https://github.com/varyshare/easy_slam_tutorial
首个中文的简单从零开始实现视觉SLAM理论与实践教程,使用Python实现。包括:ORB特征点提取,对极几何,视觉里程计后端优化,实时三维重建地图。A easy SLAM practical tutorial (Python).图像处理、otsu二值化。更多其他教程我的CSDN博客
https://github.com/varyshare/easy_slam_tutorial
code easy-slam-tutorial otsu-threshold practice-project simple slam slam-python
Last synced: over 1 year ago
JSON representation
首个中文的简单从零开始实现视觉SLAM理论与实践教程,使用Python实现。包括:ORB特征点提取,对极几何,视觉里程计后端优化,实时三维重建地图。A easy SLAM practical tutorial (Python).图像处理、otsu二值化。更多其他教程我的CSDN博客
- Host: GitHub
- URL: https://github.com/varyshare/easy_slam_tutorial
- Owner: varyshare
- License: mit
- Created: 2019-07-12T12:37:31.000Z (about 7 years ago)
- Default Branch: master
- Last Pushed: 2019-11-25T12:39:52.000Z (over 6 years ago)
- Last Synced: 2024-08-02T18:40:14.808Z (almost 2 years ago)
- Topics: code, easy-slam-tutorial, otsu-threshold, practice-project, simple, slam, slam-python
- Language: Jupyter Notebook
- Homepage: https://blog.csdn.net/varyshare
- Size: 20.6 MB
- Stars: 342
- Watchers: 14
- Forks: 91
- Open Issues: 0
-
Metadata Files:
- Readme: README.md
- License: LICENSE
Awesome Lists containing this project
- awesome-learning - Step by step tutorial for visual SLAM using Python
README
# Easy SLAM and Robotic Tutorial Python Implement
# 简单的SLAM与机器人教程Python代码实现
**欢迎点小星星收藏本github项目**,如果你想增加内容欢迎fork,然后再在自己项目下修改,然后提交合并请求。或者发私信给[知乎@司南牧](https://www.zhihu.com/people/yuanmuou/activities),please feel free。
项目作者:[知乎@司南牧](https://www.zhihu.com/people/yuanmuou/activities)
# How to learn SLAM and Robotic
[](https://travis-ci.org/varyshare/easy_slam_tutorial)
[](https://github.com/varyshare/easy_slam_tutorial/blob/master/README.md)
[](https://ci.appveyor.com/project/varyshare/easy_slam_tutorial)
[](https://lgtm.com/projects/g/AtsushiSakai/PythonRobotics/context:python)
[](https://www.codefactor.io/repository/github/varyshare/easy_slam_tutorial/overview/master)
[](https://github.com/varyshare/easy_slam_tutorial)
[](https://www.zhihu.com/people/yuanmuou/activities)
简单的从零开始实现视觉SLAM理论与实践教程,使用Python实现。包括:ORB特征点提取,对极几何,视觉里程计后端优化,实时三维重建地图。Otsu二值化、贝叶斯滤波、快速连通域标记算法,带标记的目标跟踪实践
# A easy SLAM practical tutorial (Python).
## 目录
## [特征提取](./feature_extract/)
### [从零开始实现FAST特征点提取算法教程](./feature_extract/从零开始实现FAST特征点提取算法教程.md)
[FAST教程](./feature_extract/从零开始实现FAST特征点提取算法教程.md) [代码](./feature_extract/FAST_feature_extraction.py)
### 计算机图形学Bresenham画圆法Python实现
[教程](./feature_extract/Bresenham布雷森汉姆算法画圆教程.md) [代码](./feature_extract/bresenham_circle.py)

### ORB特征提取Python调用OpenCV2实现
ORB特征提取主要是[FAST提取特征点](./feature_extract/从零开始实现FAST特征点提取算法教程.md)+[BRIEF算法](https://blog.csdn.net/varyshare/article/details/96568030)提取周围信息
[代码](./feature_extract/ORB_feature_extract.py)

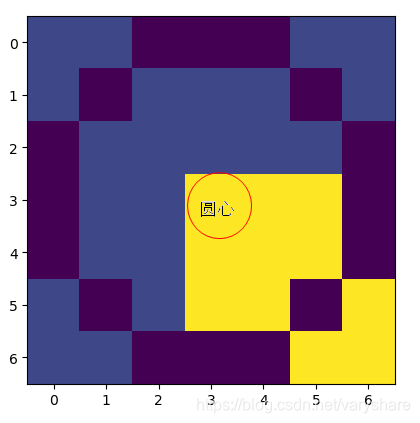
## Otsu二值化算法/大津算法(Otsu's Method Algorithm )
[教程+Python源代码](./Otsu's_Method_algorithm/如何理解图像处理中的Otsu's 二值化算法(大津算法)Python编程实践.md)

# 高斯模糊代码+教程
[教程+Python源代码](./image_smooth_blur/如何理解高斯模糊原理与具体Python编程实现.ipynb)

### Fast Labeling快速标记连通物体检测与标记目标追踪
[连通组件检测与标记目标追踪代码与教程](./Connected_Components)
[连通组件检测与标记目标追踪真实场景实践](./Connected_Components/real_scene_practice)
# 十分钟如何理解RANSAC算法Python实践
[RANSAC教程与代码](RANSAC)
# 机器人模拟
## [两连杆机械臂机器人(2DOF)模拟](./joint_robot_simulation/)
鼠标选定屏幕上一点,然后求逆解进行运动Python实现代码
代码地址(同一个文件夹):[two_joint_arm_robot.py](./joint_robot_simulation/two_joint_arm_robot.py)
下面是效果图,**打开你的编辑器跟着我写的代码实践吧,你的star收藏和关注是我持续分享的动力** 。