https://github.com/aamitn/kinesim
A robot simulator written in ThreeJS , with inverse kinematics support
https://github.com/aamitn/kinesim
simulation threejs
Last synced: about 1 month ago
JSON representation
A robot simulator written in ThreeJS , with inverse kinematics support
- Host: GitHub
- URL: https://github.com/aamitn/kinesim
- Owner: aamitn
- License: mit
- Created: 2025-03-16T21:10:16.000Z (over 1 year ago)
- Default Branch: main
- Last Pushed: 2025-03-16T21:16:33.000Z (over 1 year ago)
- Last Synced: 2025-03-16T22:24:31.174Z (over 1 year ago)
- Topics: simulation, threejs
- Language: JavaScript
- Homepage: https://aamitn.github.io/kinesim/
- Size: 307 KB
- Stars: 0
- Watchers: 1
- Forks: 0
- Open Issues: 0
-
Metadata Files:
- Readme: README.md
- License: LICENSE
Awesome Lists containing this project
README
# KineSim robot-simulator

KineSim: A three.js based 3D robot interface.
# How To
Download or clone. Open `index.html` or [RoboSim](https://aamitn.github.io/kinesim/). Enjoy 🤖😀
You may need to use Chrome, since some ES6 features are not supported in other browsers yet.
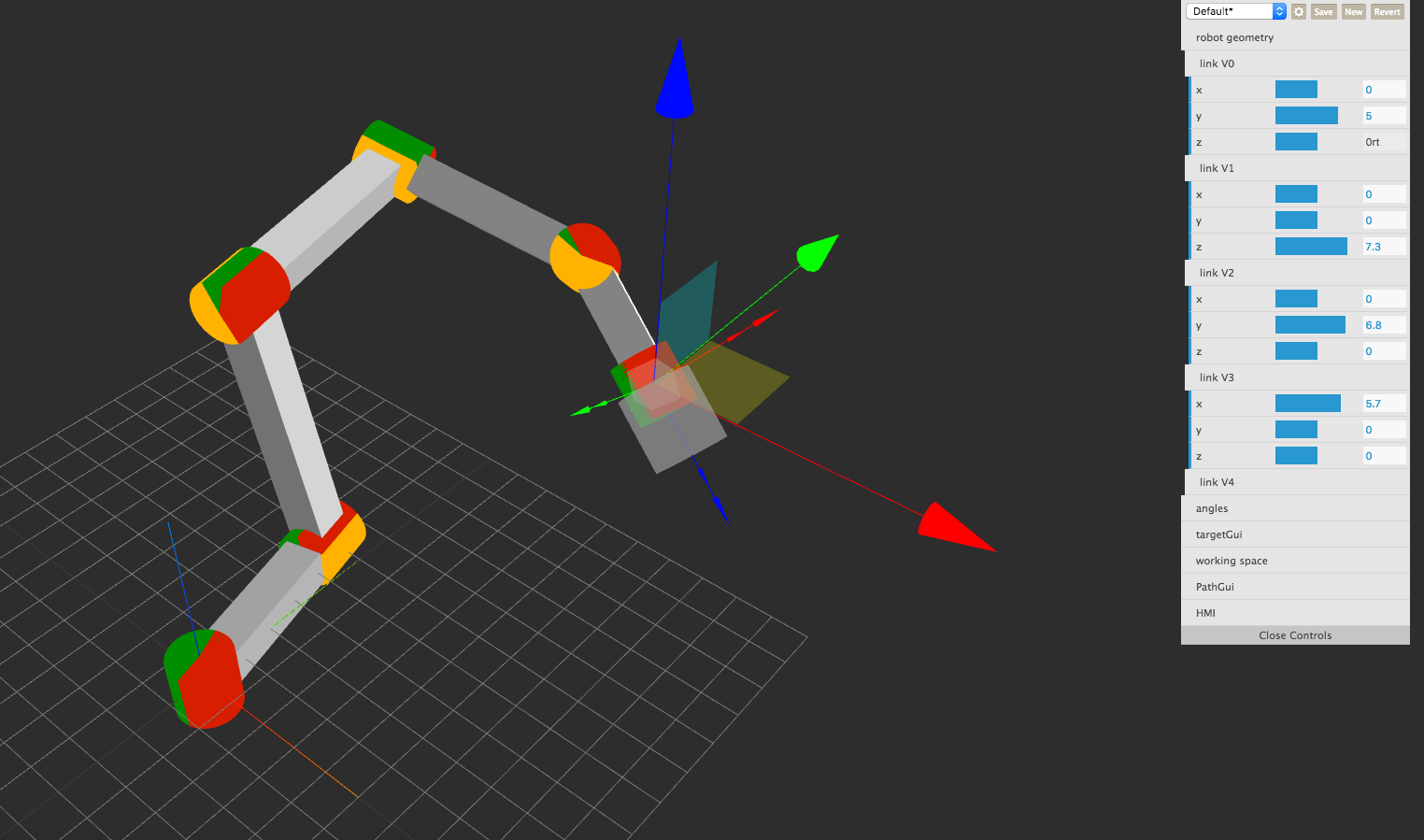
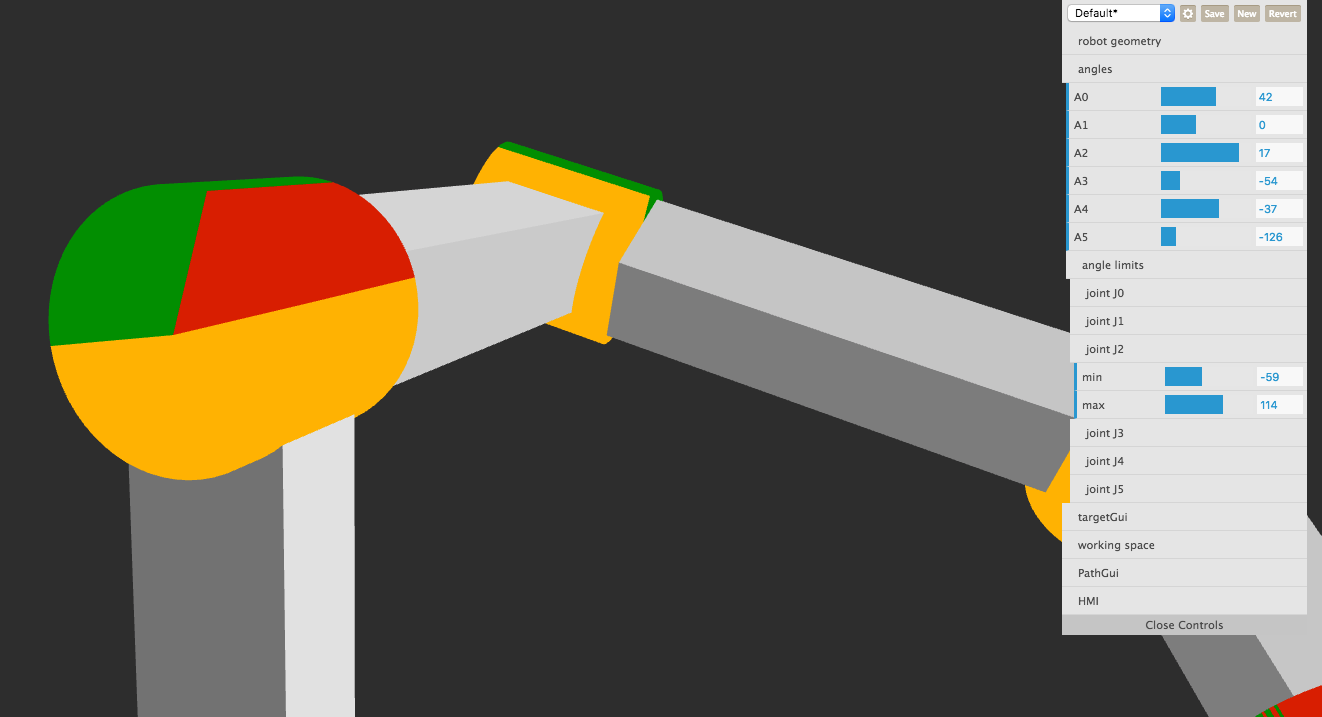
# Geometry
Configure the robot geometry using the *geometry* tab.
