https://github.com/zlogic/matrix-eyes
A Rust port of Apple Depth Pro which can output stereograms and 3D models
https://github.com/zlogic/matrix-eyes
3d-reconstruction autostereogram burn depth-pro machine-learning
Last synced: 13 days ago
JSON representation
A Rust port of Apple Depth Pro which can output stereograms and 3D models
- Host: GitHub
- URL: https://github.com/zlogic/matrix-eyes
- Owner: zlogic
- License: apache-2.0
- Created: 2023-01-21T13:23:51.000Z (over 3 years ago)
- Default Branch: main
- Last Pushed: 2025-02-19T16:44:06.000Z (over 1 year ago)
- Last Synced: 2025-02-19T17:29:58.285Z (over 1 year ago)
- Topics: 3d-reconstruction, autostereogram, burn, depth-pro, machine-learning
- Language: Rust
- Homepage:
- Size: 239 KB
- Stars: 0
- Watchers: 2
- Forks: 0
- Open Issues: 0
-
Metadata Files:
- Readme: README.md
- License: LICENSE
Awesome Lists containing this project
README
# Matrix Eyes

Matrix Eyes is a Rust port of [Apple Depth Pro](https://github.com/apple/ml-depth-pro) project to convert a photo image into an [autostereogram](https://en.wikipedia.org/wiki/Autostereogram) or 3D mesh.
For running ML models, the [burn](https://github.com/tracel-ai/burn) library is used. There's also an experimental version using [candle](https://github.com/huggingface/candle) in the [candle tag](https://github.com/zlogic/matrix-eyes/tree/candle).
The [python tag](https://github.com/zlogic/matrix-eyes/tree/python) contains an older Python-based version which supported both [MiDaS](https://arxiv.org/abs/1907.01341) and [Apple Depth Pro](https://arxiv.org/abs/2410.02073) depth estimation algorithms.
This app reuses some code from [Cybervision](https://github.com/zlogic/cybervision), and tries to achieve the same goal. Cybervision uses a "classic" structure-from-motion approach and reconstructs objects from multiple views, while Matrix Eyes uses a pretrained machine learning model to add depth to a single image.
# Examples
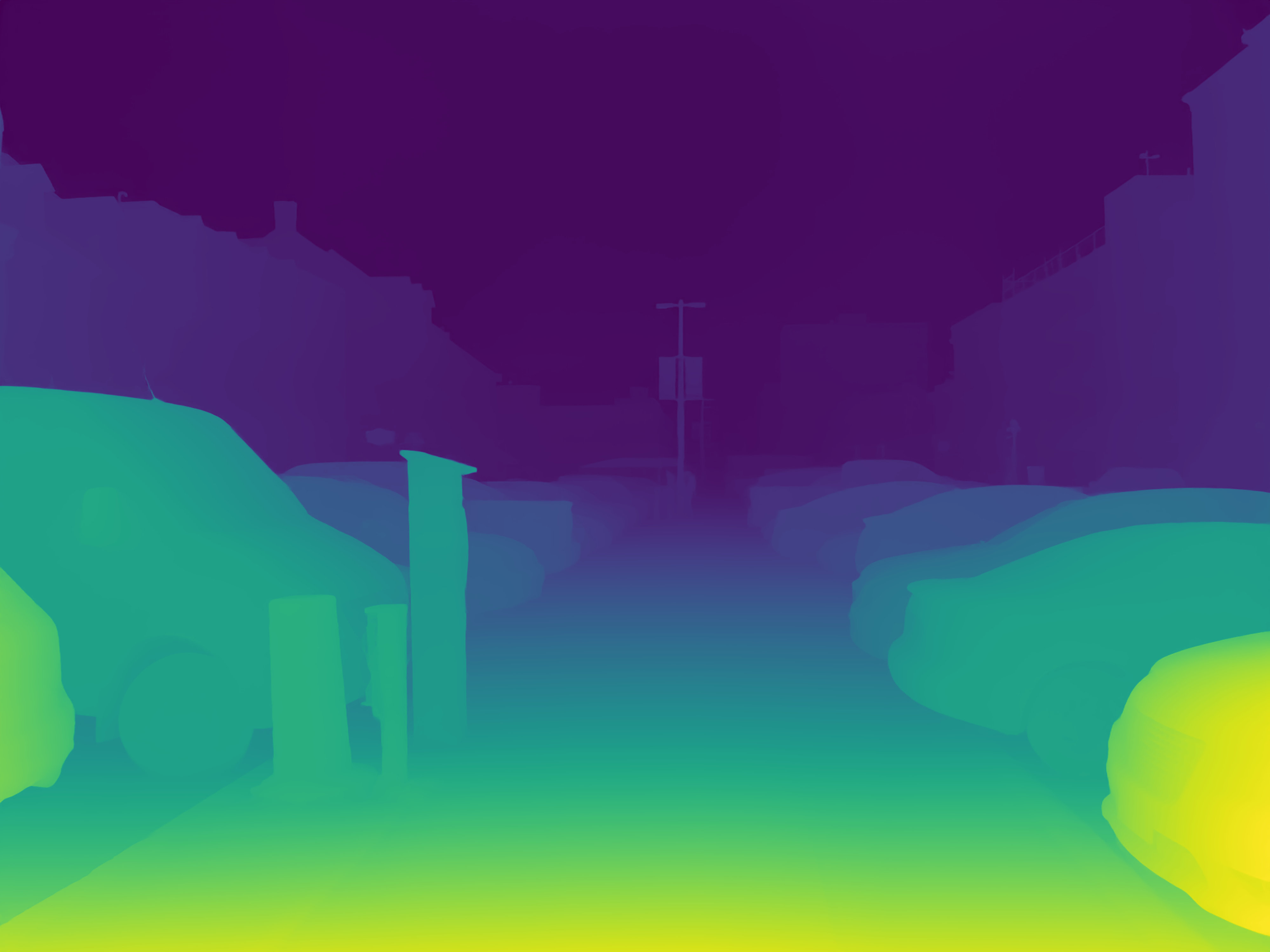
## Image 1
Source image:

Depth data extracted by Matrix Eyes:
Generated stereogram - works best when [viewed in fullscreen](https://raw.githubusercontent.com/wiki/zlogic/matrix-eyes/Examples/img1.stereo.jpg):

# Instructions
## Installation
Download a copy of Matrix Eyes from [Releases](releases) and extract it into in a directory.
The following versions are available:
* Windows
* wgpu-spirv-f16-fusion (vendor-neutral GPU version with f16 precision and fusion enabled, runs on a GPU with 8GB of VRAM, performance comparable to candle-cuda)
