https://github.com/aidudezzz/deepbots
A wrapper framework for Reinforcement Learning in the Webots robot simulator using Python 3.
https://github.com/aidudezzz/deepbots
openai-gym-environment python reinforcement-learning robotics webots
Last synced: over 1 year ago
JSON representation
A wrapper framework for Reinforcement Learning in the Webots robot simulator using Python 3.
- Host: GitHub
- URL: https://github.com/aidudezzz/deepbots
- Owner: aidudezzz
- License: gpl-3.0
- Created: 2019-11-16T17:55:31.000Z (over 6 years ago)
- Default Branch: dev
- Last Pushed: 2023-09-30T14:35:31.000Z (almost 3 years ago)
- Last Synced: 2025-03-01T00:58:06.630Z (over 1 year ago)
- Topics: openai-gym-environment, python, reinforcement-learning, robotics, webots
- Language: Python
- Homepage: https://deepbots.readthedocs.io/
- Size: 1.24 MB
- Stars: 255
- Watchers: 8
- Forks: 54
- Open Issues: 14
-
Metadata Files:
- Readme: README.md
- License: LICENSE
Awesome Lists containing this project
- awesome-webots - Deepbots
README
[](https://pypi.org/project/deepbots/)
[](https://test.pypi.org/project/deepbots/)
[](https://pepy.tech/project/deepbots)
[](https://github.com/aidudezzz/deepbots/blob/dev/LICENSE)
[](#contributors-)
Deepbots is a simple framework which is used as "middleware" between the free
and open-source [Cyberbotics' Webots](https://cyberbotics.com/) robot simulator
and Reinforcement Learning algorithms. When it comes to Reinforcement Learning
the [OpenAI gym](https://gym.openai.com/) environment has been established as
the most used interface between the actual application and the RL algorithm.
Deepbots is a framework which follows the OpenAI gym environment interface
logic in order to be used by Webots applications.
## Installation
### Prerequisites
1. [Install Webots](https://cyberbotics.com/doc/guide/installing-webots)
- [Windows](https://cyberbotics.com/doc/guide/installation-procedure#installation-on-windows)
- [Linux](https://cyberbotics.com/doc/guide/installation-procedure#installation-on-linux)
- [macOS](https://cyberbotics.com/doc/guide/installation-procedure#installation-on-macos)
2. [Install Python version 3.X](https://www.python.org/downloads/) (please
refer to
[Using Python](https://cyberbotics.com/doc/guide/using-python#introduction)
to select the proper Python version for your system)
3. Follow the [Using Python](https://cyberbotics.com/doc/guide/using-python)
guide provided by Webots
4. Webots provides a basic code editor, but if you want to use
[PyCharm](https://www.jetbrains.com/pycharm/) as your IDE refer to
[using PyCharm IDE](https://cyberbotics.com/doc/guide/using-your-ide#pycharm)
provided by Webots
You will probably also need a backend library to implement the neural networks,
such as [PyTorch](https://pytorch.org/) or
[TensorFlow](https://www.tensorflow.org/). Deepbots interfaces with RL agents
using the OpenAI gym logic, so it can work with any backend library you choose
to implement the agent with and any agent that already works with gym.
### Install deepbots
Deepbots can be installed through the package installer
[pip](https://pip.pypa.io/en/stable/) running the following command:
`pip install deepbots`
## Official resources
- On
[the deepbots-tutorials repository](https://github.com/aidudezzz/deepbots-tutorials)
you can find the official tutorials for deepbots
- On [the deepworlds repository](https://github.com/aidudezzz/deepworlds) you
can find examples of deepbots being used.
Feel free to contribute your
own!
## Citation
Conference paper (AIAI2020):
https://link.springer.com/chapter/10.1007/978-3-030-49186-4_6
```bibtex
@InProceedings{10.1007/978-3-030-49186-4_6,
author="Kirtas, M.
and Tsampazis, K.
and Passalis, N.
and Tefas, A.",
title="Deepbots: A Webots-Based Deep Reinforcement Learning Framework for Robotics",
booktitle="Artificial Intelligence Applications and Innovations",
year="2020",
publisher="Springer International Publishing",
address="Cham",
pages="64--75",
isbn="978-3-030-49186-4"
}
```
## How it works
First of all let's set up a simple glossary:
- `World`: Webots uses a tree structure to represent the different entities in
the scene. The World is the root entity which contains all the
entities/nodes. For example, the world contains the Supervisor and Robot
entities as well as other objects which might be included in the scene.
- `Supervisor`: The Supervisor is an entity which has access to all other
entities of the world, while having no physical presence in it. For example,
the Supervisor knows the exact position of all the entities of the world and
can manipulate them. Additionally, the Supervisor has the Supervisor
Controller as one of its child nodes.
- `Supervisor Controller`: The Supervisor Controller is a python script which
is responsible for the Supervisor. For example, in the Supervisor Controller
script the distance between two entities in the world can be calculated.
- `Robot`: The Robot is an entity that represents a robot in the world. It
might have sensors and other active components, like motors, etc. as child
entities. Also, one of its children is the Robot Controller. For example,
[epuck](https://cyberbotics.com/doc/guide/epuck) and
[TIAGo](https://cyberbotics.com/doc/guide/tiago-iron) are robots.
- `Robot Controller`: The Robot Controller is a python script which is
responsible for the Robot's movement and sensors. With the Robot Controller
it is possible to observe the world and act accordingly.
- `Environment`: The Environment is the interface as described by the OpenAI
gym. The Environment interface has the following methods:
- `get_observations()`: Return the observations of the robot. For example,
metrics from sensors, a camera image etc.
- step(action): Each timestep, the agent chooses an action, and the
environment returns the observation, the reward and the state of the
problem (done or not).
- `get_reward(action)`: The reward the agent receives as a result of their
action.
- `is_done()`: Whether it’s time to reset the environment. Most (but not all)
tasks are divided up into well-defined episodes, and done being True
indicates the episode has terminated. For example, if a robot has the task
to reach a goal, then the done condition might happen when the robot
"touches" the goal.
- `reset()`: Used to reset the world to the initial state.
In order to set up a task in Deepbots it is necessary to understand the
intention of the OpenAI gym environment. According to the OpenAI gym
documentation, the framework follows the classic “agent-environment loop”.
"Each timestep, the agent chooses an `action`, and the environment returns an
`observation` and a `reward`. The process gets started by calling `reset()`,
which returns an initial `observation`."

