https://github.com/taki0112/vit-tensorflow
Vision Transformer Cookbook with Tensorflow
https://github.com/taki0112/vit-tensorflow
Last synced: 10 months ago
JSON representation
Vision Transformer Cookbook with Tensorflow
- Host: GitHub
- URL: https://github.com/taki0112/vit-tensorflow
- Owner: taki0112
- License: mit
- Created: 2022-03-25T05:28:34.000Z (about 4 years ago)
- Default Branch: main
- Last Pushed: 2022-03-28T07:19:21.000Z (about 4 years ago)
- Last Synced: 2025-05-20T02:06:50.975Z (about 1 year ago)
- Language: Python
- Homepage:
- Size: 7.34 MB
- Stars: 334
- Watchers: 5
- Forks: 52
- Open Issues: 3
-
Metadata Files:
- Readme: README.md
- License: LICENSE
Awesome Lists containing this project
- awesome-list - vit-tensorflow - A collection of Vision Transformer implementations, based on TensorFlow. (Computer Vision / General Purpose CV)
README
# Vision Transformer Cookbook with Tensorflow

## Author
* [Junho Kim](http://bit.ly/jhkim_resume)
### Acknowledgement
* Appreciate to [@lucidrains](https://github.com/lucidrains) for his permission to release this repository.
* [vit-pytorch](https://github.com/lucidrains/vit-pytorch)
## Table of Contents
- [Vision Transformer - Tensorflow](#vision-transformer---tensorflow)
- [Usage](#usage)
- [Parameters](#parameters)
- [Distillation](#distillation)
- [Deep ViT](#deep-vit)
- [CaiT](#cait)
- [Token-to-Token ViT](#token-to-token-vit)
- [CCT](#cct)
- [Cross ViT](#cross-vit)
- [PiT](#pit)
- [LeViT](#levit)
- [CvT](#cvt)
- [Twins SVT](#twins-svt)
- [CrossFormer](#crossformer)
- [RegionViT](#regionvit)
- [ScalableViT](#scalablevit)
- [NesT](#nest)
- [MobileViT](#mobilevit)
- [Masked Autoencoder](#masked-autoencoder)
- [Simple Masked Image Modeling](#simple-masked-image-modeling)
- [Masked Patch Prediction](#masked-patch-prediction)
- [Adaptive Token Sampling](#adaptive-token-sampling)
- [Patch Merger](#patch-merger)
- [Vision Transformer for Small Datasets](#vision-transformer-for-small-datasets)
- [Parallel ViT](#parallel-vit)
- [FAQ](#faq)
- [Resources](#resources)
## Vision Transformer - Tensorflow ( >= 2.3.0)
Implementation of Vision Transformer, a simple way to achieve SOTA in vision classification with only a single transformer encoder, in Tensorflow. Significance is further explained in Yannic Kilcher's video. There's really not much to code here, but may as well lay it out for everyone so we expedite the attention revolution.
## Usage
```python
import tensorflow as tf
from vit_tensorflow import ViT
v = ViT(
image_size = 256,
patch_size = 32,
num_classes = 1000,
dim = 1024,
depth = 6,
heads = 16,
mlp_dim = 2048,
dropout = 0.1,
emb_dropout = 0.1
)
img = tf.random.normal([1, 256, 256, 3])
preds = v(img) # (1, 1000)
```
## Parameters
- `image_size`: int.
Image size. If you have rectangular images, make sure your image size is the maximum of the width and height
- `patch_size`: int.
Number of patches. `image_size` must be divisible by `patch_size`.
The number of patches is: ` n = (image_size // patch_size) ** 2` and `n` **must be greater than 16**.
- `num_classes`: int.
Number of classes to classify.
- `dim`: int.
Last dimension of output tensor after linear transformation `nn.Linear(..., dim)`.
- `depth`: int.
Number of Transformer blocks.
- `heads`: int.
Number of heads in Multi-head Attention layer.
- `mlp_dim`: int.
Dimension of the MLP (FeedForward) layer.
- `dropout`: float between `[0, 1]`, default `0.`.
Dropout rate.
- `emb_dropout`: float between `[0, 1]`, default `0`.
Embedding dropout rate.
- `pool`: string, either `cls` token pooling or `mean` pooling
## Distillation