* wgpu-spirv-f16-fusion-autotune (vendor-neutral GPU version with f16 precision, fusion and autotune enabled, runs on a GPU with 8GB of VRAM)
* wgpu-spirv-fusion-autotune (vendor-neutral GPU version with fusion and autotune enabled, fails to run on a GPU with 8GB of VRAM)
* wgpu-spirv-autotune (vendor-neutral GPU version with autotune enabled, fails to run on a GPU with 8GB of VRAM)
* wgpu-spirv-fusion (vendor-neutral GPU version with fusion enabled, runs on a GPU with 8GB of VRAM, performance comparable to candle-cuda)
* cuda-bf16-fusion (CUDA version with bf16 precision and fusion enabled, runs on a GPU with 8GB of VRAM)
* cuda-fusion-autotune (CUDA version with fusion and autotune enabled, fails to run on a GPU with 8GB of VRAM)
* cuda-fusion (CUDA version with fusion enabled, runs on a GPU with 8GB of VRAM)
* Ubuntu
* wgpu-spirv-f16-fusion (vendor-neutral GPU version with f16 precision and fusion enabled, runs on a GPU with 8GB of VRAM, performance comparable to candle-cuda)
* wgpu-spirv-f16-fusion-autotune (vendor-neutral GPU version with f16 precision, fusion and autotune enabled, runs on a GPU with 8GB of VRAM)
* wgpu-spirv-fusion-autotune (vendor-neutral GPU version with fusion and autotune enabled, fails to run on a GPU with 8GB of VRAM)
* wgpu-spirv-autotune (vendor-neutral GPU version with autotune enabled, fails to run on a GPU with 8GB of VRAM)
* wgpu-spirv-fusion (vendor-neutral GPU version with fusion enabled, runs on a GPU with 8GB of VRAM, performance comparable to candle-cuda)
* cuda-bf16-fusion (CUDA version with bf16 precision and fusion enabled, runs on a GPU with 8GB of VRAM)
* cuda-fusion-autotune (CUDA version with fusion and autotune enabled, fails to run on a GPU with 8GB of VRAM)
* cuda-fusion (CUDA version with fusion enabled, runs on a GPU with 8GB of VRAM)
* macOS
* wgpu-metal-f16-fusion (wgpu version with fusion with f16 precision and fusion enabled, uses 8+ GB when running, runs faster than f16-fusion-autotune)
* wgpu-metal-f16-fusion-autotune (wgpu version with f16 precision, fusion and autotune enabled, uses 8+ GB when running)
* wgpu-metal-fusion (wgpu version with fusion enabled, uses 10 GB when running, runs faster than fusion-autotune)
* wgpu-metal-fusion-autotune (wgpu version with fusion and autotune enabled, uses 10 GB when running)
For the Windows `cuda` version, download the [Burn CUDA libraries](https://github.com/zlogic/matrix-eyes/releases/download/0.1.4/cuda-Windows-x86_64-burn.zip) artifact and extract its contents into the same directory. Set the `CUDA_PATH` environment variable to the path where you've extracted matrix-eyes and the Burn CUDA libraries artifact.
