https://github.com/thieu1995/mealpy
A Collection Of The State-of-the-art Metaheuristic Algorithms In Python (Metaheuristic/Optimizer/Nature-inspired/Biology)
https://github.com/thieu1995/mealpy
arithmetic-optimization-algorithm bio-inspired-optimization differential-evolution equilibrium-optimizer genetic-algorithm grey-wolf-optimizer harris-hawks-optimization harris-hawks-optimizationg henry-gas-solubility-optimization hunger-games-search location-optimization metaheuristics nature-inspired-algorithms particle-swarm-optimization production-planning schedule-optimization slime-mould-algorithm supply-chain-optimization swarm-intelligence whale-optimization
Last synced: about 1 year ago
JSON representation
A Collection Of The State-of-the-art Metaheuristic Algorithms In Python (Metaheuristic/Optimizer/Nature-inspired/Biology)
- Host: GitHub
- URL: https://github.com/thieu1995/mealpy
- Owner: thieu1995
- License: gpl-3.0
- Created: 2020-03-16T10:16:54.000Z (over 6 years ago)
- Default Branch: master
- Last Pushed: 2024-09-03T21:46:52.000Z (almost 2 years ago)
- Last Synced: 2025-04-12T00:52:36.953Z (over 1 year ago)
- Topics: arithmetic-optimization-algorithm, bio-inspired-optimization, differential-evolution, equilibrium-optimizer, genetic-algorithm, grey-wolf-optimizer, harris-hawks-optimization, harris-hawks-optimizationg, henry-gas-solubility-optimization, hunger-games-search, location-optimization, metaheuristics, nature-inspired-algorithms, particle-swarm-optimization, production-planning, schedule-optimization, slime-mould-algorithm, supply-chain-optimization, swarm-intelligence, whale-optimization
- Language: Python
- Homepage: https://mealpy.readthedocs.io
- Size: 15 MB
- Stars: 987
- Watchers: 15
- Forks: 201
- Open Issues: 20
-
Metadata Files:
- Readme: README.md
- Changelog: ChangeLog.md
- License: LICENSE
- Code of conduct: CODE_OF_CONDUCT.md
- Citation: CITATION.cff
Awesome Lists containing this project
README

---
[](https://github.com/thieu1995/mealpy/releases)
[](https://pypi.python.org/pypi/mealpy)
[](https://badge.fury.io/py/mealpy)



[](https://pepy.tech/project/mealpy)
[](https://github.com/thieu1995/mealpy/actions/workflows/publish-package.yaml)

[](https://mealpy.readthedocs.io/en/latest/?badge=latest)
[](https://t.me/+fRVCJGuGJg1mNDg1)
[](http://isitmaintained.com/project/thieu1995/mealpy "Average time to resolve an issue")
[](http://isitmaintained.com/project/thieu1995/mealpy "Percentage of issues still open")

[](https://git-scm.com/book/en/v2/GitHub-Contributing-to-a-Project)
[](https://doi.org/10.1016/j.sysarc.2023.102871)
[](https://www.gnu.org/licenses/gpl-3.0)
# Introduction
MEALPY is the largest python library in the world for most of the cutting-edge meta-heuristic algorithms
(nature-inspired algorithms, black-box optimization, global search optimizers, iterative learning algorithms,
continuous optimization, derivative free optimization, gradient free optimization, zeroth order optimization,
stochastic search optimization, random search optimization). These algorithms belong to population-based algorithms
(PMA), which are the most popular algorithms in the field of approximate optimization.
* **Free software:** GNU General Public License (GPL) V3 license
* **Total algorithms**: 215 (190 official (original, hybrid, variants), 25 developed)
* **Documentation:** https://mealpy.readthedocs.io/en/latest/
* **Python versions:** >=3.7x
* **Dependencies:** numpy, scipy, pandas, matplotlib

### Citation Request
Please include these citations if you plan to use this library:
```code
@article{van2023mealpy,
title={MEALPY: An open-source library for latest meta-heuristic algorithms in Python},
author={Van Thieu, Nguyen and Mirjalili, Seyedali},
journal={Journal of Systems Architecture},
year={2023},
publisher={Elsevier},
doi={10.1016/j.sysarc.2023.102871}
}
@article{van2023groundwater,
title={Groundwater level modeling using Augmented Artificial Ecosystem Optimization},
author={Van Thieu, Nguyen and Barma, Surajit Deb and Van Lam, To and Kisi, Ozgur and Mahesha, Amai},
journal={Journal of Hydrology},
volume={617},
pages={129034},
year={2023},
publisher={Elsevier},
doi={https://doi.org/10.1016/j.jhydrol.2022.129034}
}
@article{ahmed2021comprehensive,
title={A comprehensive comparison of recent developed meta-heuristic algorithms for streamflow time series forecasting problem},
author={Ahmed, Ali Najah and Van Lam, To and Hung, Nguyen Duy and Van Thieu, Nguyen and Kisi, Ozgur and El-Shafie, Ahmed},
journal={Applied Soft Computing},
volume={105},
pages={107282},
year={2021},
publisher={Elsevier},
doi={10.1016/j.asoc.2021.107282}
}
```
# Usage
Goals
Our goals are to implement all classical as well as the state-of-the-art nature-inspired algorithms, create a simple interface that helps researchers access optimization algorithms as quickly as possible, and share knowledge of the optimization field with everyone without a fee. What you can do with mealpy:
- Analyse parameters of meta-heuristic algorithms.
- Perform Qualitative and Quantitative Analysis of algorithms.
- Analyse rate of convergence of algorithms.
- Test and Analyse the scalability and the robustness of algorithms.
- Save results in various formats (csv, json, pickle, png, pdf, jpeg)
- Export and import models can also be done with Mealpy.
- **Solve any optimization problem**
Installation
* Install the stable (latest) version from [PyPI release](https://pypi.python.org/pypi/mealpy):
```sh
$ pip install mealpy==3.0.1
```
* Install the alpha/beta version from PyPi
```sh
$ pip install mealpy==2.5.4a6
```
* Install the pre-release version directly from the source code:
```sh
$ git clone https://github.com/thieu1995/mealpy.git
$ cd mealpy
$ python setup.py install
```
* In case, you want to install the development version from Github:
```sh
$ pip install git+https://github.com/thieu1995/permetrics
```
After installation, you can import Mealpy as any other Python module:
```sh
$ python
>>> import mealpy
>>> mealpy.__version__
>>> print(mealpy.get_all_optimizers())
>>> model = mealpy.get_optimizer_by_name("OriginalWOA")(epoch=100, pop_size=50)
```
## Examples
Before dive into some examples, let me ask you a question. What type of problem are you trying to solve?
Additionally, what would be the solution for your specific problem?
Based on the table below, you can select an appropriate type of decision variables to use.
| Class | Syntax | Problem Types |
|-----------------|--------------------------------------------------------------------------------------------------------------|-----------------------------|
| FloatVar | `FloatVar(lb=(-10., )*7, ub=(10., )*7, name="delta")` | Continuous Problem |
| IntegerVar | `IntegerVar(lb=(-10., )*7, ub=(10., )*7, name="delta")` | LP, IP, NLP, QP, MIP |
| StringVar | `StringVar(valid_sets=(("auto", "backward", "forward"), ("leaf", "branch", "root")), name="delta")` | ML, AI-optimize |
| BinaryVar | `BinaryVar(n_vars=11, name="delta")` | Networks |
| BoolVar | `BoolVar(n_vars=11, name="delta")` | ML, AI-optimize |
| PermutationVar | `PermutationVar(valid_set=(-10, -4, 10, 6, -2), name="delta")` | Combinatorial Optimization |
| MixedSetVar | `MixedSetVar(valid_sets=(("auto", 2, 3, "backward", True), (0, "tournament", "round-robin")), name="delta")` | MIP, MILP |
| TransferBoolVar | `TransferBoolVar(n_vars=11, name="delta", tf_func="sstf_02")` | ML, AI-optimize, Feature |
|TransferBinaryVar| `TransferBinaryVar(n_vars=11, name="delta", tf_func="vstf_04")` | Networks, Feature Selection |
Let's go through a basic and advanced example.
### Simple Benchmark Function
**Using Problem dict**
```python
from mealpy import FloatVar, SMA
import numpy as np
def objective_function(solution):
return np.sum(solution**2)
problem = {
"obj_func": objective_function,
"bounds": FloatVar(lb=(-100., )*30, ub=(100., )*30),
"minmax": "min",
"log_to": None,
}
## Run the algorithm
model = SMA.OriginalSMA(epoch=100, pop_size=50, pr=0.03)
g_best = model.solve(problem)
print(f"Best solution: {g_best.solution}, Best fitness: {g_best.target.fitness}")
```
**Define a custom Problem class**
**Please note that, there is no more `generate_position`, `amend_solution`, and `fitness_function` in Problem class.**
We take care everything under the DataType Class above. Just choose which one fit for your problem.
**We recommend you define a custom class that inherit `Problem` class if your decision variable is not FloatVar**
```python
from mealpy import Problem, FloatVar, BBO
import numpy as np
# Our custom problem class
class Squared(Problem):
def __init__(self, bounds=None, minmax="min", data=None, **kwargs):
self.data = data
super().__init__(bounds, minmax, **kwargs)
def obj_func(self, solution):
x = self.decode_solution(solution)["my_var"]
return np.sum(x ** 2)
## Now, we define an algorithm, and pass an instance of our *Squared* class as the problem argument.
bound = FloatVar(lb=(-10., )*20, ub=(10., )*20, name="my_var")
problem = Squared(bounds=bound, minmax="min", name="Squared", data="Amazing")
model = BBO.OriginalBBO(epoch=100, pop_size=20)
g_best = model.solve(problem)
```
### Set Seed for Optimizer (So many people asking for this feature)
You can set random seed number for each run of single optimizer.
```python
model = SMA.OriginalSMA(epoch=100, pop_size=50, pr=0.03)
g_best = model.solve(problem=problem, seed=10) # Default seed=None
```
### Large-Scale Optimization
```python
from mealpy import FloatVar, SHADE
import numpy as np
def objective_function(solution):
return np.sum(solution**2)
problem = {
"obj_func": objective_function,
"bounds": FloatVar(lb=(-1000., )*10000, ub=(1000.,)*10000), # 10000 dimensions
"minmax": "min",
"log_to": "console",
}
## Run the algorithm
optimizer = SHADE.OriginalSHADE(epoch=10000, pop_size=100)
g_best = optimizer.solve(problem)
print(f"Best solution: {g_best.solution}, Best fitness: {g_best.target.fitness}")
```
### Distributed Optimization / Parallelization Optimization
Please read the article titled [MEALPY: An open-source library for latest meta-heuristic algorithms in Python](https://doi.org/10.1016/j.sysarc.2023.102871) to
gain a clear understanding of the concept of parallelization (distributed
optimization) in metaheuristics. Not all metaheuristics can be run in parallel.
```python
from mealpy import FloatVar, SMA
import numpy as np
def objective_function(solution):
return np.sum(solution**2)
problem = {
"obj_func": objective_function,
"bounds": FloatVar(lb=(-100., )*100, ub=(100., )*100),
"minmax": "min",
"log_to": "console",
}
## Run distributed SMA algorithm using 10 threads
optimizer = SMA.OriginalSMA(epoch=10000, pop_size=100, pr=0.03)
optimizer.solve(problem, mode="thread", n_workers=10) # Distributed to 10 threads
print(f"Best solution: {optimizer.g_best.solution}, Best fitness: {optimizer.g_best.target.fitness}")
## Run distributed SMA algorithm using 8 CPUs (cores)
optimizer.solve(problem, mode="process", n_workers=8) # Distributed to 8 cores
print(f"Best solution: {optimizer.g_best.solution}, Best fitness: {optimizer.g_best.target.fitness}")
```
## The Benefit Of Using Custom Problem Class (BEST PRACTICE)
### Optimize Machine Learning model
In this example, we use SMA optimize to optimize the hyper-parameters of SVC model.
```python
from sklearn.svm import SVC
from sklearn.model_selection import train_test_split
from sklearn.preprocessing import StandardScaler
from sklearn import datasets, metrics
from mealpy import FloatVar, StringVar, IntegerVar, BoolVar, MixedSetVar, SMA, Problem
# Load the data set; In this example, the breast cancer dataset is loaded.
X, y = datasets.load_breast_cancer(return_X_y=True)
# Create training and test split
X_train, X_test, y_train, y_test = train_test_split(X, y, test_size=0.3, random_state=1, stratify=y)
sc = StandardScaler()
X_train_std = sc.fit_transform(X_train)
X_test_std = sc.transform(X_test)
data = {
"X_train": X_train_std,
"X_test": X_test_std,
"y_train": y_train,
"y_test": y_test
}
class SvmOptimizedProblem(Problem):
def __init__(self, bounds=None, minmax="max", data=None, **kwargs):
self.data = data
super().__init__(bounds, minmax, **kwargs)
def obj_func(self, x):
x_decoded = self.decode_solution(x)
C_paras, kernel_paras = x_decoded["C_paras"], x_decoded["kernel_paras"]
degree, gamma, probability = x_decoded["degree_paras"], x_decoded["gamma_paras"], x_decoded["probability_paras"]
svc = SVC(C=C_paras, kernel=kernel_paras, degree=degree,
gamma=gamma, probability=probability, random_state=1)
# Fit the model
svc.fit(self.data["X_train"], self.data["y_train"])
# Make the predictions
y_predict = svc.predict(self.data["X_test"])
# Measure the performance
return metrics.accuracy_score(self.data["y_test"], y_predict)
my_bounds = [
FloatVar(lb=0.01, ub=1000., name="C_paras"),
StringVar(valid_sets=('linear', 'poly', 'rbf', 'sigmoid'), name="kernel_paras"),
IntegerVar(lb=1, ub=5, name="degree_paras"),
MixedSetVar(valid_sets=('scale', 'auto', 0.01, 0.05, 0.1, 0.5, 1.0), name="gamma_paras"),
BoolVar(n_vars=1, name="probability_paras"),
]
problem = SvmOptimizedProblem(bounds=my_bounds, minmax="max", data=data)
model = SMA.OriginalSMA(epoch=100, pop_size=20)
model.solve(problem)
print(f"Best agent: {model.g_best}")
print(f"Best solution: {model.g_best.solution}")
print(f"Best accuracy: {model.g_best.target.fitness}")
print(f"Best parameters: {model.problem.decode_solution(model.g_best.solution)}")
```
### Solving Combinatorial Problems
**Traveling Salesman Problem (TSP)**
In the context of the Mealpy for the Traveling Salesman Problem (TSP), a solution is a possible route that
represents a tour of visiting all the cities exactly once and returning to the starting city. The solution is
typically represented as a permutation of the cities, where each city appears exactly once in the permutation.
For example, let's consider a TSP instance with 5 cities labeled as A, B, C, D, and E. A possible solution could be
represented as the permutation `[A, B, D, E, C]`, which indicates the order in which the cities are visited. This
solution suggests that the tour starts at city A, then moves to city B, then D, E, and finally C before returning to city A.
```python
import numpy as np
from mealpy import PermutationVar, WOA, Problem
# Define the positions of the cities
city_positions = np.array([[60, 200], [180, 200], [80, 180], [140, 180], [20, 160],
[100, 160], [200, 160], [140, 140], [40, 120], [100, 120],
[180, 100], [60, 80], [120, 80], [180, 60], [20, 40],
[100, 40], [200, 40], [20, 20], [60, 20], [160, 20]])
num_cities = len(city_positions)
data = {
"city_positions": city_positions,
"num_cities": num_cities,
}
class TspProblem(Problem):
def __init__(self, bounds=None, minmax="min", data=None, **kwargs):
self.data = data
super().__init__(bounds, minmax, **kwargs)
@staticmethod
def calculate_distance(city_a, city_b):
# Calculate Euclidean distance between two cities
return np.linalg.norm(city_a - city_b)
@staticmethod
def calculate_total_distance(route, city_positions):
# Calculate total distance of a route
total_distance = 0
num_cities = len(route)
for idx in range(num_cities):
current_city = route[idx]
next_city = route[(idx + 1) % num_cities] # Wrap around to the first city
total_distance += TspProblem.calculate_distance(city_positions[current_city], city_positions[next_city])
return total_distance
def obj_func(self, x):
x_decoded = self.decode_solution(x)
route = x_decoded["per_var"]
fitness = self.calculate_total_distance(route, self.data["city_positions"])
return fitness
bounds = PermutationVar(valid_set=list(range(0, num_cities)), name="per_var")
problem = TspProblem(bounds=bounds, minmax="min", data=data)
model = WOA.OriginalWOA(epoch=100, pop_size=20)
model.solve(problem)
print(f"Best agent: {model.g_best}") # Encoded solution
print(f"Best solution: {model.g_best.solution}") # Encoded solution
print(f"Best fitness: {model.g_best.target.fitness}")
print(f"Best real scheduling: {model.problem.decode_solution(model.g_best.solution)}") # Decoded (Real) solution
```
**Job Shop Scheduling Problem Using Woa Optimizer**
Note that this implementation assumes that the job times and machine times are provided as 2D lists, where
`job_times[i][j]` represents the processing time of job `i` on machine `j`.
Keep in mind that this is a simplified implementation, and you may need to modify it according to the specific
requirements and constraints of your Job Shop Scheduling problem.
```python
import numpy as np
from mealpy import PermutationVar, WOA, Problem
job_times = [[2, 1, 3], [4, 2, 1], [3, 3, 2]]
machine_times = [[3, 2, 1], [1, 4, 2], [2, 3, 2]]
n_jobs = len(job_times)
n_machines = len(machine_times)
data = {
"job_times": job_times,
"machine_times": machine_times,
"n_jobs": n_jobs,
"n_machines": n_machines
}
class JobShopProblem(Problem):
def __init__(self, bounds=None, minmax="min", data=None, **kwargs):
self.data = data
super().__init__(bounds, minmax, **kwargs)
def obj_func(self, x):
x_decoded = self.decode_solution(x)
x = x_decoded["per_var"]
makespan = np.zeros((self.data["n_jobs"], self.data["n_machines"]))
for gene in x:
job_idx = gene // self.data["n_machines"]
machine_idx = gene % self.data["n_machines"]
if job_idx == 0 and machine_idx == 0:
makespan[job_idx][machine_idx] = job_times[job_idx][machine_idx]
elif job_idx == 0:
makespan[job_idx][machine_idx] = makespan[job_idx][machine_idx - 1] + job_times[job_idx][machine_idx]
elif machine_idx == 0:
makespan[job_idx][machine_idx] = makespan[job_idx - 1][machine_idx] + job_times[job_idx][machine_idx]
else:
makespan[job_idx][machine_idx] = max(makespan[job_idx][machine_idx - 1], makespan[job_idx - 1][machine_idx]) + job_times[job_idx][machine_idx]
return np.max(makespan)
bounds = PermutationVar(valid_set=list(range(0, n_jobs*n_machines)), name="per_var")
problem = JobShopProblem(bounds=bounds, minmax="min", data=data)
model = WOA.OriginalWOA(epoch=100, pop_size=20)
model.solve(problem)
print(f"Best agent: {model.g_best}") # Encoded solution
print(f"Best solution: {model.g_best.solution}") # Encoded solution
print(f"Best fitness: {model.g_best.target.fitness}")
print(f"Best real scheduling: {model.problem.decode_solution(model.g_best.solution)}") # Decoded (Real) solution
```
**Shortest Path Problem**
In this example, the graph is represented as a NumPy array where each element represents the cost or distance between two nodes.
Note that this implementation assumes that the graph is represented by a symmetric matrix, where `graph[i,j]`
represents the distance between nodes `i` and `j`. If your graph representation is different, you may need to modify
the code accordingly.
Please keep in mind that this implementation is a basic example and may not be optimized for large-scale problems.
Further modifications and optimizations may be required depending on your specific use case.
```python
import numpy as np
from mealpy import PermutationVar, WOA, Problem
# Define the graph representation
graph = np.array([
[0, 2, 4, 0, 7, 9],
[2, 0, 1, 4, 2, 8],
[4, 1, 0, 1, 3, 0],
[6, 4, 5, 0, 3, 2],
[0, 2, 3, 3, 0, 2],
[9, 0, 4, 2, 2, 0]
])
class ShortestPathProblem(Problem):
def __init__(self, bounds=None, minmax="min", data=None, **kwargs):
self.data = data
self.eps = 1e10 # Penalty function for vertex with 0 connection
super().__init__(bounds, minmax, **kwargs)
# Calculate the fitness of an individual
def obj_func(self, x):
x_decoded = self.decode_solution(x)
individual = x_decoded["path"]
total_distance = 0
for idx in range(len(individual) - 1):
start_node = individual[idx]
end_node = individual[idx + 1]
weight = self.data[start_node, end_node]
if weight == 0:
return self.eps
total_distance += weight
return total_distance
num_nodes = len(graph)
bounds = PermutationVar(valid_set=list(range(0, num_nodes)), name="path")
problem = ShortestPathProblem(bounds=bounds, minmax="min", data=graph)
model = WOA.OriginalWOA(epoch=100, pop_size=20)
model.solve(problem)
print(f"Best agent: {model.g_best}") # Encoded solution
print(f"Best solution: {model.g_best.solution}") # Encoded solution
print(f"Best fitness: {model.g_best.target.fitness}")
print(f"Best real scheduling: {model.problem.decode_solution(model.g_best.solution)}") # Decoded (Real) solution
```
**Location Optimization**
Let's consider an example of location optimization in the context of a retail company that wants to open a certain
number of new stores in a region to maximize market coverage while minimizing operational costs.
A company wants to open five new stores in a region with several potential locations. The objective is to
determine the optimal locations for these stores while considering factors such as population density and
transportation costs. The goal is to maximize market coverage by locating stores in areas with high demand while
minimizing the overall transportation costs required to serve customers.
By applying location optimization techniques, the retail company can make informed decisions about where to open new
stores, considering factors such as population density and transportation costs. This approach allows the company to
maximize market coverage, make efficient use of resources, and ultimately improve customer service and profitability.
Note that this example is a simplified illustration, and in real-world scenarios, location optimization problems can
involve more complex constraints, additional factors, and larger datasets. However, the general process remains
similar, involving data analysis, mathematical modeling, and optimization techniques to determine the optimal
locations for facilities.
```python
import numpy as np
from mealpy import BinaryVar, WOA, Problem
# Define the coordinates of potential store locations
locations = np.array([
[2, 4],
[5, 6],
[9, 3],
[7, 8],
[1, 10],
[3, 2],
[5, 5],
[8, 2],
[7, 6],
[1, 9]
])
# Define the transportation costs matrix based on the Euclidean distance between locations
distance_matrix = np.linalg.norm(locations[:, np.newaxis] - locations, axis=2)
# Define the number of stores to open
num_stores = 5
# Define the maximum distance a customer should travel to reach a store
max_distance = 10
data = {
"num_stores": num_stores,
"max_distance": max_distance,
"penalty": 1e10
}
class LocationOptProblem(Problem):
def __init__(self, bounds=None, minmax=None, data=None, **kwargs):
self.data = data
self.eps = 1e10
super().__init__(bounds, minmax, **kwargs)
# Define the fitness evaluation function
def obj_func(self, x):
x_decoded = self.decode_solution(x)
x = x_decoded["placement_var"]
total_coverage = np.sum(x)
total_dist = np.sum(x[:, np.newaxis] * distance_matrix)
if total_dist == 0: # Penalize solutions with fewer stores
return self.eps
if total_coverage < self.data["num_stores"]: # Penalize solutions with fewer stores
return self.eps
return total_dist
bounds = BinaryVar(n_vars=len(locations), name="placement_var")
problem = LocationOptProblem(bounds=bounds, minmax="min", data=data)
model = WOA.OriginalWOA(epoch=50, pop_size=20)
model.solve(problem)
print(f"Best agent: {model.g_best}") # Encoded solution
print(f"Best solution: {model.g_best.solution}") # Encoded solution
print(f"Best fitness: {model.g_best.target.fitness}")
print(f"Best real scheduling: {model.problem.decode_solution(model.g_best.solution)}") # Decoded (Real) solution
```
**Supply Chain Optimization**
Let's assume we have a supply chain network with 5 distribution centers (DC1, DC2, DC3, DC4, DC5) and 10 products
(P1, P2, P3, ..., P10). Our goal is to determine the optimal allocation of products to the distribution centers in
a way that minimizes the total transportation cost.
