https://github.com/zjlywjh001/CAN_OMEGA
Ultimate CAN Bus tool for Car hacking. Full Featured hardware & software.
https://github.com/zjlywjh001/CAN_OMEGA
Last synced: 5 months ago
JSON representation
Ultimate CAN Bus tool for Car hacking. Full Featured hardware & software.
- Host: GitHub
- URL: https://github.com/zjlywjh001/CAN_OMEGA
- Owner: zjlywjh001
- License: mit
- Created: 2016-07-29T09:08:17.000Z (over 8 years ago)
- Default Branch: master
- Last Pushed: 2017-02-13T12:29:31.000Z (about 8 years ago)
- Last Synced: 2024-08-03T04:08:41.274Z (9 months ago)
- Homepage:
- Size: 49.8 MB
- Stars: 45
- Watchers: 7
- Forks: 9
- Open Issues: 1
-
Metadata Files:
- Readme: README.md
- License: LICENSE
Awesome Lists containing this project
- awesome-canbus - CAN_OMEGA - Ultimate CAN Bus hardware for Car hacking based on STM32F411. Full Featured [firmware](https://github.com/zjlywjh001/CAN_Omega_Firmware) & [software](https://github.com/zjlywjh001/CAN_OMEGA_Tools). (Hardware / ARM)
README
# CAN_OMEGA
Ultimate CAN Bus tool for Car hacking.
Command set is compatible with USBTin
## Features
Support full OBD-II Features including followings:
ISO15765 CAN250Kbps 11bit
ISO15765 CAN250Kbps 29bit
ISO15765 CAN500Kbps 11bit
ISO15765 CAN500Kbps 29bit
ISO9141-2 5bps Init
ISO14230 KWP2000 5bps Init
ISO14230 KWP2000 Fast Init
SAE J1850 PWM