A recent paper has shown that use of a distillation token for distilling knowledge from convolutional nets to vision transformer can yield small and efficient vision transformers. This repository offers the means to do distillation easily.
ex. distilling from Resnet50 (or any teacher) to a vision transformer
```python
import tensorflow as tf
<<<<<<< HEAD
=======
>>>>>>> 4d94a87a458fa952a88f56d1e188eef5524a895a
from vit_tensorflow.distill import DistillableViT, DistillWrapper
teacher = tf.keras.applications.resnet50.ResNet50()
v = DistillableViT(
image_size = 256,
patch_size = 32,
num_classes = 1000,
dim = 1024,
depth = 6,
heads = 8,
mlp_dim = 2048,
dropout = 0.1,
emb_dropout = 0.1
)
distiller = DistillWrapper(
student = v,
teacher = teacher,
temperature = 3, # temperature of distillation
alpha = 0.5, # trade between main loss and distillation loss
hard = False # whether to use soft or hard distillation
)
img = tf.random.normal([2, 256, 256, 3])
labels = tf.random.uniform(shape=[2, ], minval=0, maxval=1000, dtype=tf.int32)
labels = tf.one_hot(labels, depth=1000, axis=-1)
loss = distiller([img, labels])
# after lots of training above ...
pred = v(img) # (2, 1000)
```
## Deep ViT
This paper notes that ViT struggles to attend at greater depths (past 12 layers), and suggests mixing the attention of each head post-softmax as a solution, dubbed Re-attention. The results line up with the Talking Heads paper from NLP.
You can use it as follows
```python
import tensorflow as tf
from vit_tensorflow.deepvit import DeepViT
v = DeepViT(
image_size = 256,
patch_size = 32,
num_classes = 1000,
dim = 1024,
depth = 6,
heads = 16,
mlp_dim = 2048,
dropout = 0.1,
emb_dropout = 0.1
)
img = tf.random.normal([1, 256, 256, 3])
preds = v(img) # (1, 1000)
```
## CaiT
This paper also notes difficulty in training vision transformers at greater depths and proposes two solutions. First it proposes to do per-channel multiplication of the output of the residual block. Second, it proposes to have the patches attend to one another, and only allow the CLS token to attend to the patches in the last few layers.
They also add Talking Heads, noting improvements
You can use this scheme as follows
```python
import tensorflow as tf
from vit_tensorflow.cait import CaiT
v = CaiT(
image_size = 256,
patch_size = 32,
num_classes = 1000,
dim = 1024,
depth = 12, # depth of transformer for patch to patch attention only
cls_depth = 2, # depth of cross attention of CLS tokens to patch
heads = 16,
mlp_dim = 2048,
dropout = 0.1,
emb_dropout = 0.1,
layer_dropout = 0.05 # randomly dropout 5% of the layers
)
img = tf.random.normal([1, 256, 256, 3])
preds = v(img) # (1, 1000)
```
## Token-to-Token ViT