Each solution represents an allocation of products to distribution centers. We can use a binary matrix with
dimensions `(10, 5)` where each element `(i, j)` represents whether product `i` is allocated to distribution center `j`.
For example, a chromosome `[1, 0, 1, 0, 1]` would mean that product `1` is allocated to `DC1`, `DC3`, `DC5`.
We can add the maximum capacity of each distribution center, therefor we need penalty term to the fitness
evaluation function to penalize solutions that violate this constraint. The penalty can be based on the degree of
violation or a fixed penalty value.
```python
import numpy as np
from mealpy import BinaryVar, WOA, Problem
# Define the problem parameters
num_products = 10
num_distribution_centers = 5
# Define the transportation cost matrix (randomly generated for the example)
transportation_cost = np.random.randint(1, 10, size=(num_products, num_distribution_centers))
data = {
"num_products": num_products,
"num_distribution_centers": num_distribution_centers,
"transportation_cost": transportation_cost,
"max_capacity": 4, # Maximum capacity of each distribution center
"penalty": 1e10 # Define a penalty value for maximum capacity of each distribution center
}
class SupplyChainProblem(Problem):
def __init__(self, bounds=None, minmax=None, data=None, **kwargs):
self.data = data
super().__init__(bounds, minmax, **kwargs)
def obj_func(self, x):
x_decoded = self.decode_solution(x)
x = x_decoded["placement_var"].reshape((self.data["num_products"], self.data["num_distribution_centers"]))
if np.any(np.all(x==0, axis=1)):
# If any row has all 0 value, it indicates that this product is not allocated to any distribution center.
return 0
total_cost = np.sum(self.data["transportation_cost"] * x)
# Penalty for violating maximum capacity constraint
excess_capacity = np.maximum(np.sum(x, axis=0) - self.data["max_capacity"], 0)
penalty = np.sum(excess_capacity)
# Calculate fitness value as the inverse of the total cost plus the penalty
fitness = 1 / (total_cost + penalty)
return fitness
bounds = BinaryVar(n_vars=num_products * num_distribution_centers, name="placement_var")
problem = SupplyChainProblem(bounds=bounds, minmax="max", data=data)
model = WOA.OriginalWOA(epoch=50, pop_size=20)
model.solve(problem)
print(f"Best agent: {model.g_best}") # Encoded solution
print(f"Best solution: {model.g_best.solution}") # Encoded solution
print(f"Best fitness: {model.g_best.target.fitness}")
print(f"Best real scheduling: {model.problem.decode_solution(model.g_best.solution)['placement_var'].reshape((num_products, num_distribution_centers))}")
```
**Healthcare Workflow Optimization Problem**
Define a chromosome representation that encodes the allocation of resources and patient flow in the emergency
department. This could be a binary matrix where each row represents a patient and each column represents a resource
(room). If the element is 1, it means the patient is assigned to that particular room, and if the element is 0, it
means the patient is not assigned to that room
Please note that this implementation is a basic template and may require further customization based on the specific
objectives, constraints, and evaluation criteria of your healthcare workflow optimization problem. You'll need to
define the specific fitness function and optimization objectives based on the factors you want to optimize, such as
patient waiting times, resource utilization, and other relevant metrics in the healthcare workflow context.
```python
import numpy as np
from mealpy import BinaryVar, WOA, Problem
# Define the problem parameters
num_patients = 50 # Number of patients
num_resources = 10 # Number of resources (room)
# Define the patient waiting time matrix (randomly generated for the example)
# Why? May be, doctors need time to prepare tools,...
waiting_matrix = np.random.randint(1, 10, size=(num_patients, num_resources))
data = {
"num_patients": num_patients,
"num_resources": num_resources,
"waiting_matrix": waiting_matrix,
"max_resource_capacity": 10, # Maximum capacity of each room
"max_waiting_time": 60, # Maximum waiting time
"penalty_value": 1e2, # Define a penalty value
"penalty_patient": 1e10
}
class SupplyChainProblem(Problem):
def __init__(self, bounds=None, minmax=None, data=None, **kwargs):
self.data = data
super().__init__(bounds, minmax, **kwargs)
def obj_func(self, x):
x_decoded = self.decode_solution(x)
x = x_decoded["placement_var"].reshape(self.data["num_patients"], self.data["num_resources"])
# If any row has all 0 value, it indicates that this patient is not allocated to any room.
# If a patient a assigned to more than 3 room, not allow
if np.any(np.all(x==0, axis=1)) or np.any(np.sum(x>3, axis=1)):
return self.data["penalty_patient"]
# Calculate fitness based on optimization objectives
room_used = np.sum(x, axis=0)
wait_time = np.sum(x * self.data["waiting_matrix"], axis=1)
violated_constraints = np.sum(room_used > self.data["max_resource_capacity"]) + np.sum(wait_time > self.data["max_waiting_time"])
# Calculate the fitness value based on the objectives
resource_utilization_fitness = 1 - np.mean(room_used) / self.data["max_resource_capacity"]
waiting_time_fitness = 1 - np.mean(wait_time) / self.data["max_waiting_time"]
fitness = resource_utilization_fitness + waiting_time_fitness + self.data['penalty_value'] * violated_constraints
return fitness
bounds = BinaryVar(n_vars=num_patients * num_resources, name="placement_var")
problem = SupplyChainProblem(bounds=bounds, minmax="min", data=data)
model = WOA.OriginalWOA(epoch=50, pop_size=20)
model.solve(problem)
print(f"Best agent: {model.g_best}") # Encoded solution
print(f"Best solution: {model.g_best.solution}") # Encoded solution
print(f"Best fitness: {model.g_best.target.fitness}")
print(f"Best real scheduling: {model.problem.decode_solution(model.g_best.solution)['placement_var'].reshape((num_patients, num_resources))}")
```
**Production Optimization Problem**
Let's consider a simplified example of production optimization in the context of a manufacturing company that
produces electronic devices, such as smartphones. The objective is to maximize production output while minimizing
production costs.
This example uses binary representations for production configurations, assuming each task can be assigned to a
resource (1) or not (0). You may need to adapt the representation and operators to suit your specific production
optimization problem.
```python
import numpy as np
from mealpy import BinaryVar, WOA, Problem
# Define the problem parameters
num_tasks = 10
num_resources = 5
# Example task processing times
task_processing_times = np.array([2, 3, 4, 2, 3, 2, 3, 4, 2, 3])
# Example resource capacity
resource_capacity = np.array([10, 8, 6, 12, 15])
# Example production costs and outputs
production_costs = np.array([5, 6, 4, 7, 8, 9, 5, 6, 7, 8])
production_outputs = np.array([20, 18, 16, 22, 25, 24, 20, 18, 19, 21])
# Example maximum total production time
max_total_time = 50
# Example maximum defect rate
max_defect_rate = 0.2
# Penalty for invalid solution
penalty = -1000
data = {
"num_tasks": num_tasks,
"num_resources": num_resources,
"task_processing_times": task_processing_times,
"resource_capacity": resource_capacity,
"production_costs": production_costs,
"production_outputs": production_outputs,
"max_defect_rate": max_defect_rate,
"penalty": penalty
}
class SupplyChainProblem(Problem):
def __init__(self, bounds=None, minmax=None, data=None, **kwargs):
self.data = data
super().__init__(bounds, minmax, **kwargs)
def obj_func(self, x):
x_decoded = self.decode_solution(x)
x = x_decoded["placement_var"].reshape((self.data["num_tasks"], self.data["num_resources"]))
# If any row has all 0 value, it indicates that this task is not allocated to any resource
if np.any(np.all(x==0, axis=1)) or np.any(np.all(x==0, axis=0)):
return self.data["penalty"]
# Check violated constraints
violated_constraints = 0
# Calculate resource utilization
resource_utilization = np.sum(x, axis=0)
# Resource capacity constraint
if np.any(resource_utilization > self.data["resource_capacity"]):
violated_constraints += 1
# Time constraint
total_time = np.sum(np.dot(self.data["task_processing_times"].reshape(1, -1), x))
if total_time > max_total_time:
violated_constraints += 1
# Quality constraint
defect_rate = np.dot(self.data["production_costs"].reshape(1, -1), x) / np.dot(self.data["production_outputs"], x)
if np.any(defect_rate > max_defect_rate):
violated_constraints += 1
# Calculate the fitness value based on the objectives and constraints
profit = np.sum(np.dot(self.data["production_outputs"].reshape(1, -1), x)) - np.sum(np.dot(self.data["production_costs"].reshape(1, -1), x))
if violated_constraints > 0:
return profit + self.data["penalty"] * violated_constraints # Penalize solutions with violated constraints
return profit
bounds = BinaryVar(n_vars=num_tasks * num_resources, name="placement_var")
problem = SupplyChainProblem(bounds=bounds, minmax="max", data=data)
model = WOA.OriginalWOA(epoch=50, pop_size=20)
model.solve(problem)
print(f"Best agent: {model.g_best}") # Encoded solution
print(f"Best solution: {model.g_best.solution}") # Encoded solution
print(f"Best fitness: {model.g_best.target.fitness}")
print(f"Best real scheduling: {model.problem.decode_solution(model.g_best.solution)['placement_var'].reshape((num_tasks, num_resources))}")
```
**Employee Rostering Problem Using Woa Optimizer**
The goal is to create an optimal schedule that assigns employees to shifts while satisfying various
constraints and objectives. Note that this implementation assumes that shift_requirements array
has dimensions (num_employees, num_shifts), and shift_costs is a 1D array of length num_shifts.
Please keep in mind that this is a simplified implementation, and you may need to modify it according to the
specific requirements and constraints of your employee rostering problem. Additionally, you might want to
introduce additional mechanisms or constraints such as fairness, employee preferences, or shift
dependencies to enhance the model's effectiveness in real-world scenarios.
For example, if you have 5 employees and 3 shifts, a chromosome could be represented as [2, 1, 0, 2, 0],
where employee 0 is assigned to shift 2, employee 1 is assigned to shift 1,
employee 2 is assigned to shift 0, and so on.
```python
import numpy as np
from mealpy import IntegerVar, WOA, Problem
shift_requirements = np.array([[2, 1, 3], [4, 2, 1], [3, 3, 2]])
shift_costs = np.array([10, 8, 12])
num_employees = shift_requirements.shape[0]
num_shifts = shift_requirements.shape[1]
data = {
"shift_requirements": shift_requirements,
"shift_costs": shift_costs,
"num_employees": num_employees,
"num_shifts": num_shifts
}
class EmployeeRosteringProblem(Problem):
def __init__(self, bounds=None, minmax="min", data=None, **kwargs):
self.data = data
super().__init__(bounds, minmax, **kwargs)
def obj_func(self, x):
x_decoded = self.decode_solution(x)
x = x_decoded["shift_var"]
shifts_covered = np.zeros(self.data["num_shifts"])
total_cost = 0
for idx in range(self.data["num_employees"]):
shift_idx = x[idx]
shifts_covered[shift_idx] += 1
total_cost += self.data["shift_costs"][shift_idx]
coverage_diff = self.data["shift_requirements"] - shifts_covered
coverage_penalty = np.sum(np.abs(coverage_diff))
return total_cost + coverage_penalty
bounds = IntegerVar(lb=[0, ]*num_employees, ub=[num_shifts-1, ]*num_employees, name="shift_var")
problem = EmployeeRosteringProblem(bounds=bounds, minmax="min", data=data)
model = WOA.OriginalWOA(epoch=50, pop_size=20)
model.solve(problem)
print(f"Best agent: {model.g_best}") # Encoded solution
print(f"Best solution: {model.g_best.solution}") # Encoded solution
print(f"Best fitness: {model.g_best.target.fitness}")
print(f"Best real scheduling: {model.problem.decode_solution(model.g_best.solution)}") # Decoded (Real) solution
```
**Maintenance Scheduling**
In maintenance scheduling, the goal is to optimize the schedule for performing maintenance tasks on
various assets or equipment. The objective is to minimize downtime and maximize the utilization of
assets while considering various constraints such as resource availability, task dependencies, and time constraints.
