https://github.com/tkoolen/julia-robotics-paper-code
Code associated with the paper "Julia for Robotics: Simulation and Real-time Control in a High-level Programming Language"
https://github.com/tkoolen/julia-robotics-paper-code
Last synced: 11 months ago
JSON representation
Code associated with the paper "Julia for Robotics: Simulation and Real-time Control in a High-level Programming Language"
- Host: GitHub
- URL: https://github.com/tkoolen/julia-robotics-paper-code
- Owner: tkoolen
- Created: 2018-09-14T21:50:59.000Z (almost 8 years ago)
- Default Branch: master
- Last Pushed: 2019-05-22T19:47:54.000Z (about 7 years ago)
- Last Synced: 2025-04-04T00:41:42.767Z (about 1 year ago)
- Language: Jupyter Notebook
- Homepage:
- Size: 5.17 MB
- Stars: 43
- Watchers: 5
- Forks: 4
- Open Issues: 0
-
Metadata Files:
- Readme: README.md
Awesome Lists containing this project
README
## Julia for Robotics: Simulation and Real-time Control in a High-level Programming Language
This repository contains code associated with the paper "Julia for Robotics: Simulation and Real-time Control in a High-level Programming Language", submitted to ICRA 2019.
### Video
The video associated with the paper can be found [here](https://player.vimeo.com/video/320647370).
### Packages
Main packages discussed in the paper:
* [RigidBodyDynamics.jl](https://github.com/JuliaRobotics/RigidBodyDynamics.jl): rigid body dynamics library.
* [MeshCat.jl](https://github.com/rdeits/MeshCat.jl): 3D visualizer.
* [RigidBodySim.jl](https://github.com/JuliaRobotics/RigidBodySim.jl): a simulation environment.
* [Parametron.jl](https://github.com/tkoolen/Parametron.jl): optimization framework.
* [QPControl.jl](https://github.com/tkoolen/QPControl.jl): QP-based low-level control algorithms.
Additional relevant packages:
* [StrandBeestRobot.jl](https://github.com/rdeits/StrandbeestRobot.jl): simulation of a strandbeest-like mechanism, used to create Fig. 3.
* [LCMCore.jl](https://github.com/JuliaRobotics/LCMCore.jl): bindings to the LCM (Lightweight Communications and Marshalling) message passing library.
* [QPWalkingControl.jl](https://github.com/tkoolen/QPWalkingControl.jl): a walking controller for Atlas based on QPControl.jl (under development).
### Setup
To run benchmarks and notebooks locally, simply clone the package and follow the instructions below.
### Benchmarks
* [benchmarks/dynamics](https://github.com/tkoolen/julia-robotics-paper-code/tree/master/benchmarks/dynamics): code used to benchmark RigidBodyDynamics.jl and RBDL (Table I).
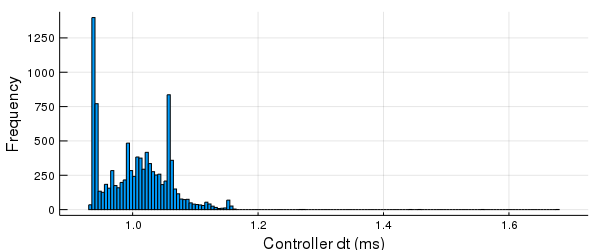
* [benchmarks/controller](https://github.com/tkoolen/julia-robotics-paper-code/tree/master/benchmarks/controller): controller benchmark code (used to create Fig. 6).
Please see the associated `README.md` for information on how to run these benchmarks.
The figure below shows an additional quick benchmark result for the standing controller that does *not* include network communication using LCMCore.jl, as opposed to the figure in the paper. There is one sample at 1.67 ms.
### Notebooks
The [`notebooks`](https://github.com/tkoolen/julia-robotics-paper-code/tree/master/notebooks) directory contains the Jupyter notebook used to generate Fig. 4.
Most of the packages listed above also have a `notebooks` directory with usage examples.