SAE J1850 VPW
Multi-Frame Support
Soft-controlled end-point matching resistors.
Support for incomming CAN FD. (use MCP2517FD in place of MCP2515)
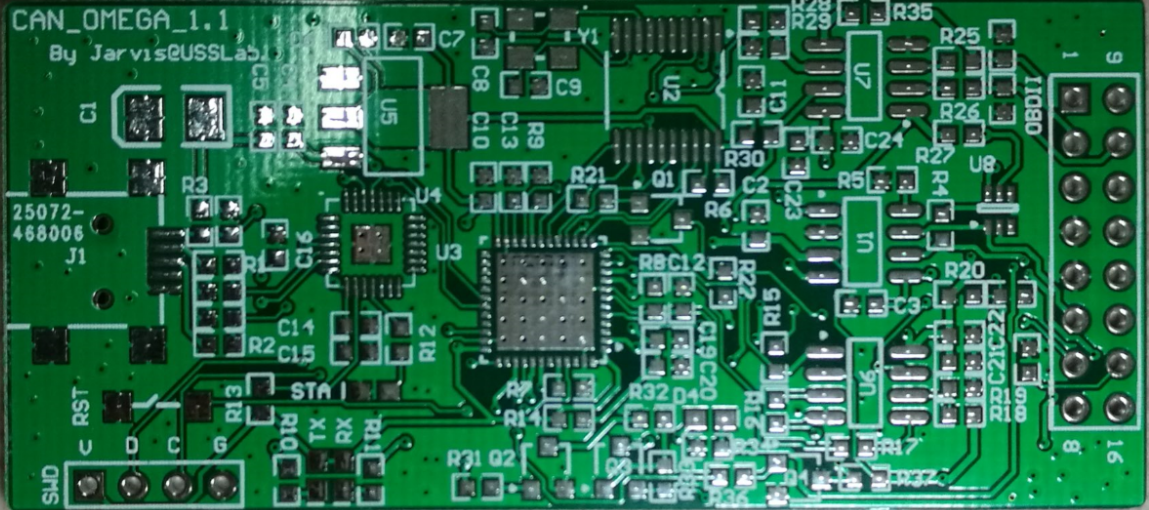
## v1.1 PCB Photo
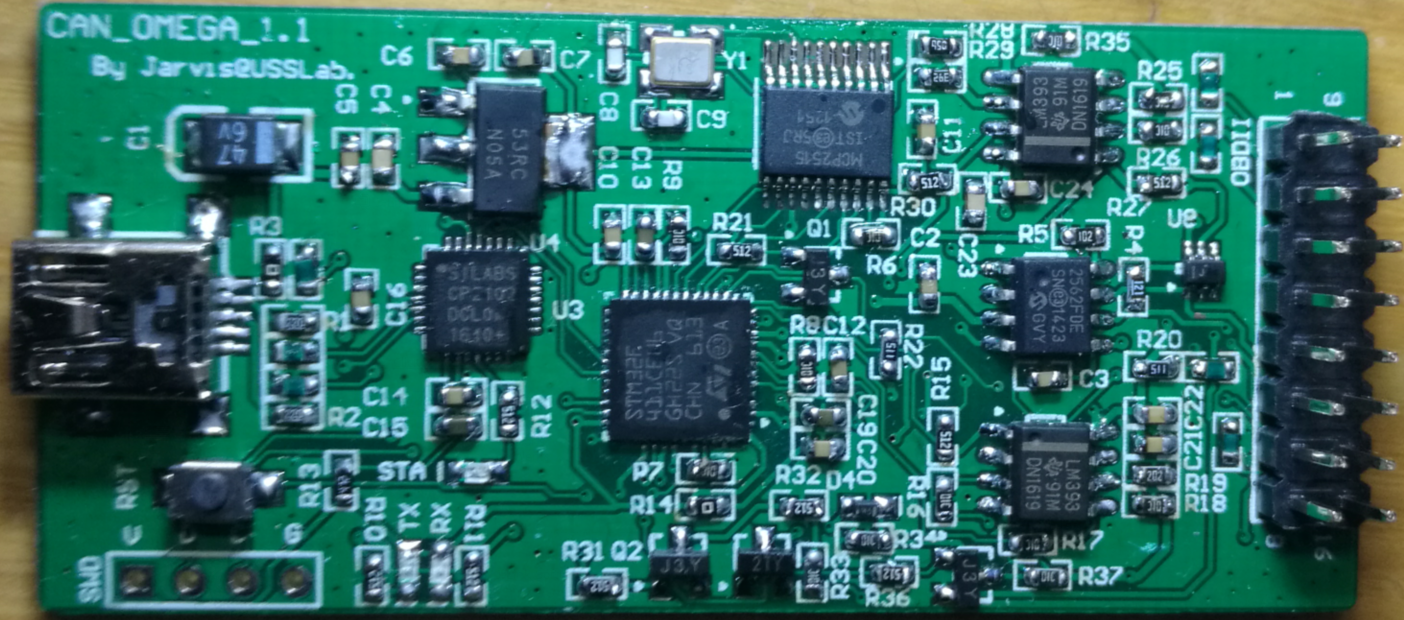
## v1.1 Assembled Board
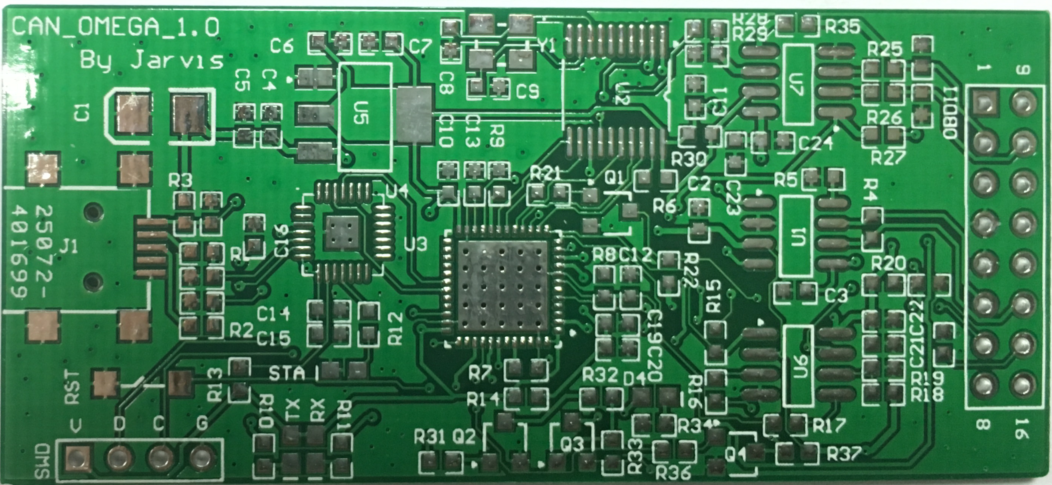
## v1.0 PCB Photo
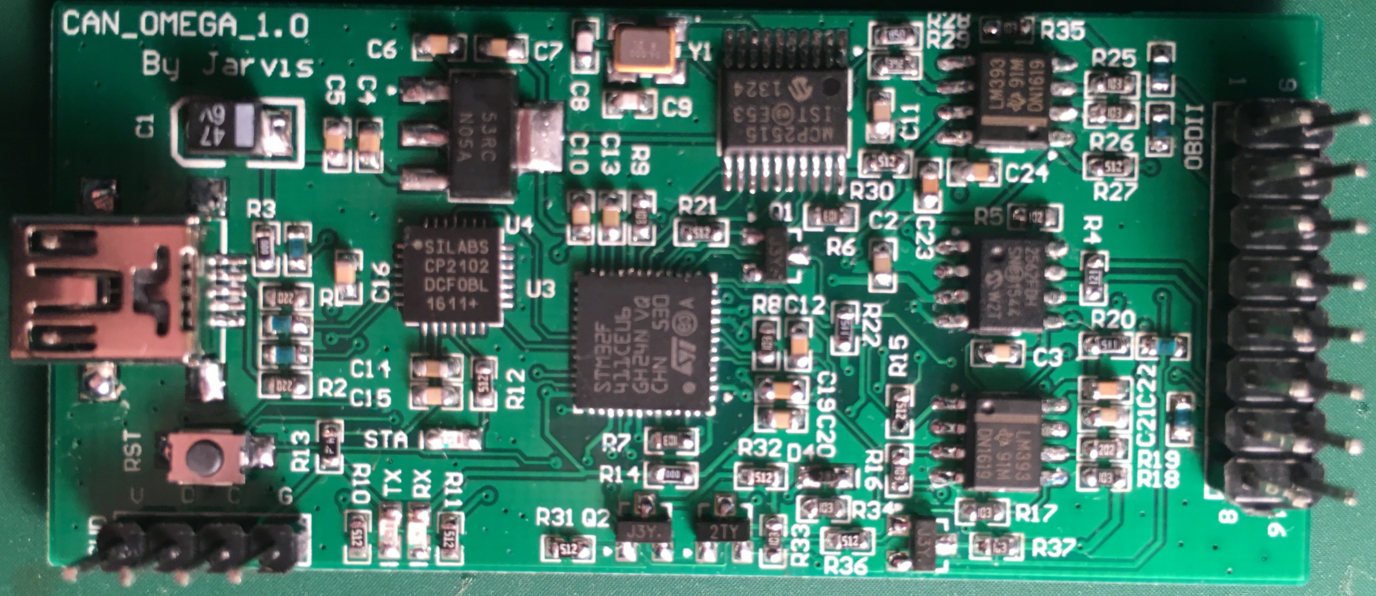
## v1.0 Assembled Board
## Drivers
CAN Omega use CP2102 chip to convert UART to USB.
For Linux, Windows >8 no additional driver is needed!
CAN Omega will be automatically detected as virtual serial port.
Device is mapped to serial port "/dev/ttyUSBx" (Linux) or "COMx" (Windows).
For Windows<8 and Mac OS, you can get the corresponding drivers here:
[http://www.silabs.com/products/mcu/pages/usbtouartbridgevcpdrivers.aspx](http://www.silabs.com/products/mcu/pages/usbtouartbridgevcpdrivers.aspx)
And On MacOS the Device's serial Port will become "/dev/tty.SLAB_USBtoUART", you needed input the port name manually.
The Serial Port works in 115200 8 N 1 Mode.
## Firmware Repository
See here for more details: [https://github.com/zjlywjh001/CAN_Omega_Firmware](https://github.com/zjlywjh001/CAN_Omega_Firmware)
Notice:
Firmware should work with the bootloader, but the source code of the bootloader can't be released due to some license issues.