# Angle limits
Angle limits are shown visualy. *red* negative, *green* positive
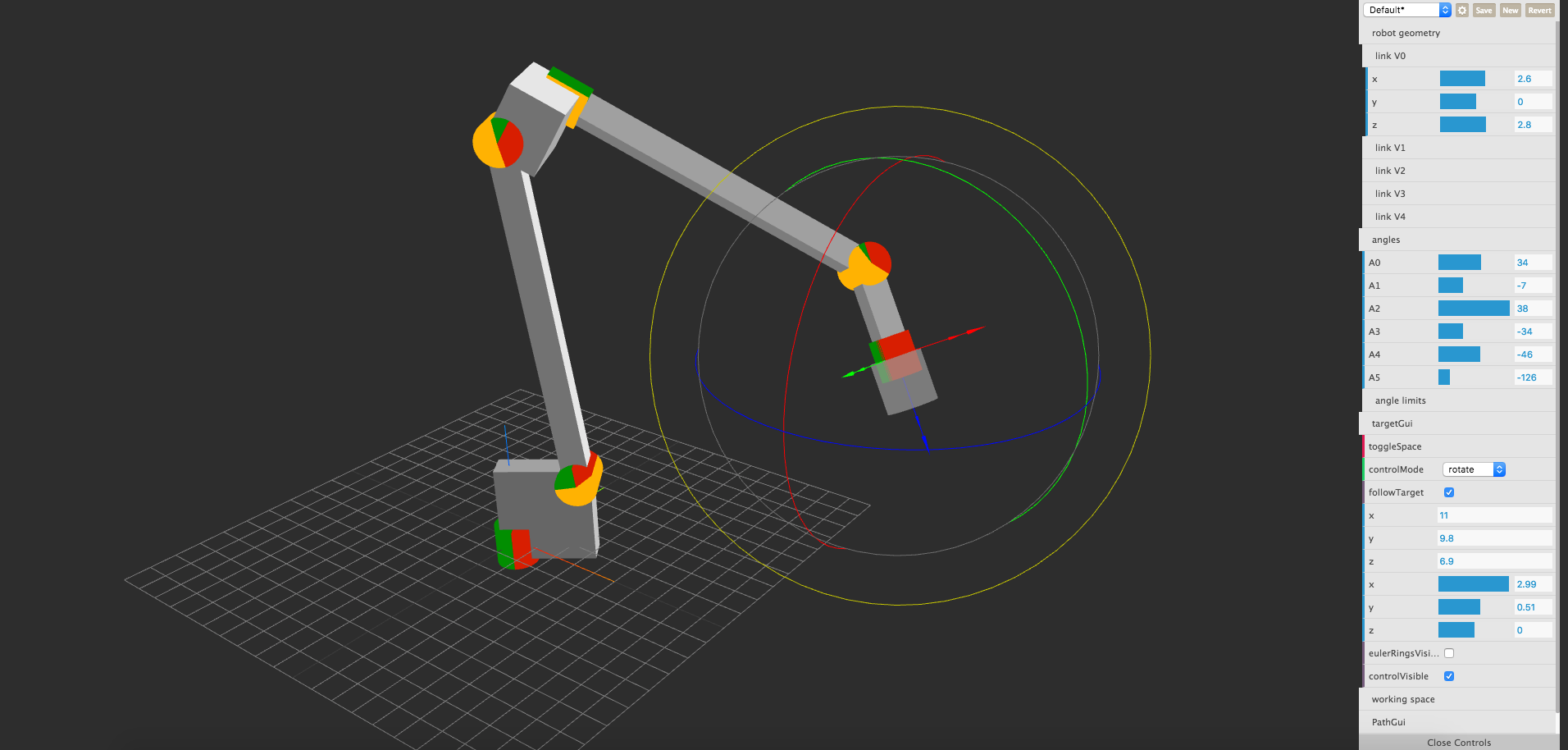