Each element in the solution represents whether a task is assigned to an asset (1) or not (0). The schedule
specifies when each task should start and which asset it is assigned to, aiming to minimize the total downtime.
By using the Mealpy, you can find an efficient maintenance schedule that minimizes downtime,
maximizes asset utilization, and satisfies various constraints, ultimately optimizing
the maintenance operations for improved reliability and productivity.
```python
import numpy as np
from mealpy import BinaryVar, WOA, Problem
num_tasks = 10
num_assets = 5
task_durations = np.random.randint(1, 10, size=(num_tasks, num_assets))
data = {
"num_tasks": num_tasks,
"num_assets": num_assets,
"task_durations": task_durations,
"unassigned_penalty": -100 # Define a penalty value for no task is assigned to asset
}
class MaintenanceSchedulingProblem(Problem):
def __init__(self, bounds=None, minmax=None, data=None, **kwargs):
self.data = data
super().__init__(bounds, minmax, **kwargs)
def obj_func(self, x):
x_decoded = self.decode_solution(x)
x = x_decoded["task_var"]
downtime = -np.sum(x.reshape((self.data["num_tasks"], self.data["num_assets"])) * self.data["task_durations"])
if np.sum(x) == 0:
downtime += self.data["unassigned_penalty"]
return downtime
bounds = BinaryVar(n_vars=num_tasks * num_assets, name="task_var")
problem = MaintenanceSchedulingProblem(bounds=bounds, minmax="max", data=data)
model = WOA.OriginalWOA(epoch=50, pop_size=20)
model.solve(problem)
print(f"Best agent: {model.g_best}") # Encoded solution
print(f"Best solution: {model.g_best.solution}") # Encoded solution
print(f"Best fitness: {model.g_best.target.fitness}")
print(f"Best real scheduling: {model.problem.decode_solution(model.g_best.solution).reshape((num_tasks, num_assets))}") # Decoded (Real) solution
```
Constrained Benchmark Function
```python
from mealpy import FloatVar, SMA
import numpy as np
## Link: https://onlinelibrary.wiley.com/doi/pdf/10.1002/9781119136507.app2
def objective_function(solution):
def g1(x):
return 2*x[0] + 2*x[1] + x[9] + x[10] - 10
def g2(x):
return 2 * x[0] + 2 * x[2] + x[9] + x[10] - 10
def g3(x):
return 2 * x[1] + 2 * x[2] + x[10] + x[11] - 10
def g4(x):
return -8*x[0] + x[9]
def g5(x):
return -8*x[1] + x[10]
def g6(x):
return -8*x[2] + x[11]
def g7(x):
return -2*x[3] - x[4] + x[9]
def g8(x):
return -2*x[5] - x[6] + x[10]
def g9(x):
return -2*x[7] - x[8] + x[11]
def violate(value):
return 0 if value <= 0 else value
fx = 5 * np.sum(solution[:4]) - 5*np.sum(solution[:4]**2) - np.sum(solution[4:13])
## Increase the punishment for g1 and g4 to boost the algorithm (You can choice any constraint instead of g1 and g4)
fx += violate(g1(solution))**2 + violate(g2(solution)) + violate(g3(solution)) + \
2*violate(g4(solution)) + violate(g5(solution)) + violate(g6(solution))+ \
violate(g7(solution)) + violate(g8(solution)) + violate(g9(solution))
return fx
problem = {
"obj_func": objective_function,
"bounds": FloatVar(lb=[0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0], ub=[1, 1, 1, 1, 1, 1, 1, 1, 1, 100, 100, 100, 1]),
"minmax": "min",
}
## Run the algorithm
optimizer = SMA.OriginalSMA(epoch=100, pop_size=50, pr=0.03)
optimizer.solve(problem)
print(f"Best solution: {optimizer.g_best.solution}, Best fitness: {optimizer.g_best.target.fitness}")
```
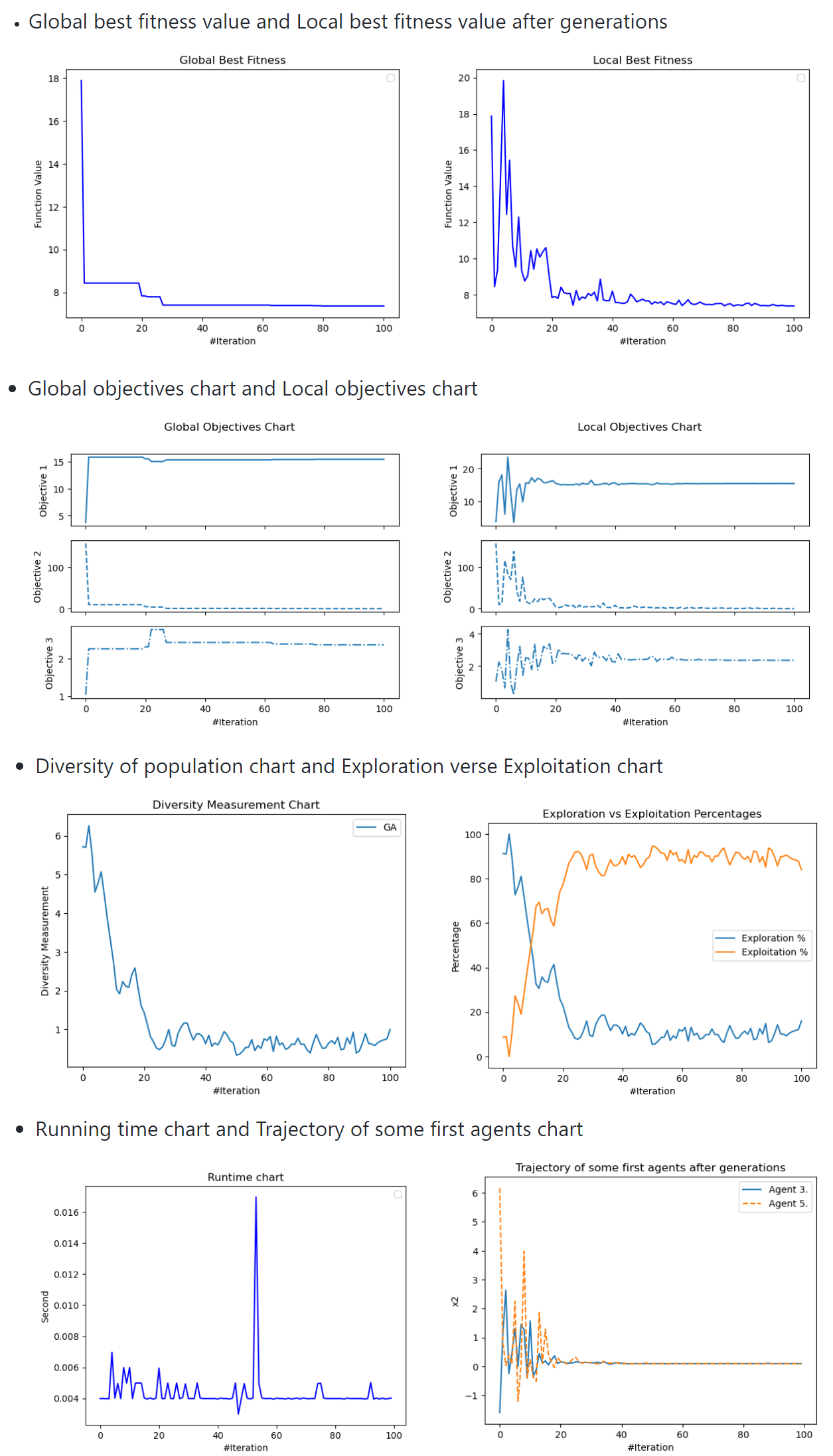
Multi-objective Benchmark Function
```python
from mealpy import FloatVar, SMA
import numpy as np
## Link: https://en.wikipedia.org/wiki/Test_functions_for_optimization
def objective_function(solution):
def booth(x, y):
return (x + 2*y - 7)**2 + (2*x + y - 5)**2
def bukin(x, y):
return 100 * np.sqrt(np.abs(y - 0.01 * x**2)) + 0.01 * np.abs(x + 10)
def matyas(x, y):
return 0.26 * (x**2 + y**2) - 0.48 * x * y
return [booth(solution[0], solution[1]), bukin(solution[0], solution[1]), matyas(solution[0], solution[1])]
problem = {
"obj_func": objective_function,
"bounds": FloatVar(lb=(-10, -10), ub=(10, 10)),
"minmax": "min",
"obj_weights": [0.4, 0.1, 0.5] # Define it or default value will be [1, 1, 1]
}
## Run the algorithm
optimizer = SMA.OriginalSMA(epoch=100, pop_size=50, pr=0.03)
optimizer.solve(problem)
print(f"Best solution: {optimizer.g_best.solution}, Best fitness: {optimizer.g_best.target.fitness}")
## You can access all of available figures via object "history" like this:
optimizer.history.save_global_objectives_chart(filename="hello/goc")
optimizer.history.save_local_objectives_chart(filename="hello/loc")
optimizer.history.save_global_best_fitness_chart(filename="hello/gbfc")
optimizer.history.save_local_best_fitness_chart(filename="hello/lbfc")
optimizer.history.save_runtime_chart(filename="hello/rtc")
optimizer.history.save_exploration_exploitation_chart(filename="hello/eec")
optimizer.history.save_diversity_chart(filename="hello/dc")
optimizer.history.save_trajectory_chart(list_agent_idx=[3, 5], selected_dimensions=[2], filename="hello/tc")
```
Custom Problem
For our custom problem, we can create a class and inherit from the `Problem` class, named the child class the
'Squared' class. In the initialization method of the 'Squared' class, we have to set the `bounds`, and `minmax`
of the problem (bounds: a problem's type, and minmax: a string specifying whether the problem is a 'min' or 'max' problem).
Afterwards, we have to override the abstract method `obj_func()`, which takes a parameter 'solution' (the solution
to be evaluated) and returns the function value. The resulting code should look something like the code snippet
below. 'Name' is an additional parameter we want to include in this class, and you can include any other additional
parameters you need. But remember to set up all additional parameters before super() called.
```python
from mealpy import Problem, FloatVar, BBO
import numpy as np
# Our custom problem class
class Squared(Problem):
def __init__(self, bounds=None, minmax="min", data=None, **kwargs):
self.data = data
super().__init__(bounds, minmax, **kwargs)
def obj_func(self, solution):
return np.sum(solution ** 2)
## Now, we define an algorithm, and pass an instance of our *Squared* class as the problem argument.
problem = Squared(bounds=FloatVar(lb=(-10., )*20, ub=(10., )*20), minmax="min", name="Squared", data="Amazing")
model = BBO.OriginalBBO(epoch=10, pop_size=50)
g_best = model.solve(problem)
## Show some attributes
print(g_best.solution)
print(g_best.target.fitness)
print(g_best.target.objectives)
print(g_best)
print(model.get_parameters())
print(model.get_name())
print(model.get_attributes()["g_best"])
print(model.problem.get_name())
print(model.problem.n_dims)
print(model.problem.bounds)
print(model.problem.lb)
print(model.problem.ub)
```
Tuner class (GridSearchCV/ParameterSearch, Hyper-parameter tuning)
We build a dedicated class, Tuner, that can help you tune your algorithm's parameters.
