https://github.com/willigarneau/sobel-filter-cuda
🖼️ Assignment 1 in Intelligent Industrial System at Cégep Lévis-Lauzon. Learning Cuda and OpenCV by creating a sobel filter. 💻
https://github.com/willigarneau/sobel-filter-cuda
cplusplus cuda filter opencv sobel
Last synced: 2 months ago
JSON representation
🖼️ Assignment 1 in Intelligent Industrial System at Cégep Lévis-Lauzon. Learning Cuda and OpenCV by creating a sobel filter. 💻
- Host: GitHub
- URL: https://github.com/willigarneau/sobel-filter-cuda
- Owner: willigarneau
- Created: 2018-09-05T18:04:57.000Z (almost 8 years ago)
- Default Branch: master
- Last Pushed: 2018-11-19T13:57:42.000Z (over 7 years ago)
- Last Synced: 2025-10-24T11:03:11.648Z (8 months ago)
- Topics: cplusplus, cuda, filter, opencv, sobel
- Language: Cuda
- Homepage:
- Size: 27.3 MB
- Stars: 1
- Watchers: 0
- Forks: 1
- Open Issues: 0
-
Metadata Files:
- Readme: README.md
Awesome Lists containing this project
README
# ASSIGNMENT 1 - Industrial Intelligent System
> 🖼️ Laboratory 1 in Intelligent Industrial System at Cégep Lévis-Lauzon. Learning Cuda and OpenCV by creating a sobel filter. 💻
## Part 1 :
> Creating a program in cuda and C++ to apply a constant increment to any image, with OpenCV and Cuda.
#### Code example :
> This is the general function which will add the constant to each pixels.
```c++
Mat SerialBlackAndWhite(Mat imgToConvert) {
int rows = imgToConvert.rows;
int cols = imgToConvert.cols;
Mat gray(rows, cols, CV_8UC1);
for (int r = 0; r < rows; r++) {
for (int c = 0; c < cols; c++) {
double gray_val = (int)imgToConvert.at(r, c) + PIXEL_INCREMENTATION;
gray.at(r, c) = (uchar)gray_val;
}
}
return gray;
}
```
# Sobel Edge Detector
A Sobel Edge Detection Filter written in OpenCV, Cuda and C++. Made with no external library
#### Calculating vertical gradient :
```c++
int yGradient(Mat frame, Point position) {
int tGradient = 0;
for (int x = 0; x < 3; x++) {
for (int y = 0; y < 3; y++) {
int rows = position.y + y;
int cols = position.x + x;
int currentPixelValue = (int)frame.at(rows, cols);
int currentGradient = currentPixelValue * Gy[x][y];
tGradient += currentGradient;
currentGradient > maximumGradient ? maximumGradient = currentGradient : maximumGradient;
}
}
return tGradient;
}
```
#### Calculating horizontal gradient :
```c++
int xGradient(Mat frame, Point position) {
int tGradient = 0;
for (int x = 0; x < 3; x++) {
for (int y = 0; y < 3; y++) {
int rows = position.y + y;
int cols = position.x + x;
int currentPixelValue = (int)frame.at(rows, cols);
int currentGradient = currentPixelValue * Gx[x][y];
tGradient += currentGradient;
currentGradient > maximumGradient ? maximumGradient = currentGradient: maximumGradient;
}
}
return tGradient;
}
```
#### And applying them to the actual image
```c++
Mat SerialSobel(Mat imgToConvert) {
for (int rows = 0; rows < imgToConvert.rows - 2; rows++) {
for (int cols = 0; cols < imgToConvert.cols - 2; cols++) {
int currentPixel = imgToConvert.at(rows, cols);
Point currentPosition = Point(cols, rows);
int gradientX = xGradient(imgToConvert, currentPosition);
int gradientY = yGradient(imgToConvert, currentPosition);
int approxGradient = (abs(gradientX) + abs(gradientY) * 255) / maximumGradient;
imgToConvert.at(rows, cols) = approxGradient;
}
}
return imgToConvert;
}
```
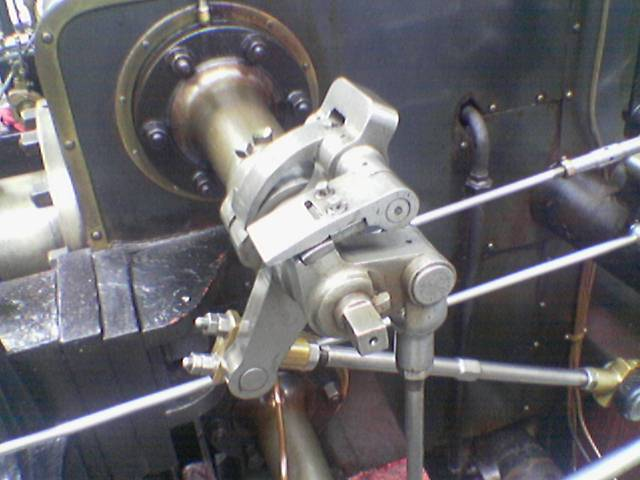
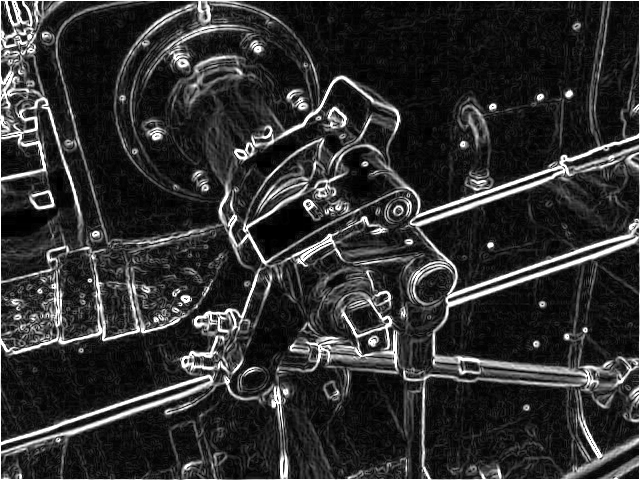
## Example
Here's what this program does: