https://github.com/avisingh599/mono-vo
An OpenCV based implementation of Monocular Visual Odometry
https://github.com/avisingh599/mono-vo
Last synced: 15 days ago
JSON representation
An OpenCV based implementation of Monocular Visual Odometry
- Host: GitHub
- URL: https://github.com/avisingh599/mono-vo
- Owner: avisingh599
- License: mit
- Created: 2015-06-08T18:52:50.000Z (over 10 years ago)
- Default Branch: master
- Last Pushed: 2017-04-18T17:27:22.000Z (over 8 years ago)
- Last Synced: 2024-05-21T12:40:40.765Z (over 1 year ago)
- Language: C++
- Size: 86.9 KB
- Stars: 753
- Watchers: 46
- Forks: 291
- Open Issues: 15
-
Metadata Files:
- Readme: README.md
- License: LICENSE
Awesome Lists containing this project
- awesome-visual-slam - Nister's Five Point Algorithm for Essential Matrix estimation, and FAST features, with a KLT tracker
- SLAM-Resources-for-Beginner - avisingh599/mono-vo
README
This is an OpenCV 3.0 based implementation of a monocular visual odometry algorithm.
## Algorithm
Uses Nister's Five Point Algorithm for Essential Matrix estimation, and FAST features, with a KLT tracker.
More details are available [here as a report](http://avisingh599.github.io/assets/ugp2-report.pdf), and
[here as a blog post](http://avisingh599.github.io/vision/monocular-vo/).
Note that this project is not yet capable of doing reliable relative scale estimation,
so the scale informaion is extracted from the KITTI dataset ground truth files.
## Demo Video
[](http://www.youtube.com/watch?v=homos4vd_Zs)
## Requirements
OpenCV 3.0
## How to compile?
Provided with this repo is a CMakeLists.txt file, which you can use to directly compile the code as follows:
```bash
mkdir build
cd build
cmake ..
make
```
## How to run?
After compilation, in the build directly, type the following:
```bash
./vo
```
## Before you run
In order to run this algorithm, you need to have either your own data,
or else the sequences from [KITTI's Visual Odometry Dataset](http://www.cvlibs.net/datasets/kitti/eval_odometry.php).
In order to run this algorithm on your own data, you must modify the intrinsic calibration parameters in the code.
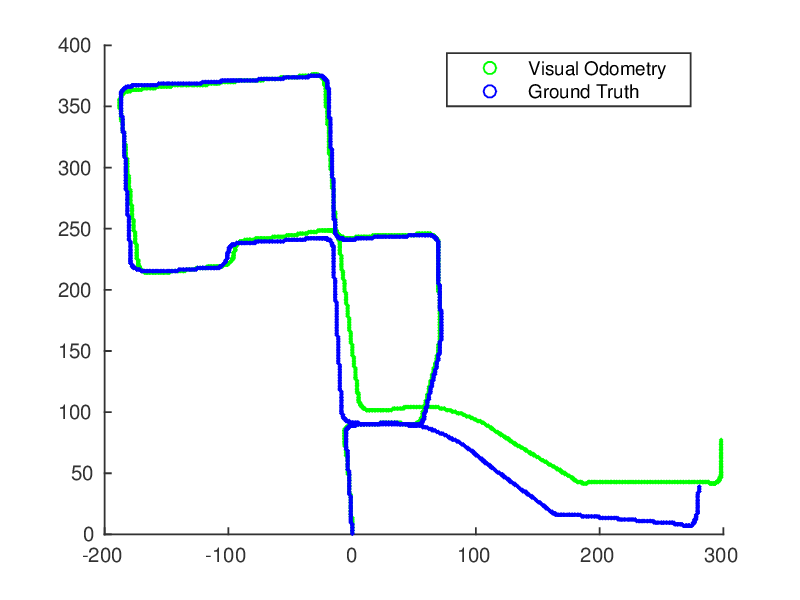
## Performance
## Contact
For any queries, contact: avisingh599@gmail.com
## License
MIT