```python
from opfunu.cec_based.cec2017 import F52017
from mealpy import FloatVar, BBO, Tuner
## You can define your own problem, here I took the F5 benchmark function in CEC-2017 as an example.
f1 = F52017(30, f_bias=0)
p1 = {
"bounds": FloatVar(lb=f1.lb, ub=f1.ub),
"obj_func": f1.evaluate,
"minmax": "min",
"name": "F5",
"log_to": "console",
}
paras_bbo_grid = {
"epoch": [10, 20, 30, 40],
"pop_size": [50, 100, 150],
"n_elites": [2, 3, 4, 5],
"p_m": [0.01, 0.02, 0.05]
}
term = {
"max_epoch": 200,
"max_time": 20,
"max_fe": 10000
}
if __name__ == "__main__":
model = BBO.OriginalBBO()
tuner = Tuner(model, paras_bbo_grid)
tuner.execute(problem=p1, termination=term, n_trials=5, n_jobs=4, mode="thread", n_workers=4, verbose=True)
## Solve this problem 5 times (n_trials) using 5 processes (n_jobs), each process will handle 1 trial.
## The mode to run the solver is thread (mode), distributed to 4 threads
print(tuner.best_row)
print(tuner.best_score)
print(tuner.best_params)
print(type(tuner.best_params))
print(tuner.best_algorithm)
## Save results to csv file
tuner.export_results(save_path="history", file_name="tuning_best_fit.csv")
tuner.export_figures()
## Re-solve the best model on your problem
g_best = tuner.resolve(mode="thread", n_workers=4, termination=term)
print(g_best.solution, g_best.target.fitness)
print(tuner.algorithm.problem.get_name())
print(tuner.best_algorithm.get_name())
```
Multitask class (Multitask solver)
We also build a dedicated class, Multitask, that can help you run several scenarios. For example:
1. Run 1 algorithm with 1 problem, and multiple trials
2. Run 1 algorithm with multiple problems, and multiple trials
3. Run multiple algorithms with 1 problem, and multiple trials
4. Run multiple algorithms with multiple problems, and multiple trials
```python
#### Using multiple algorithm to solve multiple problems with multiple trials
## Import libraries
from opfunu.cec_based.cec2017 import F52017, F102017, F292017
from mealpy import FloatVar
from mealpy import BBO, DE
from mealpy import Multitask
## Define your own problems
f1 = F52017(30, f_bias=0)
f2 = F102017(30, f_bias=0)
f3 = F292017(30, f_bias=0)
p1 = {
"bounds": FloatVar(lb=f1.lb, ub=f1.ub),
"obj_func": f1.evaluate,
"minmax": "min",
"name": "F5",
"log_to": "console",
}
p2 = {
"bounds": FloatVar(lb=f2.lb, ub=f2.ub),
"obj_func": f2.evaluate,
"minmax": "min",
"name": "F10",
"log_to": "console",
}
p3 = {
"bounds": FloatVar(lb=f3.lb, ub=f3.ub),
"obj_func": f3.evaluate,
"minmax": "min",
"name": "F29",
"log_to": "console",
}
## Define models
model1 = BBO.DevBBO(epoch=10000, pop_size=50)
model2 = BBO.OriginalBBO(epoch=10000, pop_size=50)
model3 = DE.OriginalDE(epoch=10000, pop_size=50)
model4 = DE.SAP_DE(epoch=10000, pop_size=50)
## Define termination if needed
term = {
"max_fe": 3000
}
## Define and run Multitask
if __name__ == "__main__":
multitask = Multitask(algorithms=(model1, model2, model3, model4), problems=(p1, p2, p3), terminations=(term, ), modes=("thread", ), n_workers=4)
# default modes = "single", default termination = epoch (as defined in problem dictionary)
multitask.execute(n_trials=5, n_jobs=None, save_path="history", save_as="csv", save_convergence=True, verbose=False)
# multitask.execute(n_trials=5, save_path="history", save_as="csv", save_convergence=True, verbose=False)
## Check the directory: history/, you will see list of .csv result files
```
For more usage examples please look at [examples](/examples) folder.
More advanced examples can also be found in the [Mealpy-examples repository](https://github.com/thieu1995/mealpy_examples).
Get Visualize Figures
* [Tutorials](/examples/utils/visualize/all_charts.py)
All Optimizers
```python
import numpy as np
from opfunu.cec_based.cec2017 import F292017
from mealpy import BBO, PSO, GA, ALO, AO, ARO, AVOA, BA, BBOA, BMO, EOA, IWO
from mealpy import FloatVar
from mealpy import GJO, FOX, FOA, FFO, FFA, FA, ESOA, EHO, DO, DMOA, CSO, CSA, CoatiOA, COA, BSA
from mealpy import HCO, ICA, LCO, WarSO, TOA, TLO, SSDO, SPBO, SARO, QSA, ArchOA, ASO, CDO, EFO, EO, EVO, FLA
from mealpy import HGSO, MVO, NRO, RIME, SA, WDO, TWO, ABC, ACOR, AGTO, BeesA, BES, BFO, ZOA, WOA, WaOA, TSO
from mealpy import PFA, OOA, NGO, NMRA, MSA, MRFO, MPA, MGO, MFO, JA, HHO, HGS, HBA, GWO, GTO, GOA
from mealpy import Problem
from mealpy import SBO, SMA, SOA, SOS, TPO, TSA, VCS, WHO, AOA, CEM, CGO, CircleSA, GBO, HC, INFO, PSS, RUN, SCA
from mealpy import SHIO, TS, HS, AEO, GCO, WCA, CRO, DE, EP, ES, FPA, MA, SHADE, BRO, BSO, CA, CHIO, FBIO, GSKA, HBO
from mealpy import TDO, STO, SSpiderO, SSpiderA, SSO, SSA, SRSR, SLO, SHO, SFO, ServalOA, SeaHO, SCSO, POA
from mealpy import (StringVar, FloatVar, BoolVar, PermutationVar, MixedSetVar, IntegerVar, BinaryVar,
TransferBinaryVar, TransferBoolVar)
from mealpy import Tuner, Multitask, Problem, Optimizer, Termination, ParameterGrid
from mealpy import get_all_optimizers, get_optimizer_by_name
if __name__ == "__main__":
model = BBO.OriginalBBO(epoch=10, pop_size=30, p_m=0.01, n_elites=2)
model = PSO.OriginalPSO(epoch=100, pop_size=50, c1=2.05, c2=20.5, w=0.4)
model = PSO.LDW_PSO(epoch=100, pop_size=50, c1=2.05, c2=20.5, w_min=0.4, w_max=0.9)
model = PSO.AIW_PSO(epoch=100, pop_size=50, c1=2.05, c2=20.5, alpha=0.4)
model = PSO.P_PSO(epoch=100, pop_size=50)
model = PSO.HPSO_TVAC(epoch=100, pop_size=50, ci=0.5, cf=0.1)
model = PSO.C_PSO(epoch=100, pop_size=50, c1=2.05, c2=2.05, w_min=0.4, w_max=0.9)
model = PSO.CL_PSO(epoch=100, pop_size=50, c_local=1.2, w_min=0.4, w_max=0.9, max_flag=7)
model = GA.BaseGA(epoch=100, pop_size=50, pc=0.9, pm=0.05, selection="tournament", k_way=0.4, crossover="multi_points", mutation="swap")
model = GA.SingleGA(epoch=100, pop_size=50, pc=0.9, pm=0.8, selection="tournament", k_way=0.4, crossover="multi_points", mutation="swap")
model = GA.MultiGA(epoch=100, pop_size=50, pc=0.9, pm=0.8, selection="tournament", k_way=0.4, crossover="multi_points", mutation="swap")
model = GA.EliteSingleGA(epoch=100, pop_size=50, pc=0.95, pm=0.8, selection="roulette", crossover="uniform", mutation="swap", k_way=0.2, elite_best=0.1,
elite_worst=0.3, strategy=0)
model = GA.EliteMultiGA(epoch=100, pop_size=50, pc=0.95, pm=0.8, selection="roulette", crossover="uniform", mutation="swap", k_way=0.2, elite_best=0.1,
elite_worst=0.3, strategy=0)
model = ABC.OriginalABC(epoch=1000, pop_size=50, n_limits=50)
model = ACOR.OriginalACOR(epoch=1000, pop_size=50, sample_count=25, intent_factor=0.5, zeta=1.0)
model = AGTO.OriginalAGTO(epoch=1000, pop_size=50, p1=0.03, p2=0.8, beta=3.0)
model = AGTO.MGTO(epoch=1000, pop_size=50, pp=0.03)
model = ALO.OriginalALO(epoch=100, pop_size=50)
model = ALO.DevALO(epoch=100, pop_size=50)
model = AO.OriginalAO(epoch=100, pop_size=50)
model = ARO.OriginalARO(epoch=100, pop_size=50)
model = ARO.LARO(epoch=100, pop_size=50)
model = ARO.IARO(epoch=100, pop_size=50)
model = AVOA.OriginalAVOA(epoch=100, pop_size=50, p1=0.6, p2=0.4, p3=0.6, alpha=0.8, gama=2.5)
model = BA.OriginalBA(epoch=100, pop_size=50, loudness=0.8, pulse_rate=0.95, pf_min=0.1, pf_max=10.0)
model = BA.AdaptiveBA(epoch=100, pop_size=50, loudness_min=1.0, loudness_max=2.0, pr_min=-2.5, pr_max=0.85, pf_min=0.1, pf_max=10.)
model = BA.DevBA(epoch=100, pop_size=50, pulse_rate=0.95, pf_min=0., pf_max=10.)