So I can only release the bootloader in binary.
## A cross platform GUI tool.
See here for more details: [https://github.com/zjlywjh001/CAN_OMEGA_Tools](https://github.com/zjlywjh001/CAN_OMEGA_Tools)
Requirement: JRE >= 1.8

This tool offers the following functions:
CAN/K-Line/J1850 Packet Transreceiver
CAN Packet Analysis
CAN Fuzzing tool
Frimware Update
## Command Set
Following commands are inherited from USBTin's Command Set:
Sx[CR]:--------Set CAN Bus baudrate
x: Bitrate id (0-8)
S0 = 10 kBaud
S1 = 20 kBaud
S2 = 50 kBaud
S3 = 100 kBaud
S4 = 125 kBaud
S5 = 250 kBaud
S6 = 500 kBaud
S7 = 800 kBaud
S8 = 1 MBaud
sxxyyzz[CR]--- -Set can bitrate registers of MCP2515. You can set non-standard baudrates which are not supported by the "Sx" command.
xx: CNF1 as hexadecimal value (00-FF)
yy: CNF2 as hexadecimal value (00-FF)
zz: CNF3 as hexadecimal value
Gxx[CR] --- Read MCP2515 register.
xx: Address of MCP2515 register to read as hexadecimal value (00-FF).
Wxxyy[CR] ---Write MCP2515 register.
xx: Address of MCP2515 register to write. Hexadecimal value (00-FF).
yy: Data to write to the register. Hexadecimal value (00-FF).
V[CR]---Get hardware version
v[CR]---Get firmware version.
N[CR]---Get serial number. Returns always 0xffff.
O[CR]---Open CAN channel.
l[CR]---Open device in loop back mode.
L[CR]---Open CAN channel in listen-only mode.