This paper proposes that the first couple layers should downsample the image sequence by unfolding, leading to overlapping image data in each token as shown in the figure above. You can use this variant of the `ViT` as follows.
```python
import tensorflow as tf
from vit_tensorflow.t2t import T2TViT
v = T2TViT(
dim = 512,
image_size = 224,
depth = 5,
heads = 8,
mlp_dim = 512,
num_classes = 1000,
t2t_layers = ((7, 4), (3, 2), (3, 2)) # tuples of the kernel size and stride of each consecutive layers of the initial token to token module
)
img = tf.random.normal([1, 224, 224, 3])
preds = v(img) # (1, 1000)
```
## CCT
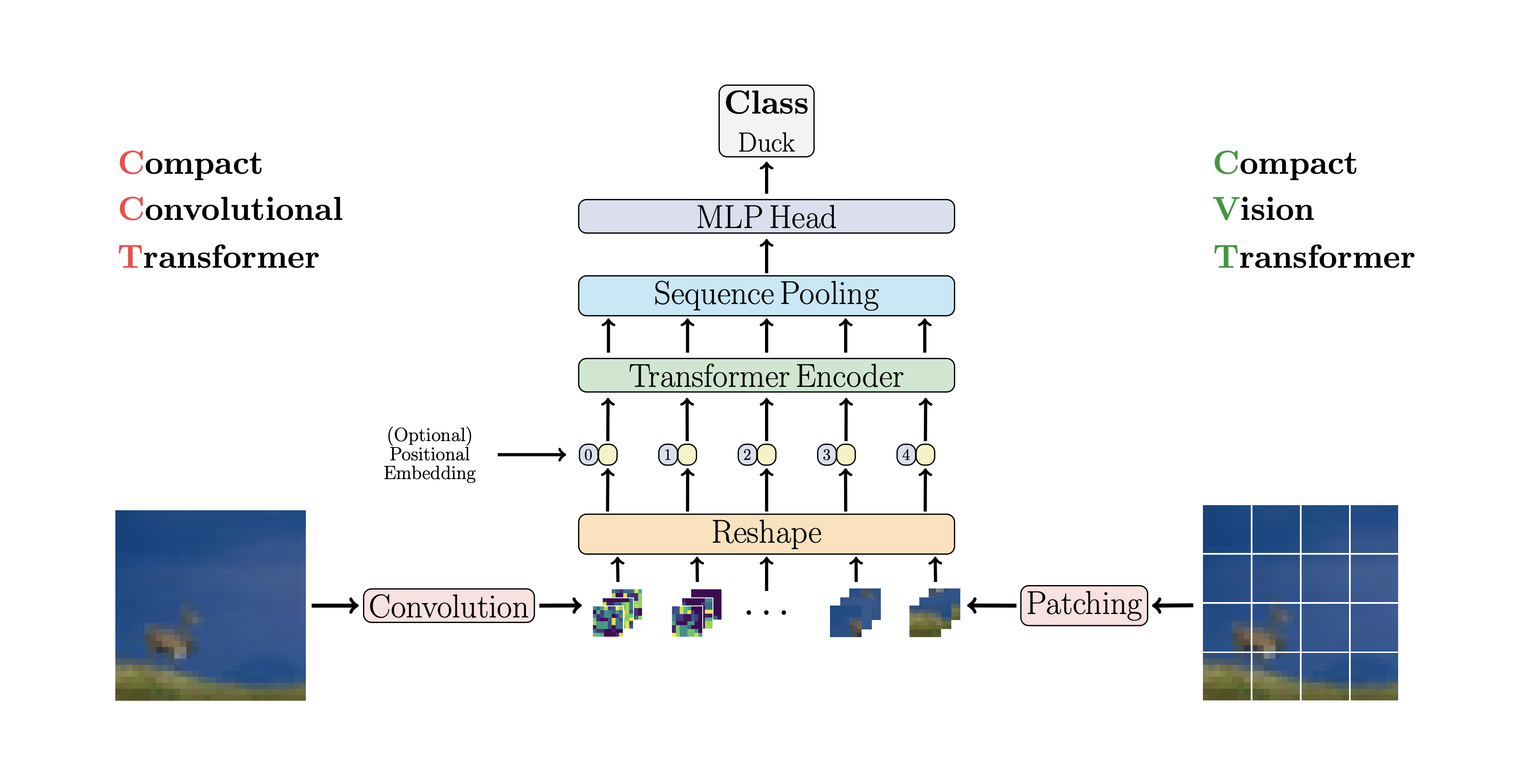
CCT proposes compact transformers
by using convolutions instead of patching and performing sequence pooling. This
allows for CCT to have high accuracy and a low number of parameters.
You can use this with two methods
```python
import tensorflow as tf
from vit_tensorflow.cct import CCT
<<<<<<< HEAD
model = CCT(
img_size=224,
embedding_dim=384,
n_conv_layers=2,
kernel_size=7,
stride=2,
padding=3,
pooling_kernel_size=3,
pooling_stride=2,
pooling_padding=1,
num_layers=14,
num_heads=6,
mlp_radio=3.,
num_classes=1000,
positional_embedding='learnable', # ['sine', 'learnable', 'none']
)
=======
cct = CCT(
img_size = (224, 448),
embedding_dim = 384,
n_conv_layers = 2,
kernel_size = 7,
stride = 2,
padding = 3,
pooling_kernel_size = 3,
pooling_stride = 2,
pooling_padding = 1,
num_layers = 14,
num_heads = 6,
mlp_radio = 3.,
num_classes = 1000,
positional_embedding = 'learnable', # ['sine', 'learnable', 'none']
)
img = tf.random.normal(shape=[1, 224, 448, 3])
preds = cct(img) # (1, 1000)
>>>>>>> 4d94a87a458fa952a88f56d1e188eef5524a895a
```
Alternatively you can use one of several pre-defined models `[2,4,6,7,8,14,16]`
which pre-define the number of layers, number of attention heads, the mlp ratio,
and the embedding dimension.
```python
import tensorflow as tf
from vit_tensorflow.cct import cct_14
<<<<<<< HEAD
model = cct_14(
img_size=224,
n_conv_layers=1,
kernel_size=7,
stride=2,
padding=3,
pooling_kernel_size=3,
pooling_stride=2,
pooling_padding=1,
num_classes=1000,
positional_embedding='learnable', # ['sine', 'learnable', 'none']
)
=======
cct = cct_14(
img_size = 224,
n_conv_layers = 1,
kernel_size = 7,
stride = 2,
padding = 3,
pooling_kernel_size = 3,
pooling_stride = 2,
pooling_padding = 1,
num_classes = 1000,
positional_embedding = 'learnable', # ['sine', 'learnable', 'none']
)
>>>>>>> 4d94a87a458fa952a88f56d1e188eef5524a895a
```
Official
Repository includes links to pretrained model checkpoints.
## Cross ViT