model = BBOA.OriginalBBOA(epoch=100, pop_size=50)
model = BMO.OriginalBMO(epoch=100, pop_size=50, pl=4)
model = EOA.OriginalEOA(epoch=100, pop_size=50, p_c=0.9, p_m=0.01, n_best=2, alpha=0.98, beta=0.9, gama=0.9)
model = IWO.OriginalIWO(epoch=100, pop_size=50, seed_min=3, seed_max=9, exponent=3, sigma_start=0.6, sigma_end=0.01)
model = SBO.DevSBO(epoch=100, pop_size=50, alpha=0.9, p_m=0.05, psw=0.02)
model = SBO.OriginalSBO(epoch=100, pop_size=50, alpha=0.9, p_m=0.05, psw=0.02)
model = SMA.OriginalSMA(epoch=100, pop_size=50, p_t=0.03)
model = SMA.DevSMA(epoch=100, pop_size=50, p_t=0.03)
model = SOA.OriginalSOA(epoch=100, pop_size=50, fc=2)
model = SOA.DevSOA(epoch=100, pop_size=50, fc=2)
model = SOS.OriginalSOS(epoch=100, pop_size=50)
model = TPO.DevTPO(epoch=100, pop_size=50, alpha=0.3, beta=50., theta=0.9)
model = TSA.OriginalTSA(epoch=100, pop_size=50)
model = VCS.OriginalVCS(epoch=100, pop_size=50, lamda=0.5, sigma=0.3)
model = VCS.DevVCS(epoch=100, pop_size=50, lamda=0.5, sigma=0.3)
model = WHO.OriginalWHO(epoch=100, pop_size=50, n_explore_step=3, n_exploit_step=3, eta=0.15, p_hi=0.9, local_alpha=0.9, local_beta=0.3, global_alpha=0.2,
global_beta=0.8, delta_w=2.0, delta_c=2.0)
model = AOA.OriginalAOA(epoch=100, pop_size=50, alpha=5, miu=0.5, moa_min=0.2, moa_max=0.9)
model = CEM.OriginalCEM(epoch=100, pop_size=50, n_best=20, alpha=0.7)
model = CGO.OriginalCGO(epoch=100, pop_size=50)
model = CircleSA.OriginalCircleSA(epoch=100, pop_size=50, c_factor=0.8)
model = GBO.OriginalGBO(epoch=100, pop_size=50, pr=0.5, beta_min=0.2, beta_max=1.2)
model = HC.OriginalHC(epoch=100, pop_size=50, neighbour_size=50)
model = HC.SwarmHC(epoch=100, pop_size=50, neighbour_size=10)
model = INFO.OriginalINFO(epoch=100, pop_size=50)
model = PSS.OriginalPSS(epoch=100, pop_size=50, acceptance_rate=0.8, sampling_method="LHS")
model = RUN.OriginalRUN(epoch=100, pop_size=50)
model = SCA.OriginalSCA(epoch=100, pop_size=50)
model = SCA.DevSCA(epoch=100, pop_size=50)
model = SCA.QleSCA(epoch=100, pop_size=50, alpha=0.1, gama=0.9)
model = SHIO.OriginalSHIO(epoch=100, pop_size=50)
model = TS.OriginalTS(epoch=100, pop_size=50, tabu_size=5, neighbour_size=20, perturbation_scale=0.05)
model = HS.OriginalHS(epoch=100, pop_size=50, c_r=0.95, pa_r=0.05)
model = HS.DevHS(epoch=100, pop_size=50, c_r=0.95, pa_r=0.05)
model = AEO.OriginalAEO(epoch=100, pop_size=50)
model = AEO.EnhancedAEO(epoch=100, pop_size=50)
model = AEO.ModifiedAEO(epoch=100, pop_size=50)
model = AEO.ImprovedAEO(epoch=100, pop_size=50)
model = AEO.AugmentedAEO(epoch=100, pop_size=50)
model = GCO.OriginalGCO(epoch=100, pop_size=50, cr=0.7, wf=1.25)
model = GCO.DevGCO(epoch=100, pop_size=50, cr=0.7, wf=1.25)
model = WCA.OriginalWCA(epoch=100, pop_size=50, nsr=4, wc=2.0, dmax=1e-6)
model = CRO.OriginalCRO(epoch=100, pop_size=50, po=0.4, Fb=0.9, Fa=0.1, Fd=0.1, Pd=0.5, GCR=0.1, gamma_min=0.02, gamma_max=0.2, n_trials=5)
model = CRO.OCRO(epoch=100, pop_size=50, po=0.4, Fb=0.9, Fa=0.1, Fd=0.1, Pd=0.5, GCR=0.1, gamma_min=0.02, gamma_max=0.2, n_trials=5, restart_count=50)
model = DE.OriginalDE(epoch=100, pop_size=50, wf=0.7, cr=0.9, strategy=0)
model = DE.JADE(epoch=100, pop_size=50, miu_f=0.5, miu_cr=0.5, pt=0.1, ap=0.1)
model = DE.SADE(epoch=100, pop_size=50)
model = DE.SAP_DE(epoch=100, pop_size=50, branch="ABS")
model = EP.OriginalEP(epoch=100, pop_size=50, bout_size=0.05)
model = EP.LevyEP(epoch=100, pop_size=50, bout_size=0.05)
model = ES.OriginalES(epoch=100, pop_size=50, lamda=0.75)
model = ES.LevyES(epoch=100, pop_size=50, lamda=0.75)
model = ES.CMA_ES(epoch=100, pop_size=50)
model = ES.Simple_CMA_ES(epoch=100, pop_size=50)
model = FPA.OriginalFPA(epoch=100, pop_size=50, p_s=0.8, levy_multiplier=0.2)
model = MA.OriginalMA(epoch=100, pop_size=50, pc=0.85, pm=0.15, p_local=0.5, max_local_gens=10, bits_per_param=4)
model = SHADE.OriginalSHADE(epoch=100, pop_size=50, miu_f=0.5, miu_cr=0.5)
model = SHADE.L_SHADE(epoch=100, pop_size=50, miu_f=0.5, miu_cr=0.5)
model = BRO.OriginalBRO(epoch=100, pop_size=50, threshold=3)
model = BRO.DevBRO(epoch=100, pop_size=50, threshold=3)
model = BSO.OriginalBSO(epoch=100, pop_size=50, m_clusters=5, p1=0.2, p2=0.8, p3=0.4, p4=0.5, slope=20)
model = BSO.ImprovedBSO(epoch=100, pop_size=50, m_clusters=5, p1=0.25, p2=0.5, p3=0.75, p4=0.6)
model = CA.OriginalCA(epoch=100, pop_size=50, accepted_rate=0.15)
model = CHIO.OriginalCHIO(epoch=100, pop_size=50, brr=0.15, max_age=10)
model = CHIO.DevCHIO(epoch=100, pop_size=50, brr=0.15, max_age=10)
model = FBIO.OriginalFBIO(epoch=100, pop_size=50)
model = FBIO.DevFBIO(epoch=100, pop_size=50)
model = GSKA.OriginalGSKA(epoch=100, pop_size=50, pb=0.1, kf=0.5, kr=0.9, kg=5)
model = GSKA.DevGSKA(epoch=100, pop_size=50, pb=0.1, kr=0.9)
model = HBO.OriginalHBO(epoch=100, pop_size=50, degree=3)
model = HCO.OriginalHCO(epoch=100, pop_size=50, wfp=0.65, wfv=0.05, c1=1.4, c2=1.4)
model = ICA.OriginalICA(epoch=100, pop_size=50, empire_count=5, assimilation_coeff=1.5, revolution_prob=0.05, revolution_rate=0.1, revolution_step_size=0.1,
zeta=0.1)
model = LCO.OriginalLCO(epoch=100, pop_size=50, r1=2.35)
model = LCO.ImprovedLCO(epoch=100, pop_size=50)
model = LCO.DevLCO(epoch=100, pop_size=50, r1=2.35)
model = WarSO.OriginalWarSO(epoch=100, pop_size=50, rr=0.1)
model = TOA.OriginalTOA(epoch=100, pop_size=50)
model = TLO.OriginalTLO(epoch=100, pop_size=50)
model = TLO.ImprovedTLO(epoch=100, pop_size=50, n_teachers=5)
model = TLO.DevTLO(epoch=100, pop_size=50)
model = SSDO.OriginalSSDO(epoch=100, pop_size=50)
model = SPBO.OriginalSPBO(epoch=100, pop_size=50)
model = SPBO.DevSPBO(epoch=100, pop_size=50)
model = SARO.OriginalSARO(epoch=100, pop_size=50, se=0.5, mu=50)
model = SARO.DevSARO(epoch=100, pop_size=50, se=0.5, mu=50)
model = QSA.OriginalQSA(epoch=100, pop_size=50)
model = QSA.DevQSA(epoch=100, pop_size=50)
model = QSA.OppoQSA(epoch=100, pop_size=50)
model = QSA.LevyQSA(epoch=100, pop_size=50)
model = QSA.ImprovedQSA(epoch=100, pop_size=50)
model = ArchOA.OriginalArchOA(epoch=100, pop_size=50, c1=2, c2=5, c3=2, c4=0.5, acc_max=0.9, acc_min=0.1)
model = ASO.OriginalASO(epoch=100, pop_size=50, alpha=50, beta=0.2)
model = CDO.OriginalCDO(epoch=100, pop_size=50)
model = EFO.OriginalEFO(epoch=100, pop_size=50, r_rate=0.3, ps_rate=0.85, p_field=0.1, n_field=0.45)
model = EFO.DevEFO(epoch=100, pop_size=50, r_rate=0.3, ps_rate=0.85, p_field=0.1, n_field=0.45)
model = EO.OriginalEO(epoch=100, pop_size=50)
model = EO.AdaptiveEO(epoch=100, pop_size=50)
model = EO.ModifiedEO(epoch=100, pop_size=50)
model = EVO.OriginalEVO(epoch=100, pop_size=50)
model = FLA.OriginalFLA(epoch=100, pop_size=50, C1=0.5, C2=2.0, C3=0.1, C4=0.2, C5=2.0, DD=0.01)
model = HGSO.OriginalHGSO(epoch=100, pop_size=50, n_clusters=3)
model = MVO.OriginalMVO(epoch=100, pop_size=50, wep_min=0.2, wep_max=1.0)
model = MVO.DevMVO(epoch=100, pop_size=50, wep_min=0.2, wep_max=1.0)
model = NRO.OriginalNRO(epoch=100, pop_size=50)
model = RIME.OriginalRIME(epoch=100, pop_size=50, sr=5.0)
model = SA.OriginalSA(epoch=100, pop_size=50, temp_init=100, step_size=0.1)
model = SA.GaussianSA(epoch=100, pop_size=50, temp_init=100, cooling_rate=0.99, scale=0.1)
model = SA.SwarmSA(epoch=100, pop_size=50, max_sub_iter=5, t0=1000, t1=1, move_count=5, mutation_rate=0.1, mutation_step_size=0.1,
mutation_step_size_damp=0.99)
model = WDO.OriginalWDO(epoch=100, pop_size=50, RT=3, g_c=0.2, alp=0.4, c_e=0.4, max_v=0.3)
model = TWO.OriginalTWO(epoch=100, pop_size=50)
model = TWO.EnhancedTWO(epoch=100, pop_size=50)
model = TWO.OppoTWO(epoch=100, pop_size=50)
model = TWO.LevyTWO(epoch=100, pop_size=50)
model = ABC.OriginalABC(epoch=100, pop_size=50, n_limits=50)
model = ACOR.OriginalACOR(epoch=100, pop_size=50, sample_count=25, intent_factor=0.5, zeta=1.0)
model = AGTO.OriginalAGTO(epoch=100, pop_size=50, p1=0.03, p2=0.8, beta=3.0)
model = AGTO.MGTO(epoch=100, pop_size=50, pp=0.03)
model = BeesA.OriginalBeesA(epoch=100, pop_size=50, selected_site_ratio=0.5, elite_site_ratio=0.4, selected_site_bee_ratio=0.1, elite_site_bee_ratio=2.0,
dance_radius=0.1, dance_reduction=0.99)
model = BeesA.CleverBookBeesA(epoch=100, pop_size=50, n_elites=16, n_others=4, patch_size=5.0, patch_reduction=0.985, n_sites=3, n_elite_sites=1)
model = BeesA.ProbBeesA(epoch=100, pop_size=50, recruited_bee_ratio=0.1, dance_radius=0.1, dance_reduction=0.99)
model = BES.OriginalBES(epoch=100, pop_size=50, a_factor=10, R_factor=1.5, alpha=2.0, c1=2.0, c2=2.0)
model = BFO.OriginalBFO(epoch=100, pop_size=50, Ci=0.01, Ped=0.25, Nc=5, Ns=4, d_attract=0.1, w_attract=0.2, h_repels=0.1, w_repels=10)
model = BFO.ABFO(epoch=100, pop_size=50, C_s=0.1, C_e=0.001, Ped=0.01, Ns=4, N_adapt=2, N_split=40)
model = ZOA.OriginalZOA(epoch=100, pop_size=50)
model = WOA.OriginalWOA(epoch=100, pop_size=50)
model = WOA.HI_WOA(epoch=100, pop_size=50, feedback_max=10)
model = WaOA.OriginalWaOA(epoch=100, pop_size=50)
model = TSO.OriginalTSO(epoch=100, pop_size=50)
model = TDO.OriginalTDO(epoch=100, pop_size=50)
model = STO.OriginalSTO(epoch=100, pop_size=50)
model = SSpiderO.OriginalSSpiderO(epoch=100, pop_size=50, fp_min=0.65, fp_max=0.9)
model = SSpiderA.OriginalSSpiderA(epoch=100, pop_size=50, r_a=1.0, p_c=0.7, p_m=0.1)
model = SSO.OriginalSSO(epoch=100, pop_size=50)
model = SSA.OriginalSSA(epoch=100, pop_size=50, ST=0.8, PD=0.2, SD=0.1)
model = SSA.DevSSA(epoch=100, pop_size=50, ST=0.8, PD=0.2, SD=0.1)
model = SRSR.OriginalSRSR(epoch=100, pop_size=50)
model = SLO.OriginalSLO(epoch=100, pop_size=50)
model = SLO.ModifiedSLO(epoch=100, pop_size=50)
model = SLO.ImprovedSLO(epoch=100, pop_size=50, c1=1.2, c2=1.5)
model = SHO.OriginalSHO(epoch=100, pop_size=50, h_factor=5.0, n_trials=10)
