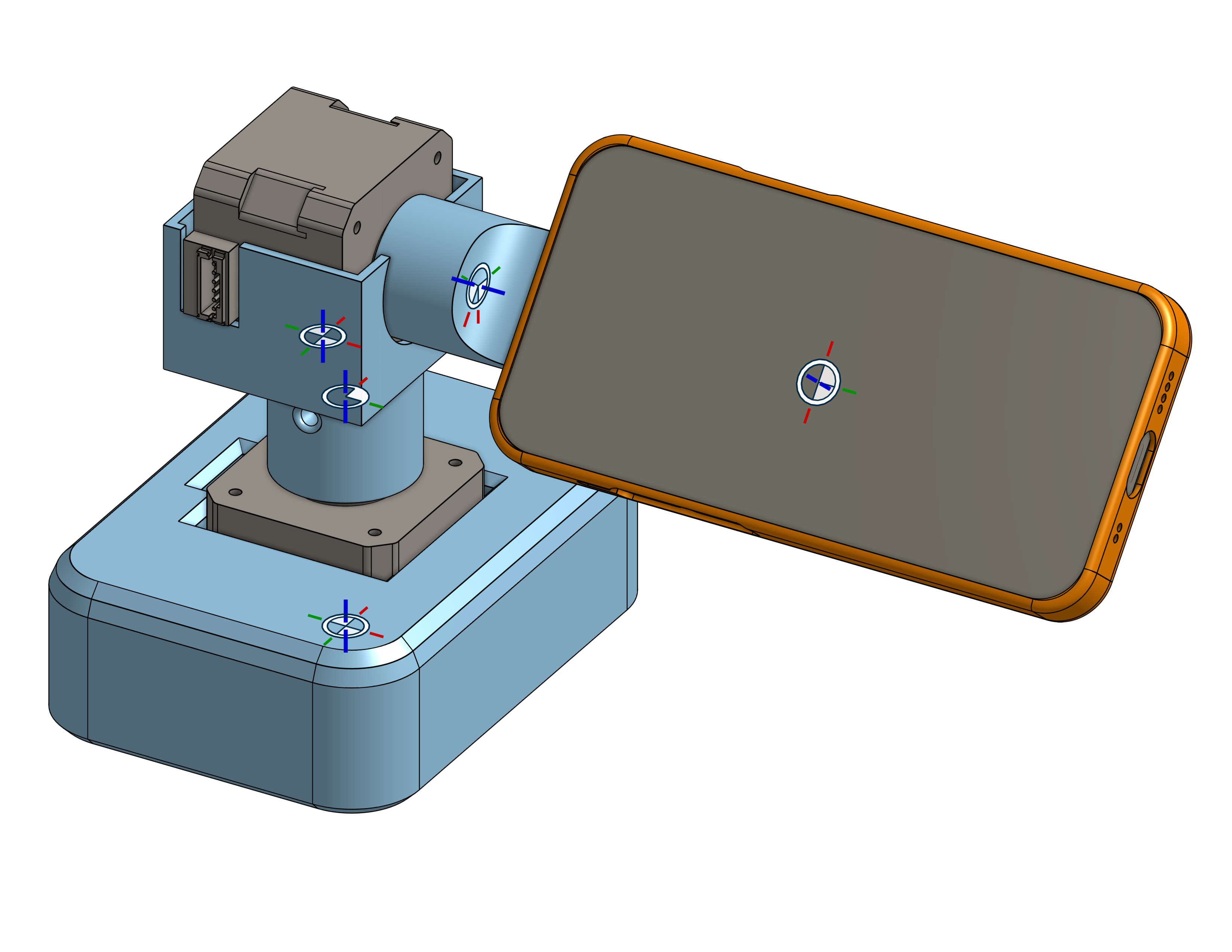
## cad
The cad was done in onshape around midnight of the `15th` and can be found and exported from here: [cad.onshape.com/documents/8d200c472...](https://cad.onshape.com/documents/8d200c472fc5b660efdf8352/w/ff1d53ebe00121ac7a3c9bc5/e/6edac687c4356b98c8934741?renderMode=0&uiState=67d649b588856c134638cb6b)
## schematics / blueprints



© 2025-present Kieran Klukas, Payton Curry, and Elizabeth Klukas