This paper proposes to have two vision transformers processing the image at different scales, cross attending to one every so often. They show improvements on top of the base vision transformer.
```python
import tensorflow as tf
from vit_tensorflow.cross_vit import CrossViT
v = CrossViT(
image_size = 256,
num_classes = 1000,
depth = 4, # number of multi-scale encoding blocks
sm_dim = 192, # high res dimension
sm_patch_size = 16, # high res patch size (should be smaller than lg_patch_size)
sm_enc_depth = 2, # high res depth
sm_enc_heads = 8, # high res heads
sm_enc_mlp_dim = 2048, # high res feedforward dimension
lg_dim = 384, # low res dimension
lg_patch_size = 64, # low res patch size
lg_enc_depth = 3, # low res depth
lg_enc_heads = 8, # low res heads
lg_enc_mlp_dim = 2048, # low res feedforward dimensions
cross_attn_depth = 2, # cross attention rounds
cross_attn_heads = 8, # cross attention heads
dropout = 0.1,
emb_dropout = 0.1
)
img = tf.random.normal([1, 256, 256, 3])
pred = v(img) # (1, 1000)
```
## PiT

This paper proposes to downsample the tokens through a pooling procedure using depth-wise convolutions.
```python
import tensorflow as tf
from vit_tensorflow.pit import PiT
v = PiT(
image_size = 224,
patch_size = 14,
dim = 256,
num_classes = 1000,
depth = (3, 3, 3), # list of depths, indicating the number of rounds of each stage before a downsample
heads = 16,
mlp_dim = 2048,
dropout = 0.1,
emb_dropout = 0.1
)
# forward pass now returns predictions and the attention maps
img = tf.random.normal([1, 224, 224, 3])
preds = v(img) # (1, 1000)
```
## LeViT