Download the model checkpoints:
```shell
mkdir checkpoints
curl -LJ -o checkpoints/depth_pro.pt https://ml-site.cdn-apple.com/models/depth-pro/depth_pro.pt
```
## Usage
To gerate a depth image, run:
```shell
matrix-eyes [--focal-length=] [--checkpoint-path=] [--image-output-format=] [--resize-scale=] [--stereo-amplitude=] [--mesh=] [--convert-checkpoints]
```
`--focal-length=` is an optional argument to specify a custom focal length for images with perspective projection, for example, `--focal-length=26`;
this should be the image's focal length in 35mm equivalent.
If not specified, EXIF metadata will be used; if EXIF data is not available, the focal length will be estimated using Depth Pro.
`--checkpoint-path=` is an optional argument to specify a custom path to the Depth Pro checkpoints file, `--checkpoint-path=./ckpoint.pt`.
`--image-output-format=` is an optional argument to specify the image output format, for example `--image-output-format=depthmap` or `--image-output-format=stereogram`.
`depthmap` (the default option) outputs a depth map image, while `--image-output-format=stereogram` outputs a stereogram image.
`--resize-scale=` is an optional argument to specify a custom scale for the stereogram image output, for example `--resize-scale=0.25`.
This can help with making noise pixels large enough to be visible.
`--stereo-amplitude` is an optional argument to specify the maximum offset/depth for stereograms (relative to image width); might need to be reduced if most of the image consists of foreground objects, for example `--stereo-amplitude=0.0625`.
`--mesh=` is an optional argument to specify how to output OBJ and PLY meshes mode, for example `--mesh=vertex-colors` or `--mesh=texture-coordinates`.
`plain` (the default option) outputs the mesh without any color or texture, `vertex-colors` outputs the mesh with colors assigned to every vertex, and `texture-coordinates` will add texture coordinates.
`--convert-checkpoints` will convert checkpoints from a `.pt` (Python pickle) format into a more efficient Burn format.
`` specifies the filename for the source file; supported formats are `jpg` and `png`.
`` is the output filename:
* If the filename ends with `.obj`, this will save a 3D [Wavefront OBJ file](https://en.wikipedia.org/wiki/Wavefront_.obj_file).
* If the filename ends with `.ply`, this will save a 3D [PLY binary file](https://en.wikipedia.org/wiki/PLY_(file_format)).
* If the filename ends with `.png`, this will save a PNG image (depth map or stereogram).
* If the filename ends with `.jpg`, this will save a JPEG image (depth map or stereogram).
### GPU details
Matrix Eyes was tested to support CPU-only and GPU-accelerated processing on:
* Apple Macbook Pro M4 Max (2024) (ndarray-accelerate, ndarray and wgpu versions)
* Apple Macbook Pro M1 Max (2021) (ndarray-accelerate, ndarray and wgpu versions)
* Windows 11, i7-11800H, Geforce RTX 3070 (candle-cuda, wgpu and ndarray versions)
* Only wgpu-fusion worked successfully, as other versions need more than 8GB VRAM and cause exceptions or device loss issues.
* Fedora 41 in WSL (ndarray version)