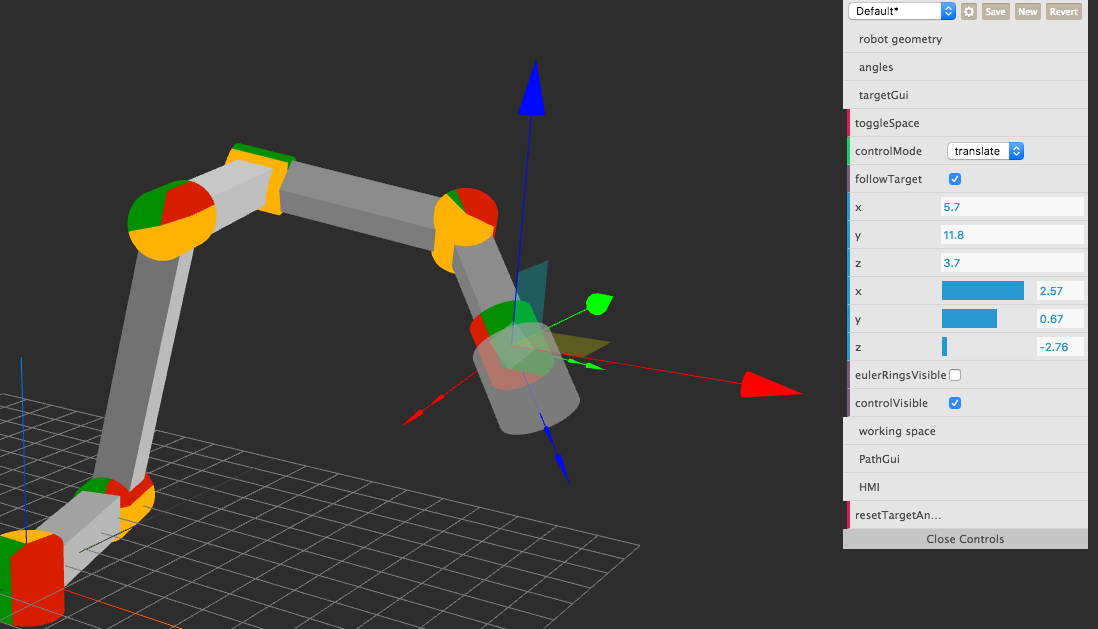
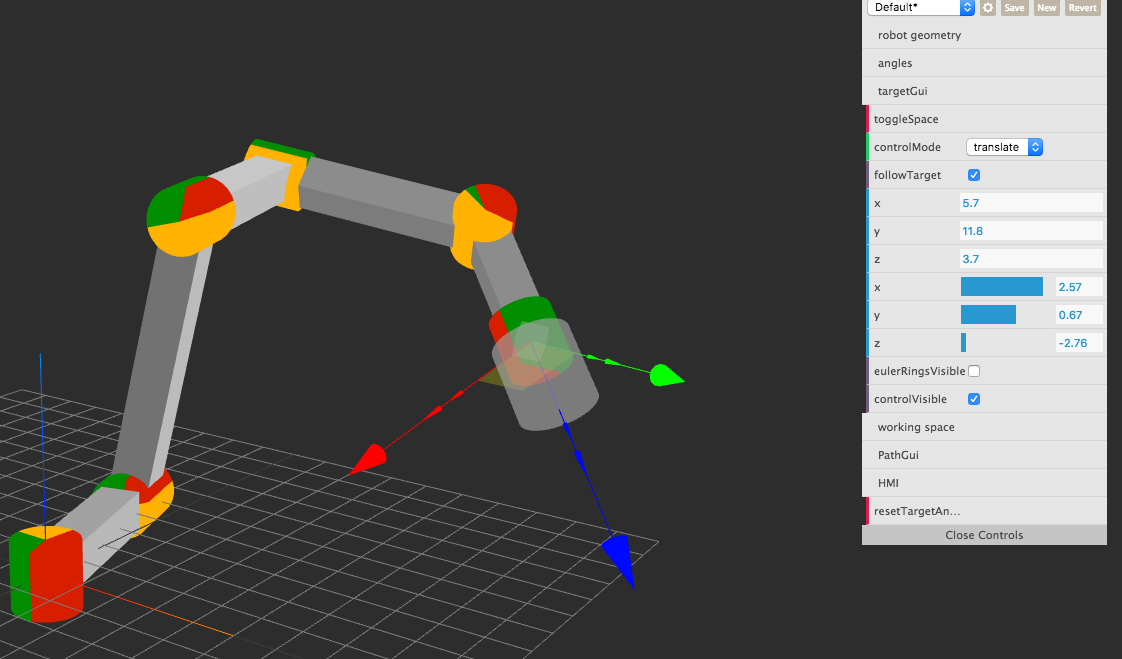
# Toggle Space
Switch between global and TCP aligned controls