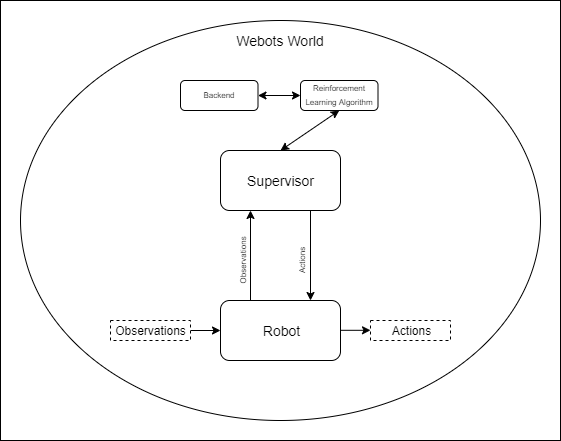
Deepbots follows this exact agent-environment loop with the only difference
being that the agent, which is responsible to choose an action, runs on the
Supervisor and the observations are acquired by the robot. The goal of the
deepbots framework is to hide this communication from the user, especially from
those who are familiar with the OpenAI gym environment. More specifically,
`SupervisorEnv` is the interface which is used by the Reinforcement Learning
algorithms and follows the OpenAI Gym environment logic. The Deepbots framework
provides different levels of abstraction according to the user's needs.
Moreover, a goal of the framework is to provide different wrappers for a wide
range of robots.
Deepbots also provides a default implementation of the `reset()` method,
leveraging Webots' built-in simulation reset functions, removing the need for
the user to implement reset procedures for simpler use-cases. It is always
possible to override this method and implement any custom reset procedure, as
needed.
#### Emitter - receiver scheme
Currently, the communication between the `Supervisor` and the `Robot` is
achieved via an `emitter` and a `receiver`. Separating the `Supervisor` from
the `Robot`, deepbots can fit a variety of use-cases, e.g. multiple `Robots`
collecting experience and a `Supervisor` controlling them with a single agent.
The way Webots implements `emitter`/`receiver` communication requires messages
to be packed and unpacked, which introduces an overhead that becomes
prohibiting in use-cases where the observations are high-dimensional or long,
such as camera images. Deepbots provides another partially abstract class that
combines the `Supervisor` and the `Robot` into one controller and circumvents
that issue, while being less flexible, which is discussed
[later](#combined-robot-supervisor-scheme).
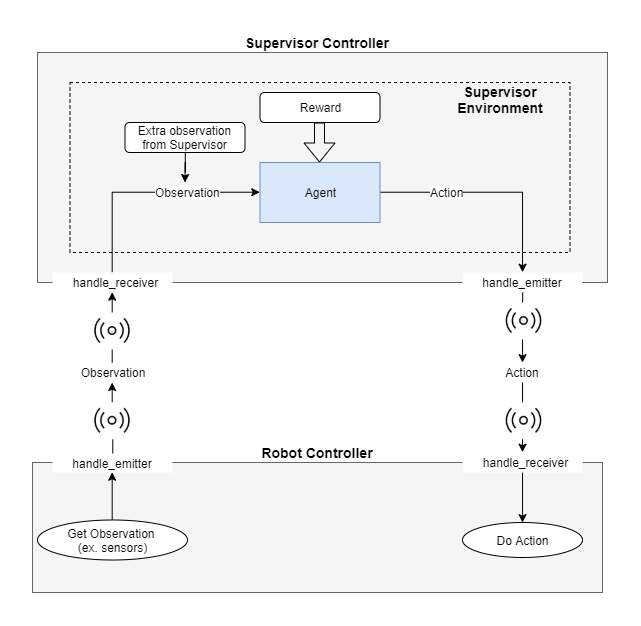
On one hand, the `emitter` is an entity which is provided by Webots, that
broadcasts messages to the world. On the other hand, the `receiver` is an
entity that is used to receive messages from the `World`. Consequently, the
agent-environment loop is transformed accordingly. Firstly, the `Robot` uses
its sensors to retrieve the observation from the `World` and in turn uses the
`emitter` component to broadcast this observation. Secondly, the `Supervisor`
receives the observation via the `receiver` component and in turn, the agent
uses it to choose an action. It should be noted that the observation the agent
uses might be extended from the `Supervisor`. For example, a model might use
LiDAR sensors installed on the `Robot`, but also the Euclidean distance between
the `Robot` and an object. As it is expected, the `Robot` does not know the
Euclidean distance, only the `Supervisor` can calculate it, because it has
access to all entities in the `World`.
