https://github.com/vmanoj1996/mujoco-demo
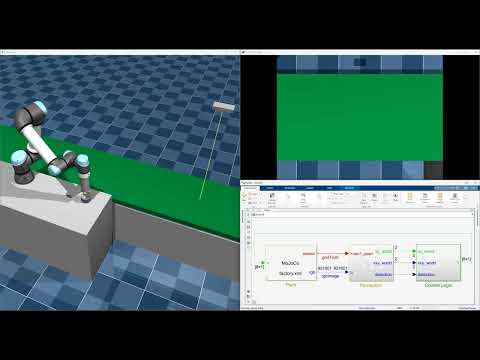
Pick and place using Simulink and MuJoCo
https://github.com/vmanoj1996/mujoco-demo
mujoco physics-simulation robotics simulink stateflow
Last synced: about 1 year ago
JSON representation
Pick and place using Simulink and MuJoCo
- Host: GitHub
- URL: https://github.com/vmanoj1996/mujoco-demo
- Owner: vmanoj1996
- License: mit
- Created: 2023-06-26T11:33:48.000Z (almost 3 years ago)
- Default Branch: main
- Last Pushed: 2023-06-29T19:25:27.000Z (almost 3 years ago)
- Last Synced: 2025-03-30T20:52:00.743Z (about 1 year ago)
- Topics: mujoco, physics-simulation, robotics, simulink, stateflow
- Homepage: https://www.youtube.com/watch?v=wVSQ-lmArJY
- Size: 3.44 MB
- Stars: 9
- Watchers: 1
- Forks: 3
- Open Issues: 0
-
Metadata Files:
- Readme: README.md
- License: LICENSE
Awesome Lists containing this project
README
# mujoco-demo
[](http://www.youtube.com/watch?v=wVSQ-lmArJY)
## Instructions
1. Download and setup [mujoco-simulink-blockset](https://github.com/mathworks-robotics/mujoco-simulink-blockset)
2. Install a supported C/C++ compiler and run,
a. mex -setup c
b. mex -setup c++
4. Open examples/ folder in MATLAB and run builder.m (ignore the warnings)
5. Run start.m
6. Open factory.slx and click on run
## Acknowledgements:
Models from MuJoCo Menagerie were used in this work. Refer to https://github.com/deepmind/mujoco_menagerie for more information.