model = SFO.OriginalSFO(epoch=100, pop_size=50, pp=0.1, AP=4.0, epsilon=0.0001)
model = SFO.ImprovedSFO(epoch=100, pop_size=50, pp=0.1)
model = ServalOA.OriginalServalOA(epoch=100, pop_size=50)
model = SeaHO.OriginalSeaHO(epoch=100, pop_size=50)
model = SCSO.OriginalSCSO(epoch=100, pop_size=50)
model = POA.OriginalPOA(epoch=100, pop_size=50)
model = PFA.OriginalPFA(epoch=100, pop_size=50)
model = OOA.OriginalOOA(epoch=100, pop_size=50)
model = NGO.OriginalNGO(epoch=100, pop_size=50)
model = NMRA.OriginalNMRA(epoch=100, pop_size=50, pb=0.75)
model = NMRA.ImprovedNMRA(epoch=100, pop_size=50, pb=0.75, pm=0.01)
model = MSA.OriginalMSA(epoch=100, pop_size=50, n_best=5, partition=0.5, max_step_size=1.0)
model = MRFO.OriginalMRFO(epoch=100, pop_size=50, somersault_range=2.0)
model = MRFO.WMQIMRFO(epoch=100, pop_size=50, somersault_range=2.0, pm=0.5)
model = MPA.OriginalMPA(epoch=100, pop_size=50)
model = MGO.OriginalMGO(epoch=100, pop_size=50)
model = MFO.OriginalMFO(epoch=100, pop_size=50)
model = JA.OriginalJA(epoch=100, pop_size=50)
model = JA.LevyJA(epoch=100, pop_size=50)
model = JA.DevJA(epoch=100, pop_size=50)
model = HHO.OriginalHHO(epoch=100, pop_size=50)
model = HGS.OriginalHGS(epoch=100, pop_size=50, PUP=0.08, LH=10000)
model = HBA.OriginalHBA(epoch=100, pop_size=50)
model = GWO.OriginalGWO(epoch=100, pop_size=50)
model = GWO.GWO_WOA(epoch=100, pop_size=50)
model = GWO.RW_GWO(epoch=100, pop_size=50)
model = GTO.OriginalGTO(epoch=100, pop_size=50, A=0.4, H=2.0)
model = GTO.Matlab101GTO(epoch=100, pop_size=50)
model = GTO.Matlab102GTO(epoch=100, pop_size=50)
model = GOA.OriginalGOA(epoch=100, pop_size=50, c_min=0.00004, c_max=1.0)
model = GJO.OriginalGJO(epoch=100, pop_size=50)
model = FOX.OriginalFOX(epoch=100, pop_size=50, c1=0.18, c2=0.82)
model = FOA.OriginalFOA(epoch=100, pop_size=50)
model = FOA.WhaleFOA(epoch=100, pop_size=50)
model = FOA.DevFOA(epoch=100, pop_size=50)
model = FFO.OriginalFFO(epoch=100, pop_size=50)
model = FFA.OriginalFFA(epoch=100, pop_size=50, gamma=0.001, beta_base=2, alpha=0.2, alpha_damp=0.99, delta=0.05, exponent=2)
model = FA.OriginalFA(epoch=100, pop_size=50, max_sparks=50, p_a=0.04, p_b=0.8, max_ea=40, m_sparks=50)
model = ESOA.OriginalESOA(epoch=100, pop_size=50)
model = EHO.OriginalEHO(epoch=100, pop_size=50, alpha=0.5, beta=0.5, n_clans=5)
model = DO.OriginalDO(epoch=100, pop_size=50)
model = DMOA.OriginalDMOA(epoch=100, pop_size=50, n_baby_sitter=3, peep=2)
model = DMOA.DevDMOA(epoch=100, pop_size=50, peep=2)
model = CSO.OriginalCSO(epoch=100, pop_size=50, mixture_ratio=0.15, smp=5, spc=False, cdc=0.8, srd=0.15, c1=0.4, w_min=0.4, w_max=0.9)
model = CSA.OriginalCSA(epoch=100, pop_size=50, p_a=0.3)
model = CoatiOA.OriginalCoatiOA(epoch=100, pop_size=50)
model = COA.OriginalCOA(epoch=100, pop_size=50, n_coyotes=5)
model = BSA.OriginalBSA(epoch=100, pop_size=50, ff=10, pff=0.8, c1=1.5, c2=1.5, a1=1.0, a2=1.0, fc=0.5)
```
Mealpy Application
### Mealpy + Neural Network (Replace the Gradient Descent Optimizer)
* Time-series Problem:
* Traditional MLP
code: [Link](https://github.com/thieu1995/mealpy/tree/master/examples/applications/keras/traditional-mlp-time-series.py)
* Hybrid code (Mealpy +
MLP): [Link](https://github.com/thieu1995/mealpy/tree/master/examples/applications/keras/mha-hybrid-mlp-time-series.py)
* Classification Problem:
* Traditional MLP
code: [Link](https://github.com/thieu1995/mealpy/blob/master/examples/applications/keras/traditional-mlp-classification.py)
* Hybrid code (Mealpy +
MLP): [Link](https://github.com/thieu1995/mealpy/blob/master/examples/applications/keras/mha-hybrid-mlp-classification.py)
### Mealpy + Neural Network (Optimize Neural Network Hyper-parameter)
Code: [Link](https://github.com/thieu1995/mealpy/blob/master/examples/applications/keras/mha-hyper-parameter-mlp-time-series.py)
### Other Applications
* Solving Knapsack Problem (Discrete
problems): [Link](https://github.com/thieu1995/mealpy/blob/master/examples/applications/discrete-problems/knapsack_problem.ipynb)
* Solving Product Planning Problem (Discrete
problems): [Link](https://github.com/thieu1995/mealpy/blob/master/examples/applications/discrete-problems/product_planning.ipynb)
* Optimize SVM (SVC)
model: [Link](https://github.com/thieu1995/mealpy/blob/master/examples/applications/sklearn/svm_classification.py)
* Optimize Linear Regression
Model: [Link](https://github.com/thieu1995/mealpy/blob/master/examples/applications/pytorch/linear_regression.py)
* Travelling Salesman Problem: https://github.com/thieu1995/MHA-TSP
* Feature selection problem: https://github.com/thieu1995/MHA-FS
Get Visualize Figures
* [Tutorials](/examples/utils/visualize/all_charts.py)
Tutorial Videos
All tutorial videos: [Link](https://mealpy.readthedocs.io/en/latest/pages/general/video_tutorials.html)
All code examples: [Link](https://github.com/thieu1995/mealpy/tree/master/examples)
All visualization examples: [Link](https://mealpy.readthedocs.io/en/latest/pages/visualization.html)
# Documents
## Official Channels (questions, problems)
* Official source code repo: https://github.com/thieu1995/mealpy
* Official document: https://mealpy.readthedocs.io/
* Download releases: https://pypi.org/project/mealpy/
* Issue tracker: https://github.com/thieu1995/mealpy/issues
* Notable changes log: https://github.com/thieu1995/mealpy/blob/master/ChangeLog.md
* Examples with different meapy version: https://github.com/thieu1995/mealpy/blob/master/EXAMPLES.md
* Official chat/support group: https://t.me/+fRVCJGuGJg1mNDg1
* This project also related to our another projects which are optimization and machine learning. Check it here:
* https://github.com/thieu1995/opfunu
* https://github.com/thieu1995/metaheuristics
* https://github.com/mafese
* https://github.com/permetrics
* https://github.com/pfevaluator
* https://github.com/MetaCluster
* https://github.com/enoppy
* https://github.com/aiir-team
## My Comments
* Meta-heuristic Categories: (Based on this article: [link](https://doi.org/10.1016/j.procs.2020.09.075))
+ Evolutionary-based: Idea from Darwin's law of natural selection, evolutionary computing
+ Swarm-based: Idea from movement, interaction of birds, organization of social ...
+ Physics-based: Idea from physics law such as Newton's law of universal gravitation, black hole, multiverse
+ Human-based: Idea from human interaction such as queuing search, teaching learning, ...
+ Biology-based: Idea from biology creature (or microorganism),...
+ System-based: Idea from eco-system, immune-system, network-system, ...
+ Math-based: Idea from mathematical form or mathematical law such as sin-cosin
+ Music-based: Idea from music instrument
* Difficulty - Difficulty Level (Personal Opinion): **Objective observation from author**. Depend on the number of
parameters, number of equations, the original ideas, time spend for coding, source lines of code (SLOC).
+ Easy: A few paras, few equations, SLOC very short
+ Medium: more equations than Easy level, SLOC longer than Easy level
+ Hard: Lots of equations, SLOC longer than Medium level, the paper hard to read.
+ Hard* - Very hard: Lots of equations, SLOC too long, the paper is very hard to read.
** For newbie, we recommend to read the paper of algorithms which difficulty is "easy" or "medium" difficulty level.
GroupNameModuleClassYearParasDifficultyEvolutionaryEvolutionary ProgrammingEPOriginalEP19643easyEvolutionary**LevyEP*3easyEvolutionaryEvolution StrategiesESOriginalES19713easyEvolutionary**LevyES*3easyEvolutionary**CMA_ES20032hardEvolutionary**Simple_CMA_ES20232mediumEvolutionaryMemetic AlgorithmMAOriginalMA19897easyEvolutionaryGenetic AlgorithmGABaseGA19924easyEvolutionary**SingleGA*7easyEvolutionary**MultiGA*7easyEvolutionary**EliteSingleGA*10easyEvolutionary**EliteMultiGA*10easyEvolutionaryDifferential EvolutionDEBaseDE19975easyEvolutionary**JADE20096mediumEvolutionary**SADE20052mediumEvolutionary**SAP_DE20063mediumEvolutionarySuccess-History Adaptation Differential EvolutionSHADEOriginalSHADE20134mediumEvolutionary**L_SHADE20144mediumEvolutionaryFlower Pollination AlgorithmFPAOriginalFPA20144mediumEvolutionaryCoral Reefs OptimizationCROOriginalCRO201411mediumEvolutionary**OCRO201912medium*********************SwarmParticle Swarm OptimizationPSOOriginalPSO19956easySwarm**PPSO20192mediumSwarm**HPSO_TVAC20174mediumSwarm**C_PSO20156mediumSwarm**CL_PSO20066mediumSwarmBacterial Foraging OptimizationBFOOriginalBFO200210hardSwarm**ABFO20198mediumSwarmBees AlgorithmBeesAOriginalBeesA20058mediumSwarm**ProbBeesA20155mediumSwarm**CleverBookBeesA20068mediumSwarmCat Swarm OptimizationCSOOriginalCSO200611hardSwarmArtificial Bee ColonyABCOriginalABC20078mediumSwarmAnt Colony OptimizationACOROriginalACOR20085easySwarmCuckoo Search AlgorithmCSAOriginalCSA20093mediumSwarmFirefly Algorithm FFAOriginalFFA20098easySwarmFireworks AlgorithmFAOriginalFA20107mediumSwarmBat AlgorithmBAOriginalBA20106mediumSwarm**AdaptiveBA20108mediumSwarm**ModifiedBA*5mediumSwarmFruit-fly Optimization AlgorithmFOAOriginalFOA20122easySwarm**BaseFOA*2easySwarm**WhaleFOA20202mediumSwarmSocial Spider OptimizationSSpiderOOriginalSSpiderO20184hard*SwarmGrey Wolf OptimizerGWOOriginalGWO20142easySwarm**RW_GWO20192easySwarmSocial Spider AlgorithmSSpiderAOriginalSSpiderA20155mediumSwarmAnt Lion OptimizerALOOriginalALO20152easySwarm**BaseALO*2easySwarmMoth Flame OptimizationMFOOriginalMFO20152easySwarm**BaseMFO*2easySwarmElephant Herding OptimizationEHOOriginalEHO20155easySwarmJaya AlgorithmJAOriginalJA20162easySwarm**BaseJA*2easySwarm**LevyJA20212easySwarmWhale Optimization