This paper proposes a number of changes, including (1) convolutional embedding instead of patch-wise projection (2) downsampling in stages (3) extra non-linearity in attention (4) 2d relative positional biases instead of initial absolute positional bias (5) batchnorm in place of layernorm.
```python
import tensorflow as tf
from vit_tensorflow.levit import LeViT
levit = LeViT(
image_size = 224,
num_classes = 1000,
stages = 3, # number of stages
dim = (256, 384, 512), # dimensions at each stage
depth = 4, # transformer of depth 4 at each stage
heads = (4, 6, 8), # heads at each stage
mlp_mult = 2,
dropout = 0.1
)
img = tf.random.normal([1, 224, 224, 3])
levit(img) # (1, 1000)
```
## CvT

This paper proposes mixing convolutions and attention. Specifically, convolutions are used to embed and downsample the image / feature map in three stages. Depthwise-convoltion is also used to project the queries, keys, and values for attention.
```python
import tensorflow as tf
from vit_tensorflow.cvt import CvT
v = CvT(
num_classes = 1000,
s1_emb_dim = 64, # stage 1 - dimension
s1_emb_kernel = 7, # stage 1 - conv kernel
s1_emb_stride = 4, # stage 1 - conv stride
s1_proj_kernel = 3, # stage 1 - attention ds-conv kernel size
s1_kv_proj_stride = 2, # stage 1 - attention key / value projection stride
s1_heads = 1, # stage 1 - heads
s1_depth = 1, # stage 1 - depth
s1_mlp_mult = 4, # stage 1 - feedforward expansion factor
s2_emb_dim = 192, # stage 2 - (same as above)
s2_emb_kernel = 3,
s2_emb_stride = 2,
s2_proj_kernel = 3,
s2_kv_proj_stride = 2,
s2_heads = 3,
s2_depth = 2,
s2_mlp_mult = 4,
s3_emb_dim = 384, # stage 3 - (same as above)
s3_emb_kernel = 3,
s3_emb_stride = 2,
s3_proj_kernel = 3,
s3_kv_proj_stride = 2,
s3_heads = 4,
s3_depth = 10,
s3_mlp_mult = 4,
dropout = 0.
)
img = tf.random.normal([1, 224, 224, 3])
pred = v(img) # (1, 1000)
```
## Twins SVT

This paper proposes mixing local and global attention, along with position encoding generator (proposed in CPVT) and global average pooling, to achieve the same results as Swin, without the extra complexity of shifted windows, CLS tokens, nor positional embeddings.
```python
import tensorflow as tf
from vit_tensorflow.twins_svt import TwinsSVT
model = TwinsSVT(
num_classes = 1000, # number of output classes
s1_emb_dim = 64, # stage 1 - patch embedding projected dimension
s1_patch_size = 4, # stage 1 - patch size for patch embedding
s1_local_patch_size = 7, # stage 1 - patch size for local attention
s1_global_k = 7, # stage 1 - global attention key / value reduction factor, defaults to 7 as specified in paper
s1_depth = 1, # stage 1 - number of transformer blocks (local attn -> ff -> global attn -> ff)
s2_emb_dim = 128, # stage 2 (same as above)
s2_patch_size = 2,
s2_local_patch_size = 7,
s2_global_k = 7,
s2_depth = 1,
s3_emb_dim = 256, # stage 3 (same as above)
s3_patch_size = 2,
s3_local_patch_size = 7,
s3_global_k = 7,
s3_depth = 5,
s4_emb_dim = 512, # stage 4 (same as above)
s4_patch_size = 2,
s4_local_patch_size = 7,
s4_global_k = 7,
s4_depth = 4,
peg_kernel_size = 3, # positional encoding generator kernel size
dropout = 0. # dropout
)
img = tf.random.normal([1, 224, 224, 3])
pred = model(img) # (1, 1000)
```
## RegionViT


This paper proposes to divide up the feature map into local regions, whereby the local tokens attend to each other. Each local region has its own regional token which then attends to all its local tokens, as well as other regional tokens.
You can use it as follows
```python
import tensorflow as tf
from vit_tensorflow.regionvit import RegionViT
model = RegionViT(
dim = (64, 128, 256, 512), # tuple of size 4, indicating dimension at each stage
depth = (2, 2, 8, 2), # depth of the region to local transformer at each stage
window_size = 7, # window size, which should be either 7 or 14
num_classes = 1000, # number of output classes
tokenize_local_3_conv = False, # whether to use a 3 layer convolution to encode the local tokens from the image. the paper uses this for the smaller models, but uses only 1 conv (set to False) for the larger models
use_peg = False, # whether to use positional generating module. they used this for object detection for a boost in performance
)
img = tf.random.normal([1, 224, 224, 3])
pred = model(img) # (1, 1000)
```
## CrossFormer


This paper beats PVT and Swin using alternating local and global attention. The global attention is done across the windowing dimension for reduced complexity, much like the scheme used for axial attention.
They also have cross-scale embedding layer, which they shown to be a generic layer that can improve all vision transformers. Dynamic relative positional bias was also formulated to allow the net to generalize to images of greater resolution.
```python
import tensorflow as tf
from vit_tensorflow.crossformer import CrossFormer
model = CrossFormer(
num_classes = 1000, # number of output classes
dim = (64, 128, 256, 512), # dimension at each stage
depth = (2, 2, 8, 2), # depth of transformer at each stage
global_window_size = (8, 4, 2, 1), # global window sizes at each stage
local_window_size = 7, # local window size (can be customized for each stage, but in paper, held constant at 7 for all stages)
)
img = tf.random.normal([1, 224, 224, 3])
pred = model(img) # (1, 1000)
```
## ScalableViT


This Bytedance AI paper proposes the Scalable Self Attention (SSA) and the Interactive Windowed Self Attention (IWSA) modules. The SSA alleviates the computation needed at earlier stages by reducing the key / value feature map by some factor (`reduction_factor`), while modulating the dimension of the queries and keys (`ssa_dim_key`). The IWSA performs self attention within local windows, similar to other vision transformer papers. However, they add a residual of the values, passed through a convolution of kernel size 3, which they named Local Interactive Module (LIM).
They make the claim in this paper that this scheme outperforms Swin Transformer, and also demonstrate competitive performance against Crossformer.
You can use it as follows (ex. ScalableViT-S)
```python
import tensorflow as tf
from vit_tensorflow.scalable_vit import ScalableViT
model = ScalableViT(
num_classes = 1000,
dim = 64, # starting model dimension. at every stage, dimension is doubled
heads = (2, 4, 8, 16), # number of attention heads at each stage
depth = (2, 2, 20, 2), # number of transformer blocks at each stage
ssa_dim_key = (40, 40, 40, 32), # the dimension of the attention keys (and queries) for SSA. in the paper, they represented this as a scale factor on the base dimension per key (ssa_dim_key / dim_key)
reduction_factor = (8, 4, 2, 1), # downsampling of the key / values in SSA. in the paper, this was represented as (reduction_factor ** -2)
window_size = (64, 32, None, None), # window size of the IWSA at each stage. None means no windowing needed
dropout = 0.1, # attention and feedforward dropout
)
img = tf.random.normal([1, 256, 256, 3])
preds = model(img) # (1, 1000)
```
## NesT

This paper decided to process the image in hierarchical stages, with attention only within tokens of local blocks, which aggregate as it moves up the heirarchy. The aggregation is done in the image plane, and contains a convolution and subsequent maxpool to allow it to pass information across the boundary.
You can use it with the following code (ex. NesT-T)
```python
import tensorflow as tf
from vit_tensorflow.nest import NesT
nest = NesT(
image_size = 224,
patch_size = 4,
dim = 96,
heads = 3,
num_hierarchies = 3, # number of hierarchies
block_repeats = (2, 2, 8), # the number of transformer blocks at each heirarchy, starting from the bottom
num_classes = 1000
)
img = tf.random.normal([1, 224, 224, 3])
pred = nest(img) # (1, 1000)
```
## MobileViT

This paper introduce MobileViT, a light-weight and general purpose vision transformer for mobile devices. MobileViT presents a different
perspective for the global processing of information with transformers.
You can use it with the following code (ex. mobilevit_xs)
```python
import tensorflow as tf
from vit_tensorflow.mobile_vit import MobileViT
mbvit_xs = MobileViT(
image_size = (256, 256),
dims = [96, 120, 144],
channels = [16, 32, 48, 48, 64, 64, 80, 80, 96, 96, 384],
num_classes = 1000
)
img = tf.random.normal([1, 256, 256, 3])
pred = mbvit_xs(img) # (1, 1000)
```
## Simple Masked Image Modeling

