https://github.com/unmannedlab/LiDARNet
LiDARNet: A Boundary-Aware Domain Adaptation Model for Point Cloud Semantic Segmentation
https://github.com/unmannedlab/LiDARNet
3d-segmentation domain-adaptation lidar-point-cloud semantic-segmentation
Last synced: about 1 year ago
JSON representation
LiDARNet: A Boundary-Aware Domain Adaptation Model for Point Cloud Semantic Segmentation
- Host: GitHub
- URL: https://github.com/unmannedlab/LiDARNet
- Owner: unmannedlab
- Created: 2020-11-12T17:10:31.000Z (over 5 years ago)
- Default Branch: main
- Last Pushed: 2021-05-13T01:53:38.000Z (about 5 years ago)
- Last Synced: 2024-08-01T03:32:02.967Z (almost 2 years ago)
- Topics: 3d-segmentation, domain-adaptation, lidar-point-cloud, semantic-segmentation
- Homepage: https://unmannedlab.github.io/research/LiDARNet
- Size: 22.3 MB
- Stars: 32
- Watchers: 6
- Forks: 3
- Open Issues: 3
-
Metadata Files:
- Readme: README.md
Awesome Lists containing this project
README
# LiDARNet: A Boundary-Aware Domain Adaptation Model for Point Cloud Semantic Segmentation
We present a boundary-aware domain adaptation model for LiDAR scan full-scene semantic segmentation (LiDARNet). Our model can extract both the domain private features and the domain shared features with a two branch structure. We embedded Gated-SCNN into the segmentor component of LiDARNet to learn boundary information while learning to predict full-scene semantic segmentation labels. Moreover, we further reduce the domain gap by inducing the model to learn a mapping between two domains using the domain shared and private features. Besides, we introduce a new dataset ([SemanticUSL](https://unmannedlab.github.io/research/SemanticUSL)). The dataset has the same data format and ontology as SemanticKITTI. We conducted experiments on real-world datasets [SemanticKITTI](http://semantic-kitti.org/), [SemanticPOSS](poss.pku.edu.cn/semanticposs.html), and SemanticUSL, which have differences in channel distributions, reflectivity distributions, diversity of scenes, and sensors setup. Using our approach, we can get a single projection-based LiDAR full-scene semantic segmentation model working on both domains. Our model can keep almost the same performance on the source domain after adaptation and get an 8%-22% mIoU performance increase in the target domain.
**Updates:**
**The paper is released on [arXiv](https://arxiv.org/abs/2003.01174)**
**The Code will come soon**
## Results
**Experiment I: From SemanticKITTI to SemanticPOSS and SemanticUSL**
[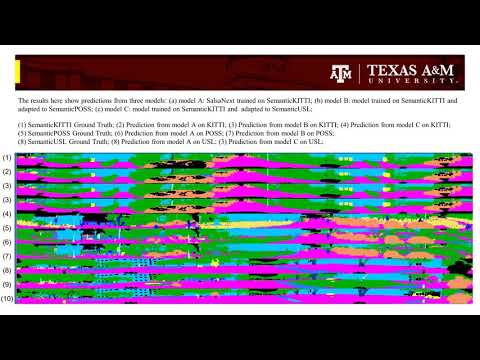](https://www.youtube.com/embed/62C9cKzw3eY)

**Experiment II: From SemanticPOSS to SemanticKITTI and SemanticUSL**
[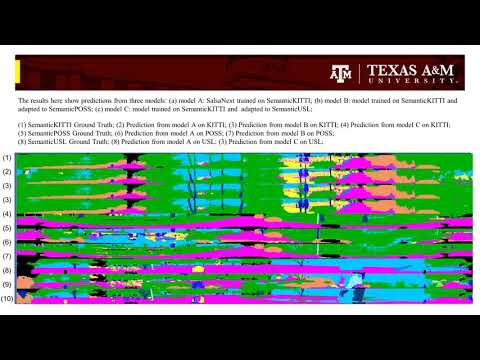](https://www.youtube.com/embed/jd-OaQ3jD5k)

**Experiment III: From SemanticUSL to SemanticPOSS and SemanticKTTI**
[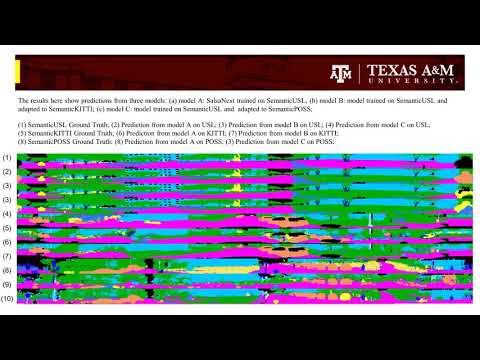](https://www.youtube.com/embed/eRk7VJbQsRM)

## Citation
```
@misc{jiang2021lidarnet,
title={LiDARNet: A Boundary-Aware Domain Adaptation Model for Point Cloud Semantic Segmentation},
author={Peng Jiang and Srikanth Saripalli},
year={2021},
eprint={2003.01174},
archivePrefix={arXiv},
primaryClass={cs.CV}
}
```
## Related Work
[SemanticUSL: A Dataset for Semantic Segmentation Domain Adatpation](https://unmannedlab.github.io/research/SemanticUSL)
[RELLIS-3D: A Multi-modal Dataset for Off-Road Robotics](https://unmannedlab.github.io/research/RELLS-3D)