C[CR]---Close CAN channel
tiiildd..[CR]---Transmit standard (11 bit) frame.
iii: Identifier in hexadecimal format (000-7FF)
l: Data length (0-8)
dd: Data byte value in hexadecimal format (00-FF)
Tiiiiiiiildd..[CR]---Transmit extended (29 bit) frame.
iiiiiiii: Identifier in hexadecimal format (0000000-1FFFFFFF)
l: Data length (0-8)
dd: Data byte value in hexadecimal format (00-FF)
riiil[CR] --- Transmit standard RTR (11 bit) frame.
iii: Identifier in hexadecimal format (000-7FF)
l: Data length (0-8)
Riiiiiiiil[CR]---Transmit extended RTR (29 bit) frame.
iiiiiiii: Identifier in hexadecimal format (0000000-1FFFFFFF)
l: Data length (0-8)
F[CR]---Read status/error flag of can controller
Return: Fxx[CR] with xx as hexadecimal byte with following error flags:
Bit 0 - not used
Bit 1 - not used
Bit 2 - Error warning (Bit EWARN of MCP2515)
Bit 3 - Data overrun (Bit RX1OVR or RX0OVR of MCP2515)
Bit 4 - not used
Bit 5 - Error-Passive (Bit TXEP or RXEP of MCP2515)
Bit 6 - not used
Bit 7 - Bus error (Bit TXBO of MCP2515)
Zx[CR]---Set timestamping on/off.
x: 0=off, 1=on
mxxxxxxxx[CR]---Set accpetance filter mask. SJA1000 format (AM0..AM3). Only first 11bit are relevant.
xxxxxxxx: Acceptance filter mask
Mxxxxxxxx[CR]---Set accpetance filter code. SJA1000 format (AC0..AC3). Only first 11bit are relevant.
xxxxxxxx: Acceptance filter code
And the following commands are added in CAN Omega:
b[CR] --- reset Device
f -- CAN Fuzzing Function
Examples:
fz[CR] --- Pause Fuzzing
fP[CR] --- Stop Fuzzing
fr[CR] --- Resume Fuzzing
fuzzing config format:
f [d/D] [id] [dlc] [s/S] [FROM] [TO] [g/G] p [period] (u [until] m [mask]) [CR], part in bracket is depend on [s/S] option
[d/D] means extended frame or not. d represent for fuzzing 11bit packet,[id] should be 11 bit, 'D' means 29bit
[dlc] is packet len
[s/S] 's' means this config has a until config, when a receiving packet match the pattern the fuzzing will stop. And 'S' for fuzzing without a 'until' config.(with out the data in brackets)
[FROM] is the start packet, encoded in hex
[TO] is the end packet, encoded in hex
(Every byte in [TO] config should be strict greater than correspoding byte in [FROM])
[g/G] is the fuzzing order. g for left byte first increase, and G for right byte first increase
[period] the time delay between two packets, unit in microsecond(us), encoded in hex.
[until] [mask] until is a packet of length 8,and mask decide which byte in [until] shoud be math, 1 - match 0 - not care
the bit 0 of mask is for the far left byte, and bit 7 is the far right byte
example1:
fd0013s0201000201FFgp3E8u0201050000000000m05
fuzzing id:001
dlc: 3
fuzzing from 02 01 00
fuzzing to 02 01 FF
left byte increase first
period 1ms
until on receive 02 01 05-- only compare 02 and 05
example2:
fD000007DF3S0201000201FFGp3E8
fuzzing id:000007DF
dlc: 3
fuzzing from 02 01 00
fuzzing to 02 01 FF
left byte increase first
period 1ms
no until settings
k -- K line transrece function
kak[CR] --- Activate ECU in KWP2000 Fast Init Mode
kai[CR] --- Activate ECU in ISO9141-2 5BPS Init Mode
kaI[CR] --- Activate ECU in KWP2000 5BPS Init Mode
the last two mode is a bit slow, may take 5-15 seconds to activate ECU, when activated successfully, will return o[CR] bytes.
So be patient when using these protocols.
kk [len] [data] [CR] --- Send K Line Message after activated
the return data format is kXXXXXXXXXXXX[CR] encoded in hex
d[CR] --- deactive K Line
jp [len] [Data] [CR] -- Send J1850 Packet in PWM Mode
jv [len] [Data] [CR] -- Send J1850 Packet in VPW Mode
U[CR] --- Reboot and enter bootloader
Notice:
When Entering Bootloader it will wait for 3 seconds for another 'U' char. When Received 'U' with in 3 seconds, the bootloader will start firmware update function.
Following Commands are available in CAN Omega 1.1 or later hardware only.
A[CR] --- Set Terminal Resistor to Open Circuit (Default on boot)
a[CR] --- Set Terminal Resistor to 120-Ohms
## License
MIT License