You can follow the
[emitter-receiver scheme tutorial](https://github.com/aidudezzz/deepbots-tutorials/blob/master/emitterReceiverSchemeTutorial/README.md)
to get started and work your way up from there.
#### Combined Robot-Supervisor scheme
As mentioned earlier, in use-cases where the observation transmitted between
the `Robot` and the `Supervisor` is high-dimensional or long, e.g. high
resolution images taken from a camera, a significant overhead is introduced.
This is circumvented by inheriting and implementing the partially abstract
`RobotSupervisor` that combines the `Robot controller` and the
`Supervisor Controller` into one, forgoing all `emitter`/`receiver`
communication. This new controller runs on the `Robot`, but requires
`Supervisor` privileges and is limited to one `Robot`, one `Supervisor`.
You can follow the
[robot-supervisor scheme tutorial](https://github.com/aidudezzz/deepbots-tutorials/tree/master/robotSupervisorSchemeTutorial)
to get started and work your way up from there. We recommended this
tutorial to get started with deepbots.
### Abstraction Levels
The deepbots framework has been created mostly for educational purposes. The
aim of the framework is to enable people to use Reinforcement Learning in
Webots. More specifically, we can consider deepbots as a wrapper of Webots
exposing an OpenAI gym style interface. For this reason there are multiple
levels of abstraction. For example, a user can choose if they want to use CSV
`emitter`/`receiver` or if they want to make an implementation from scratch. In
the top level of the abstraction hierarchy is the `SupervisorEnv` which is the
OpenAI gym interface. Below that level there are partially implemented classes
with common functionality. These implementations aim to hide the communication
between the `Supervisor` and the `Robot`, as described in the two different
schemes ealier. Similarly, in the `emitter`/`receiver` scheme the `Robot` also
has different abstraction levels. According to their needs, users can choose
either to process the messages received from the `Supervisor` themselves or use
the existing implementations.
### Acknowledgments
This project has received funding from the European Union's Horizon 2020
research and innovation programme under grant agreement No 871449 (OpenDR).
This publication reflects the authors’ views only. The European Commission is
not responsible for any use that may be made of the information it contains.
## Contributors ✨
Thanks goes to these wonderful people
([emoji key](https://allcontributors.org/docs/en/emoji-key)):

Manos Kirtas
💻

Kostas Tsampazis
💻

Jiun Kai Yang
💻

MentalGear
🤔

Dreamtale
🐛

Nikolaos Kokkinis-Ntrenis
💻 📖 🤔
This project follows the
[all-contributors](https://github.com/all-contributors/all-contributors)
specification. Contributions of any kind welcome!
Special thanks to Papanikolaou Evangelia for designing project's logo!