This paper proposes a simple masked image modeling (SimMIM) scheme, using only a linear projection off the masked tokens into pixel space followed by an L1 loss with the pixel values of the masked patches. Results are competitive with other more complicated approaches.
You can use this as follows
```python
import tensorflow as tf
from vit_tensorflow import ViT
from vit_tensorflow.simmim import SimMIM
v = ViT(
image_size = 256,
patch_size = 32,
num_classes = 1000,
dim = 1024,
depth = 6,
heads = 8,
mlp_dim = 2048
)
mim = SimMIM(
encoder = v,
masking_ratio = 0.5 # they found 50% to yield the best results
)
images = tf.random.normal([8, 256, 256, 3])
loss = mim(images)
# that's all!
# do the above in a for loop many times with a lot of images and your vision transformer will learn
```
## Masked Autoencoder

A new Kaiming He paper proposes a simple autoencoder scheme where the vision transformer attends to a set of unmasked patches, and a smaller decoder tries to reconstruct the masked pixel values.
You can use it with the following code
```python
import tensorflow as tf
from vit_tensorflow import ViT, MAE
v = ViT(
image_size = 256,
patch_size = 32,
num_classes = 1000,
dim = 1024,
depth = 6,
heads = 8,
mlp_dim = 2048
)
mae = MAE(
encoder = v,
masking_ratio = 0.75, # the paper recommended 75% masked patches
decoder_dim = 512, # paper showed good results with just 512
decoder_depth = 6 # anywhere from 1 to 8
)
images = tf.random.normal([8, 256, 256, 3])
loss = mae(images)
# that's all!
# do the above in a for loop many times with a lot of images and your vision transformer will learn
```
## Masked Patch Prediction
Thanks to Zach, you can train using the original masked patch prediction task presented in the paper, with the following code.
```python
import tensorflow as tf
from vit_tensorflow import ViT
from vit_tensorflow.mpp import MPP
model = ViT(
image_size=256,
patch_size=32,
num_classes=1000,
dim=1024,
depth=6,
heads=8,
mlp_dim=2048,
dropout=0.1,
emb_dropout=0.1
)
mpp_trainer = MPP(
transformer=model,
patch_size=32,
dim=1024,
mask_prob=0.15, # probability of using token in masked prediction task
random_patch_prob=0.30, # probability of randomly replacing a token being used for mpp
replace_prob=0.50, # probability of replacing a token being used for mpp with the mask token
)
def sample_unlabelled_images():
return tf.random.normal([20, 256, 256, 3])
for _ in range(100):
with tf.GradientTape() as tape:
images = sample_unlabelled_images()
loss = mpp_trainer(images)
```
## Adaptive Token Sampling

This paper proposes to use the CLS attention scores, re-weighed by the norms of the value heads, as means to discard unimportant tokens at different layers.
```python
import tensorflow as tf
from vit_tensorflow.ats_vit import ViT
v = ViT(
image_size = 256,
patch_size = 16,
num_classes = 1000,
dim = 1024,
depth = 6,
max_tokens_per_depth = (256, 128, 64, 32, 16, 8), # a tuple that denotes the maximum number of tokens that any given layer should have. if the layer has greater than this amount, it will undergo adaptive token sampling
heads = 16,
mlp_dim = 2048,
dropout = 0.1,
emb_dropout = 0.1
)
img = tf.random.normal([4, 256, 256, 3])
preds = v(img) # (4, 1000)
# you can also get a list of the final sampled patch ids
# a value of -1 denotes padding
preds, token_ids = v(img, return_sampled_token_ids = True) # (4, 1000), (4, <=8)
```
## Patch Merger