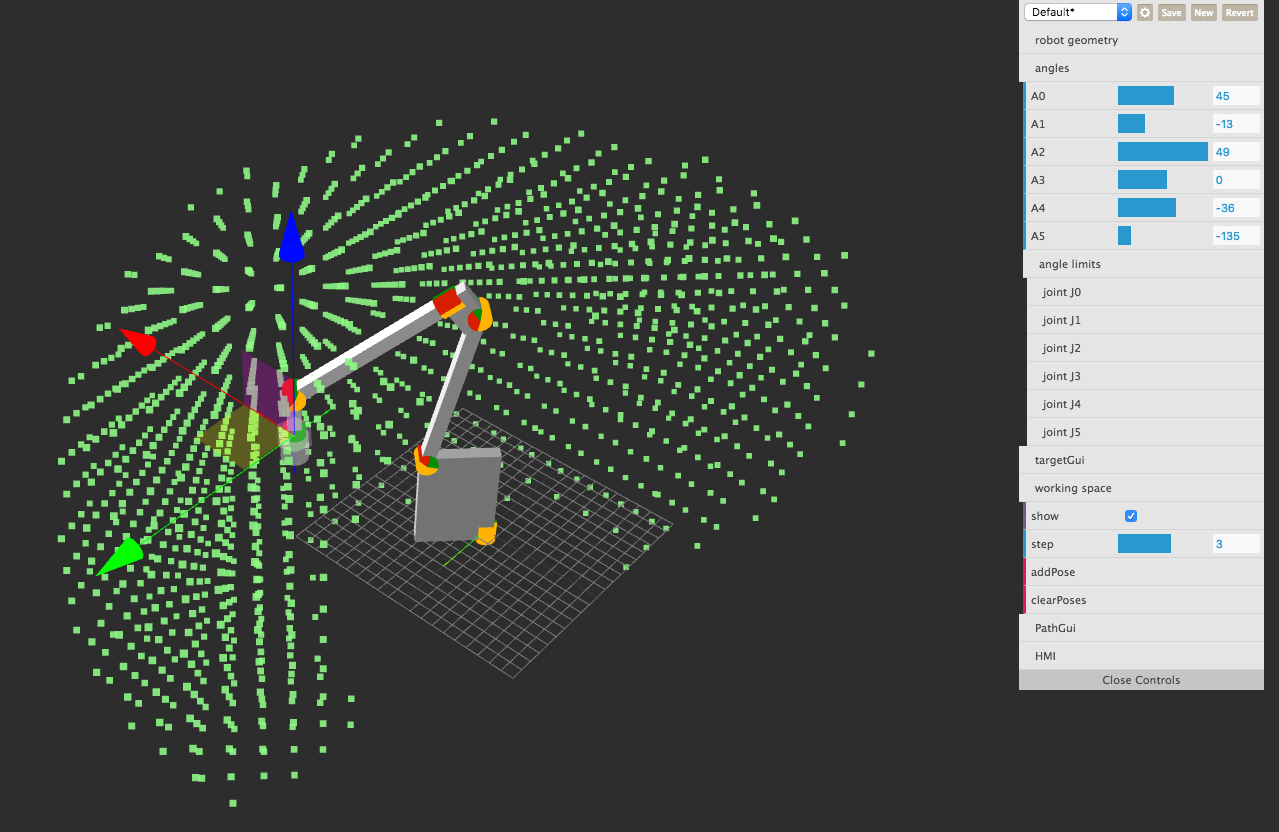
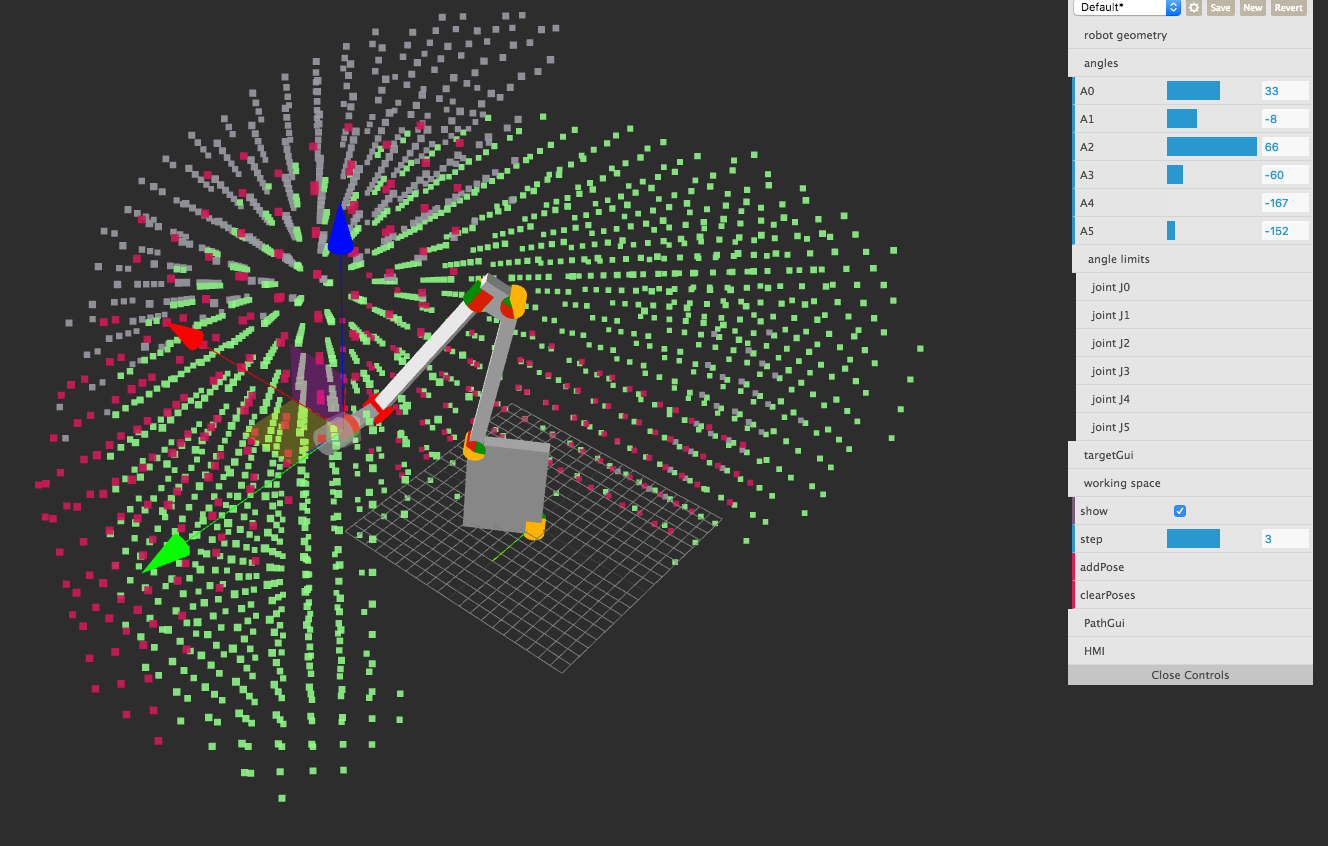
# Working Space
Click add Pose to visualize the working area for the current TCP orientation. Add muliple poses to compare work area vs orientation.