AlgorithmWOAOriginalWOA20162mediumSwarm**HI_WOA20193mediumSwarmDragonfly OptimizationDOOriginalDO20162mediumSwarmBird Swarm AlgorithmBSAOriginalBSA20169mediumSwarmSpotted Hyena OptimizerSHOOriginalSHO20174mediumSwarmSalp Swarm OptimizationSSOOriginalSSO20172easySwarmSwarm Robotics Search And RescueSRSROriginalSRSR20172hard*SwarmGrasshopper Optimisation AlgorithmGOAOriginalGOA20174easySwarmCoyote Optimization AlgorithmCOAOriginalCOA20183mediumSwarmMoth Search AlgorithmMSAOriginalMSA20185easySwarmSea Lion OptimizationSLOOriginalSLO20192mediumSwarm**ModifiedSLO*2mediumSwarm**ImprovedSLO20224mediumSwarmNake Mole*Rat AlgorithmNMRAOriginalNMRA20193easySwarm**ImprovedNMRA*4mediumSwarmPathfinder AlgorithmPFAOriginalPFA20192mediumSwarmSailfish OptimizerSFOOriginalSFO20195easySwarm**ImprovedSFO*3mediumSwarmHarris Hawks OptimizationHHOOriginalHHO20192mediumSwarmManta Ray Foraging OptimizationMRFOOriginalMRFO20203mediumSwarmBald Eagle SearchBESOriginalBES20207easySwarmSparrow Search AlgorithmSSAOriginalSSA20205mediumSwarm**BaseSSA*5mediumSwarmHunger Games SearchHGSOriginalHGS20214mediumSwarmAquila OptimizerAOOriginalAO20212easySwarmHybrid Grey Wolf * Whale Optimization AlgorithmGWOGWO_WOA20222easySwarmMarine Predators AlgorithmMPAOriginalMPA20202mediumSwarmHoney Badger AlgorithmHBAOriginalHBA20222easySwarmSand Cat Swarm OptimizationSCSOOriginalSCSO20222easySwarmTuna Swarm OptimizationTSOOriginalTSO20212mediumSwarmAfrican Vultures Optimization AlgorithmAVOAOriginalAVOA20227mediumSwarmArtificial Gorilla Troops OptimizationAGTOOriginalAGTO20215mediumSwarm**MGTO20233mediumSwarmArtificial Rabbits OptimizationAROOriginalARO20222easySwarm**LARO20222easySwarm**IARO20222easySwarmEgret Swarm Optimization AlgorithmESOAOriginalESOA20222mediumSwarmFox OptimizerFOXOriginalFOX20234easySwarmGolden Jackal OptimizationGJOOriginalGJO20222easySwarmGiant Trevally OptimizationGTOOriginalGTO20224mediumSwarm**Matlab101GTO20222mediumSwarm**Matlab102GTO20232hardSwarmMountain Gazelle OptimizerMGOOriginalMGO20222easySwarmSea-Horse OptimizationSeaHOOriginalSeaHO20222medium*********************PhysicsSimulated AnneallingSAOriginalSA19839mediumPhysics**GaussianSA*5mediumPhysics**SwarmSA19879mediumPhysicsWind Driven OptimizationWDOOriginalWDO20137easyPhysicsMulti*Verse OptimizerMVOOriginalMVO20164easyPhysics**BaseMVO*4easyPhysicsTug of War OptimizationTWOOriginalTWO20162easyPhysics**OppoTWO*2mediumPhysics**LevyTWO*2mediumPhysics**EnhancedTWO20202mediumPhysicsElectromagnetic Field OptimizationEFOOriginalEFO20166easyPhysics**BaseEFO*6mediumPhysicsNuclear Reaction OptimizationNROOriginalNRO20192hard*PhysicsHenry Gas Solubility OptimizationHGSOOriginalHGSO20193mediumPhysicsAtom Search OptimizationASOOriginalASO20194mediumPhysicsEquilibrium OptimizerEOOriginalEO20192easyPhysics**ModifiedEO20202mediumPhysics**AdaptiveEO20202mediumPhysicsArchimedes Optimization AlgorithmArchOAOriginalArchOA20218mediumPhysicsChernobyl Disaster OptimizationCDOOriginalCDO20232easyPhysicsEnergy Valley OptimizationEVOOriginalEVO20232mediumPhysicsFick's Law AlgorithmFLAOriginalFLA20238hardPhysicsPhysical Phenomenon of RIME-iceRIMEOriginalRIME20233easy*********************HumanCulture AlgorithmCAOriginalCA19943easyHumanImperialist Competitive AlgorithmICAOriginalICA20078hard*HumanTeaching Learning*based OptimizationTLOOriginalTLO20112easyHuman**BaseTLO20122easyHuman**ITLO20133mediumHumanBrain Storm OptimizationBSOOriginalBSO20118mediumHuman**ImprovedBSO20177mediumHumanQueuing Search AlgorithmQSAOriginalQSA20192hardHuman**BaseQSA*2hardHuman**OppoQSA*2hardHuman**LevyQSA*2hardHuman**ImprovedQSA20212hardHumanSearch And Rescue OptimizationSAROOriginalSARO20194mediumHuman**BaseSARO*4mediumHumanLife Choice*Based Optimization LCOOriginalLCO20193easyHuman**BaseLCO*3easyHuman**ImprovedLCO*2easyHumanSocial Ski*Driver OptimizationSSDOOriginalSSDO20192easyHumanGaining Sharing Knowledge*based AlgorithmGSKAOriginalGSKA20196mediumHuman**BaseGSKA*4mediumHumanCoronavirus Herd Immunity OptimizationCHIOOriginalCHIO20204mediumHuman**BaseCHIO*4mediumHumanForensic*Based Investigation OptimizationFBIOOriginalFBIO20202mediumHuman**BaseFBIO*2mediumHumanBattle Royale OptimizationBROOriginalBRO20203mediumHuman**BaseBRO*3mediumHumanStudent Psychology Based OptimizationSPBOOriginalSPBO20202mediumHuman**DevSPBO*2mediumHumanHeap-based OptimizationHBOOriginalHBO20203mediumHumanHuman Conception OptimizationHCOOriginalHCO20226mediumHumanDwarf Mongoose Optimization AlgorithmDMOAOriginalDMOA20224mediumHuman**DevDMOA*3mediumHumanWar Strategy OptimizationWarSOOriginalWarSO20223easy*********************BioInvasive Weed OptimizationIWOOriginalIWO20067easyBioBiogeography*Based OptimizationBBOOriginalBBO20084easyBio**BaseBBO*4easyBioVirus Colony SearchVCSOriginalVCS20164hard*Bio**BaseVCS*4hard*BioSatin Bowerbird OptimizerSBOOriginalSBO20175easyBio**BaseSBO*5easyBioEarthworm Optimisation AlgorithmEOAOriginalEOA20188mediumBioWildebeest Herd OptimizationWHOOriginalWHO201912hardBioSlime Mould AlgorithmSMAOriginalSMA20203easyBio**BaseSMA*3easyBioBarnacles Mating OptimizerBMOOriginalBMO20183easyBioTunicate Swarm AlgorithmTSAOriginalTSA20202easyBioSymbiotic Organisms SearchSOSOriginalSOS20142mediumBioSeagull Optimization AlgorithmSOAOriginalSOA20193easyBio**DevSOA*3easyBioBrown-Bear Optimization AlgorithmBBOAOriginalBBOA20232mediumBioTree Physiology OptimizationTPOOriginalTPO20175medium*********************SystemGerminal Center OptimizationGCOOriginalGCO20184mediumSystem**BaseGCO*4mediumSystemWater Cycle AlgorithmWCAOriginalWCA20125mediumSystemArtificial Ecosystem*based OptimizationAEOOriginalAEO20192easySystem**EnhancedAEO20202mediumSystem**ModifiedAEO20202mediumSystem**ImprovedAEO20212mediumSystem**AugmentedAEO20222medium*********************MathHill ClimbingHCOriginalHC19933easyMath**SwarmHC*3easyMathCross-Entropy Method CEMOriginalCEM19974easyMathTabu SearchTSOriginalTS20045easyMathSine Cosine AlgorithmSCAOriginalSCA20162easyMath**BaseSCA*2easyMath**QLE-SCA20224hardMathGradient-Based OptimizerGBOOriginalGBO20205mediumMathArithmetic Optimization AlgorithmAOAOrginalAOA20216easyMathChaos Game OptimizationCGOOriginalCGO20212easyMathPareto-like Sequential SamplingPSSOriginalPSS20214mediumMathweIghted meaN oF vectOrsINFOOriginalINFO20222mediumMathRUNge Kutta optimizerRUNOriginalRUN20212hardMathCircle Search AlgorithmCircleSAOriginalCircleSA20223easyMathSuccess History Intelligent OptimizationSHIOOriginalSHIO20222easy*********************MusicHarmony SearchHSOriginalHS20014easyMusic**BaseHS*4easy+++++++++++++++++++++WARNINGPLEASE CHECK PLAGIARISM BEFORE USING BELOW ALGORITHMS*****SwarmCoati Optimization AlgorithmCoatiOAOriginalCoatiOA20232easy SwarmFennec For OptimizationFFOOriginalFFO20222easy SwarmNorthern Goshawk OptimizationNGOOriginalNGO20212easy SwarmOsprey Optimization AlgorithmOOAOriginalOOA20232easy SwarmPelican Optimization Algorithm POAOriginalPOA20232easy SwarmServal Optimization AlgorithmServalOAOriginalServalOA20222easy SwarmSiberian Tiger OptimizationSTOOriginalSTO20222easy SwarmTasmanian Devil OptimizationTDOOriginalTDO20222easy SwarmWalrus Optimization AlgorithmWaOAOriginalWaOA20222easy SwarmZebra Optimization Algorithm ZOAOriginalZOA20222easy HumanTeamwork Optimization AlgorithmTOAOriginalTOA20212easy
References
### A
* **ABC - Artificial Bee Colony**
* **OriginalABC**: Karaboga, D. (2005). An idea based on honey bee swarm for numerical optimization (Vol. 200, pp. 1-10). Technical report-tr06, Erciyes university, engineering faculty, computer engineering department.
* **ACOR - Ant Colony Optimization**.
* **OriginalACOR**: Socha, K., & Dorigo, M. (2008). Ant colony optimization for continuous domains. European journal of operational research, 185(3), 1155-1173.
* **ALO - Ant Lion Optimizer**
* **OriginalALO**: Mirjalili S (2015). “The Ant Lion Optimizer.” Advances in Engineering Software, 83, 80-98. doi: [10.1016/j.advengsoft.2015.01.010](https://doi.org/10.1016/j.advengsoft.2015.01.010)
* **BaseALO**: The developed version
* **AEO - Artificial Ecosystem-based Optimization**
* **OriginalAEO**: Zhao, W., Wang, L., & Zhang, Z. (2019). Artificial ecosystem-based optimization: a novel nature-inspired meta-heuristic algorithm. Neural Computing and Applications, 1-43.
* **AugmentedAEO**: Van Thieu, N., Barma, S. D., Van Lam, T., Kisi, O., & Mahesha, A. (2022). Groundwater level modeling using Augmented Artificial Ecosystem Optimization. Journal of Hydrology, 129034.
* **ImprovedAEO**: Rizk-Allah, R. M., & El-Fergany, A. A. (2020). Artificial ecosystem optimizer for parameters identification of proton exchange membrane fuel cells model. International Journal of Hydrogen Energy.
* **EnhancedAEO**: Eid, A., Kamel, S., Korashy, A., & Khurshaid, T. (2020). An Enhanced Artificial Ecosystem-Based Optimization for Optimal Allocation of Multiple Distributed Generations. IEEE Access, 8, 178493-178513.
* **ModifiedAEO**: Menesy, A. S., Sultan, H. M., Korashy, A., Banakhr, F. A., Ashmawy, M. G., & Kamel, S. (2020). Effective parameter extraction of different polymer electrolyte membrane fuel cell stack models using a modified artificial ecosystem optimization algorithm. IEEE Access, 8, 31892-31909.
* **ASO - Atom Search Optimization**
* **OriginalASO**: Zhao, W., Wang, L., & Zhang, Z. (2019). Atom search optimization and its application to solve a hydrogeologic parameter estimation problem. Knowledge-Based Systems, 163, 283-304.
* **ArchOA - Archimedes Optimization Algorithm**
* **OriginalArchOA**: Hashim, F. A., Hussain, K., Houssein, E. H., Mabrouk, M. S., & Al-Atabany, W. (2021). Archimedes optimization algorithm: a new metaheuristic algorithm for solving