This paper proposes a simple module (Patch Merger) for reducing the number of tokens at any layer of a vision transformer without sacrificing performance.
```python
import tensorflow as tf
from vit_tensorflow.vit_with_patch_merger import ViT
v = ViT(
image_size = 256,
patch_size = 16,
num_classes = 1000,
dim = 1024,
depth = 12,
heads = 8,
patch_merge_layer = 6, # at which transformer layer to do patch merging
patch_merge_num_tokens = 8, # the output number of tokens from the patch merge
mlp_dim = 2048,
dropout = 0.1,
emb_dropout = 0.1
)
img = tf.random.normal([4, 256, 256, 3])
preds = v(img) # (4, 1000)
```
One can also use the `PatchMerger` module by itself
```python
import tensorflow as tf
from vit_tensorflow.vit_with_patch_merger import PatchMerger
merger = PatchMerger(
dim = 1024,
num_tokens_out = 8 # output number of tokens
)
features = tf.random.normal([4, 256, 1024]) # (batch, num tokens, dimension)
out = merger(features) # (4, 8, 1024)
```
## Vision Transformer for Small Datasets

This paper proposes a new image to patch function that incorporates shifts of the image, before normalizing and dividing the image into patches. I have found shifting to be extremely helpful in some other transformers work, so decided to include this for further explorations. It also includes the `LSA` with the learned temperature and masking out of a token's attention to itself.
You can use as follows:
```python
import tensorflow as tf
from vit_tensorflow.vit_for_small_dataset import ViT
v = ViT(
image_size = 256,
patch_size = 16,
num_classes = 1000,
dim = 1024,
depth = 6,
heads = 16,
mlp_dim = 2048,
dropout = 0.1,
emb_dropout = 0.1
)
img = tf.random.normal([4, 256, 256, 3])
preds = v(img) # (1, 1000)
```
You can also use the `SPT` from this paper as a standalone module
```python
import tensorflow as tf
from vit_tensorflow.vit_for_small_dataset import SPT
spt = SPT(
dim = 1024,
patch_size = 16,
channels = 3
)
img = tf.random.normal([4, 256, 256, 3])
tokens = spt(img) # (4, 256, 1024)
```
## Parallel ViT

This paper propose parallelizing multiple attention and feedforward blocks per layer (2 blocks), claiming that it is easier to train without loss of performance.
You can try this variant as follows
```python
import tensorflow as tf
from vit_tensorflow.parallel_vit import ViT
v = ViT(
image_size = 256,
patch_size = 16,
num_classes = 1000,
dim = 1024,
depth = 6,
heads = 8,
mlp_dim = 2048,
num_parallel_branches = 2, # in paper, they claimed 2 was optimal
dropout = 0.1,
emb_dropout = 0.1
)
img = tf.random.normal([4, 256, 256, 3])
preds = v(img) # (4, 1000)
```
## FAQ
- How do I pass in non-square images?
You can already pass in non-square images - you just have to make sure your height and width is less than or equal to the `image_size`, and both divisible by the `patch_size`
ex.
```python
import tensorflow as tf
from vit_tensorflow import ViT
v = ViT(
image_size = 256,
patch_size = 32,
num_classes = 1000,
dim = 1024,
depth = 6,
heads = 16,
mlp_dim = 2048,
dropout = 0.1,
emb_dropout = 0.1
)
img = tf.random.normal([1, 256, 128, 3]) # <-- not a square
preds = v(img) # (1, 1000)
```
- How do I pass in non-square patches?
```python
import tensorflow as tf
from vit_tensorflow import ViT
v = ViT(
num_classes = 1000,
image_size = (256, 128), # image size is a tuple of (height, width)
patch_size = (32, 16), # patch size is a tuple of (height, width)
dim = 1024,
depth = 6,
heads = 16,
mlp_dim = 2048,
dropout = 0.1,
emb_dropout = 0.1
)
img = tf.random.normal([1, 256, 128, 3])
preds = v(img)
```
## Resources
Coming from computer vision and new to transformers? Here are some resources that greatly accelerated my learning.
1. Illustrated Transformer - Jay Alammar
2. Transformers from Scratch - Peter Bloem
3. The Annotated Transformer - Harvard NLP